ในภารกิจวันที่ 27 พฤษภาคม 2020 นี้ NASA และ SpaceX กำลังจะปล่อยยาน Crew Dragon จากสหรัฐอเมริกาเพื่อพานักบินอวกาศไปที่ ISS นับเป็นครั้งแรกในรอบ 9 ปีที่ผ่านมาที่ NASA มียานปล่อยนักบินอวกาศเป็นของตัวเองหลังจากที่ต้องใช้ยาน Soyuz ของรัสเซียมาตลอดตั้งแต่ปลดระวางกระสวยอวกาศทั้งหมดในปี 2011 และก่อนการปล่อยของจริง SpaceX ก็ไม่พลาดที่จะหาอะไรสนุก ๆ มาให้เราเล่นอย่าง ISS Docking Simulator ที่จำลองการเชื่อมต่อยาน Crew Dragon กับ ISS (หากใครยังไม่ได้เล่นสามารถกดเข้ามาเล่นได้ที่นี่)
ชาว Kerbal Space Program (KSP) ที่ได้ลองเล่น Simulator จำลองการ Docking ของยาน Crew Dragon กับ ISS ก่อนหน้านี้ที่ SpaceX ปล่อยออกมา เราอาจจะรู้สึกว่ามันง่ายเพราะว่าใน KSP นั้น เราจะต้องสร้างตั้งแต่จรวดยันสถานีอวกาศแถมการปล่อยก็ไม่ได้ง่ายทีเดียวเพราะต้องทำ Orbit insertion, Rendezvous และอื่น ๆ อีกมากมาย กว่าจะไปถึง ISS ได้ รอบนี้ NASA กับ Kerbal Space Program ก็เลยทวีตท้าชาว Kerbal ทั่วโลกให้มาร่วมกันส่งคลิปจำลองการปล่อยของตัวเองด้วย KSP แล้วนำไปโพสต์ใต้ Tweet ของ @KerbalSpaceP
หากใครอยากลองจำลองการปล่อยด้วย KSP แล้วละก็เรามี Flight Plan และ Mission Profile สำหรับ Crew Dragon Demo-2 มาให้ก็คือ Flight ที่จะปล่อยในวันที่ 27 พฤษภาคม 2020 นี้นี่เองและทาง SpaceX ก็มี Animation การปล่อย Crew Dragon ในภารกิจ Demo-2 ครั้งนี้มาให้เราดูด้วย
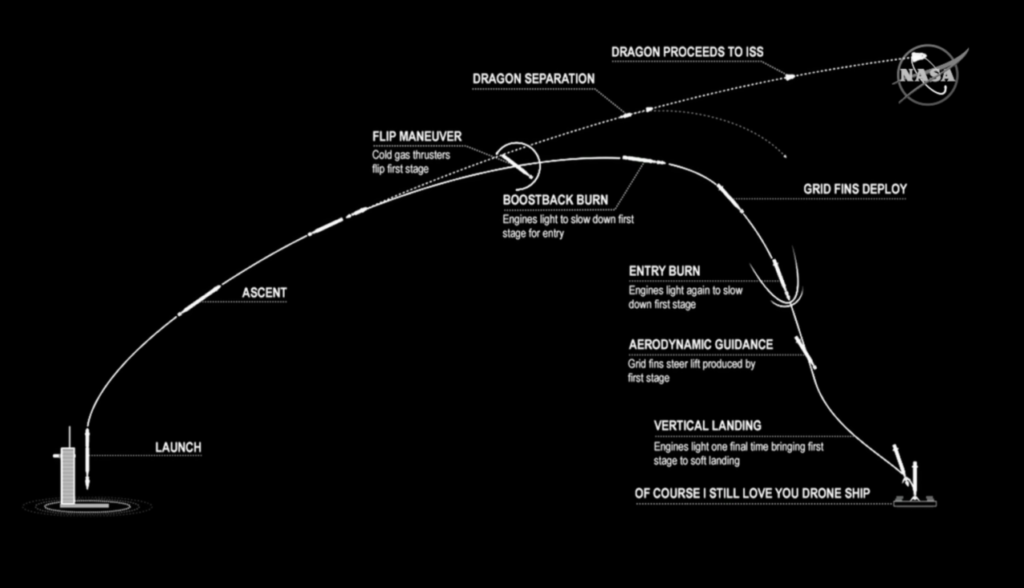
- T – 3 s | Ignition Sequence Start
- T + 0 | Liftoff
- T + 67 s | max Q (Maximum dynamic pressure)
- T + 145 s | Main engine cutoff (MECO)
- T + 148 s | Stage separation, booster initiate landing sequence
- T + 156 s | Second-engine start-1 (SES-1)
- T + 195 s | Fairing deploy
- T + 514 s | Second-engine cutoff-1 (SECO-1)
- T + 3086 s | Second-engine start-2 (SES-2)
- T + 3090 s | Second-engine cutoff-2 (SECO-2)
- Proceed to orbit insertion and ISS rendezvous
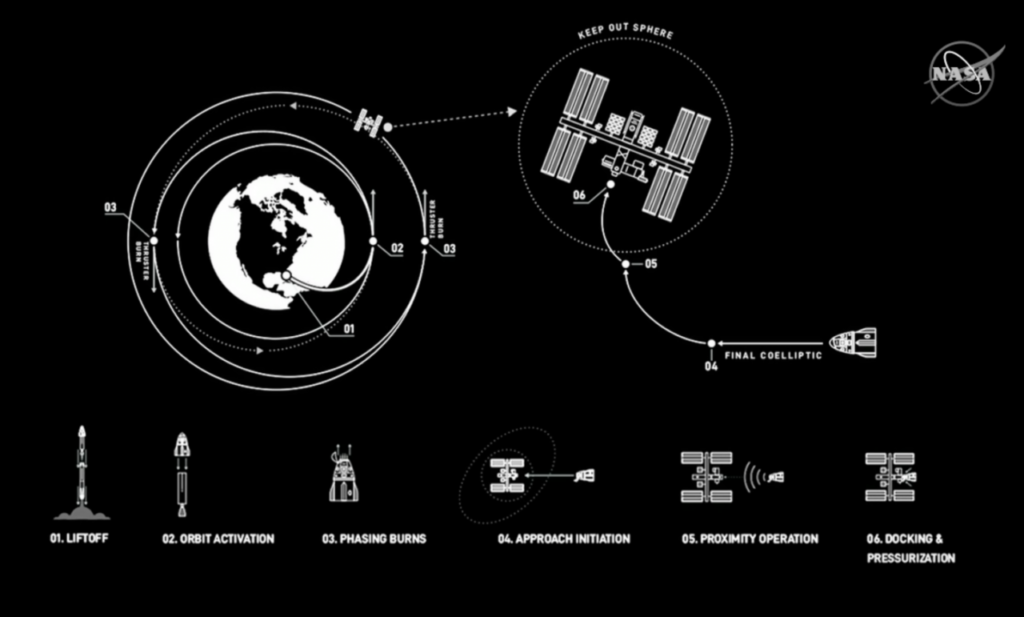
หากนำ Timeline ข้างบนมาทำผังวงโคจรก็จะแบ่งได้เป็น 6 Phase ใหญ่ ๆ Phase 1 นั้นก็คือการปล่อยนั้นเองซึ่ง Timeline ก็ดังที่กล่าวไว้ข้างบนแต่เพราะว่าทาง NASA และ KSP ไม่ได้กำหนดว่าจะต้องใช้ Timeline แบบเดียวกันจึงอาจจะไม่จำเป็นต้องกำหนด Timeline ให้ตรงกันก็ได้ Phase 2 ก็คือ Orbit Activation หรือ Orbit Insertion ด้วยการ Burn ให้จุด Periapsis ให้สูงขึ้นมาพอ ๆ กับ Apoapsis จากนั้นจึงทำ Perigee burn เพื่อยก Apoapsis เตรียมทำ Phasing burn ซึ่งเป็น Phase 3 ของภารกิจ Demo-2 ใน Phasing burn จะเป็นการยกวงโคจรให้เท่ากับวงโคจร ISS เพื่อทำ Rendezvous และเตรียม Approach ซึ่งก็คือ Phase 4
ใน Phase 5 นี้เองเราอาจจะคุ้น ๆ นั้นก็คือจุดที่เราเกิดใน ISS Docking Simulator ที่ SpaceX ทำมาให้เราเล่น จุดนี้เป็นจุดนอก ISS เรียกว่า Keep Out Sphere หรือ KOS เป็นพื้นที่รัศมี 200 เมตรจาก ISS เป็นรัศมีที่ยานทุกลำก่อนข้ามรัศมีนี้มาจะต้องถูกประเมินจากศูนย์ควบคุมและรับคำสั่ง Go/No Go จากศูนย์ควบคุมก่อนที่จะข้ามมาได้แล้วพอข้ามมาได้แล้วก็ไม่ได้จบแค่นั้นเพราะยังจะต้องคอยหยุดที่ Decision point เป็นระยะเพื่อรอคำสั่งต่อไปที่ระยะต่าง ๆ ทั้งนี้เพื่อลดความเสี่ยงที่จะเกิดขึ้นจาก Missed Approach ซึ่งอาจทำให้เกิดการศูนย์เสียได้ไม่ว่าจะเป็น ISS เองหรือ Crew Dragon เอง
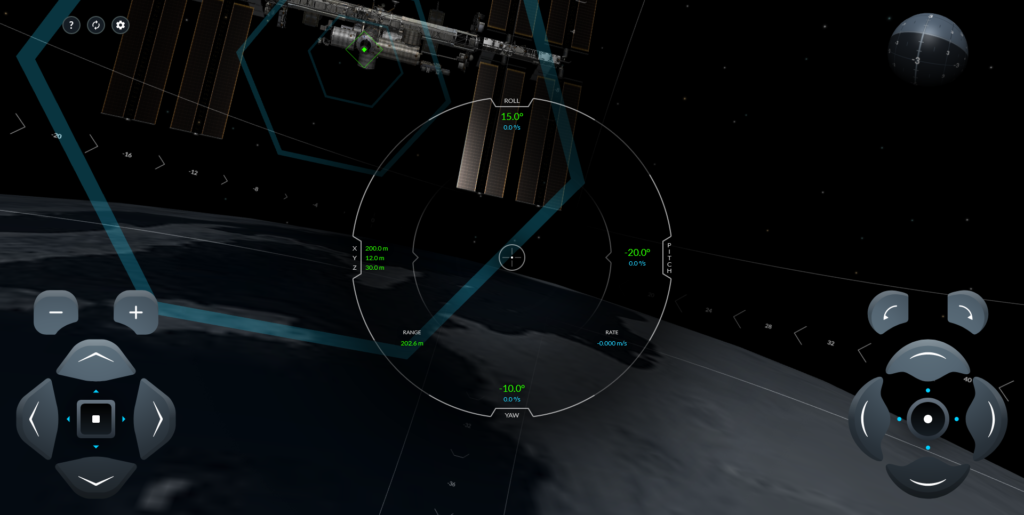
เมื่อผ่าน Phase 5 แล้วขั้นตอนสุดท้ายก็คือการเชื่อมต่อและการปรับความดันระหว่างยานก่อนที่จะเปิด Hatch ได้นั้นเอง Process พวกนี้เองที่เราอาจจะคิดว่ามันก็ใช้แค่กับยานอวกาศแต่จริง ๆ แล้วมันเอามาใช้กับหลายอย่างมาก ยกตัวอย่างระบบบนยาน Crew Dragon ที่มีพื้นฐานมาจากระบบนำทางบนเครื่องบิน (ผู้เขียนเล่น X-Plane 11 ฮา) เพราะว่าทุก Phase ที่กล่าวมานี้จะเกิดขึ้นแบบอัตโนมัติ นักบินอวกาศมีหน้าที่แค่นั่งดูและเตรียม Take over หากเกิดข้อผิดพลาด ใน Phase 4 นี่เองระบบนำทางบนยานจะค่อย ๆ พา Crew Dragon เข้าใกล้ ISS เรื่อย ๆ เรียกว่า (Low inertial approach) ใน Phase ที่ 5 นี่เองระบบ Autonomous Docking System ของยานจะทำหน้าที่คล้าย ๆ ระบบ ILS (Instrument Landing System) บนเครื่องบิน ซึ่งระบบ ILS บนเครื่องบินใช้ในการนำทางนักบินที่บินแบบ IFR (Instrument Flight Rules) ภายใต้สภาวะอากาศแบบ IMC (Instrument Meteorological Conditions) ง่าย ๆ ก็คือหมอกเยอะมองไม่เห็น นั่นแหละ และยังใช้ในการลงจอดอัตโนมัติที่เรียกว่า Autoland ด้วย
บน Crew Dragon คอมพิวเตอร์นำทางบนยานจะสื่อสารกับ ISS ตลอดเวลาเพื่อ Translate และ Rotate ยานให้ตรงกับ Docking Port หากใครลองเล่น Simulator แล้วจะรู้ว่าการ Translate ก็คือการเคลื่อนยานซ้ายขวาหน้าหลังบนล่างนั้นเอง ส่วนการ Rotate ก็คือ การหมุนยานนั้นเอง ส่วนใน KSP ก็จะเป็น LIN/ROT Mode หรือ Linear and Rotational Mode ในโหมด Docking นั้นเอง

เมื่อถึง Phase 6 ยาน Crew Dragon จะทำ Final approach ด้วยการยิง Thruster เพื่อค่อย ๆ นำยานเข้าเชื่อมกับ ISS อย่างช้า ๆ จนเชื่อมต่อในที่สุดแล้วก็ทำการ Pressurize เพื่อปรับความดันในยาน Crew Dragon ให้เท่ากับ ISS ก่อนที่จะเปิด Hatch ก็เปิดอันเสร็จสิ้นภารกิจ Departure ของ Crew Dragon Demo-2 สู่ ISS แต่ว่าหากใครอยากลองกลับโลกด้วยก็ได้เพราะว่าการกลับโลกนั้นก็มี Phase คล้าย ๆ ตอนมานั่นแหละ (ง่ายกว่าด้วย แค่อย่าทำ Parachute พังตอน Re-entry)
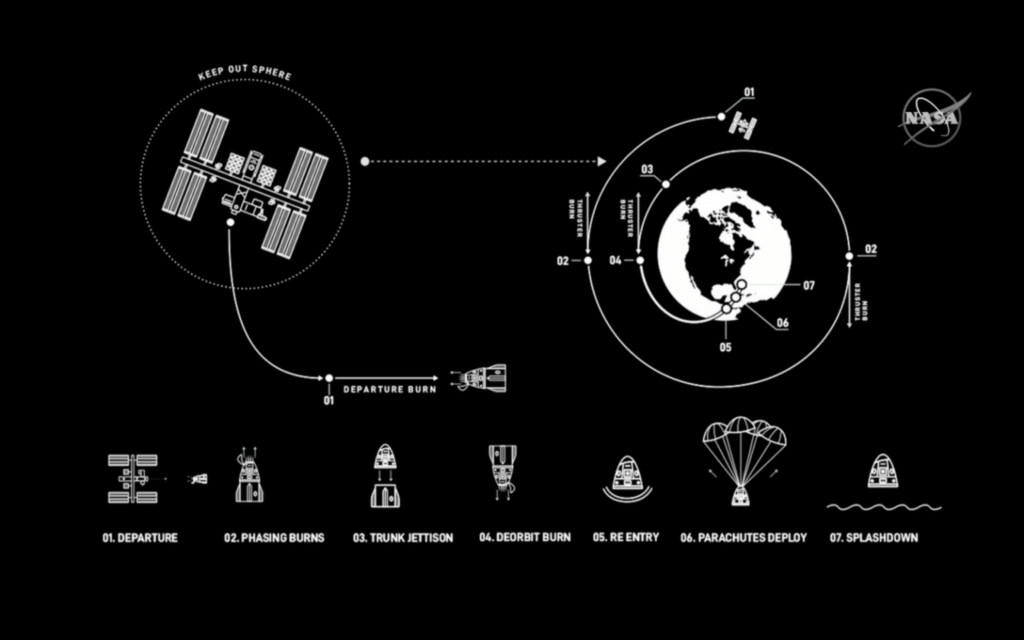
ขั้นตอนการกลับก็นั้นทำ Phasing burn เพื่อลดวงโคจรลงจากนั้นจึง Burn ครั้งสุดท้ายที่ Phase 4 เพื่อ De-orbit และ Re-entry เป็นอันจบภารกิจ Crew Dragon Demo-2 ฉบับ Kerbal Space Program หากใครสนใจทำก็สามารถลองทำแล้วอัดคลิปส่งไปให้ KSP และ NASA ใน Twitter ก่อนวันที่ 25 พฤษภาคม 2020 นี้ได้ ภารกิจ Demo-2 นี้เองจะเป็นภารกิจที่จะพิสูจน์ประสิทธิภาพและความปลอดภัยของระบบ Human Spaceflight System ของ NASA หาก Demo-2 สำเร็จ Crew Dragon จะถูกรับรองให้เป็นยานสำหรับจนส่งมนุษย์ขึ้นไปบน ISS โดย NASA
เรียบเรียงโดย ทีมงาน SPACETH.CO