หากพูดถึง SpaceX หลาย ๆ คนก็คนจะนึกถึงจรวด Falcon 9 จรวดลำแรกที่สามารถทำ Propulsive Landing แล้วนำกลับมาใช้ใหม่ได้ ซึ่งเป็นการลดต้นทุนทั้งด้านของการผลิตจรวดได้เป็นอย่างดีแล้วก็ยังไม่พอเพราะว่ามันยังทำให้ต้นทุนในการส่งดาวเทียมหรือ Payload อื่น ๆ ขึ้นไปในอวกาศถูกลงอีกด้วย แต่ถึงกระนั้นจุดเด่นของ Falcon 9 เองไม่ได้มีแค่นำกลับมาใช้ไม่ได้เพียงอย่างเดียวเพราะว่ามันยังแฝงการลดต้นทุนแบบที่แทบจะไม่มีผลกระทบต่อประสิทธิภาพเลย ในบทความนี้เราจะมาพูดถึงการลดต้นทุนการสร้างจรวด Falcon 9 ในด้านการออกแบบของ Landing legs ว่าทำไมต้องเป็น 4 ขาเป็น 3, 5 หรือ 6 ไม่ได้หรอ
คณิตศาสตร์ Falcon 9 Landing Legs
คำเตือน: ข้างล่างคือคณิตศาสตร์ที่คนเขียนเขียนเองก็ยังงงเอง (ฮา)
ขาลงจอด Falcon 9 มีทั้งหมด 4 ขาด้วยกันติดอยู่รอบมุมของจรวดเพื่อใช้ในการลงจอดบนฐานจอดท่ฝั่งหรือบน Drone Ship ในทะเล ซึ่งเบื้องหลังของขาลงจอดนี้ วิศวกรไม่ได้อยู่ ๆ ก็เลือกใช้ 4 ขาแต่มีการคำนวณและเปรียบเทียบประสิทธิภาพความมั่นคงและต้นทุนของการพัฒนาขาลงจอดแต่ละแบบแล้วและขาแบบ 4 มุมเป็นขาที่ประหยัดและขณะเดียวกันก็มีความมั่นคงมากในระดับนึงเลยด้วย แต่จริง ๆ แล้วหาก SpaceX อยากจะใช้ 3 ขาก็ได้เหมือนกันแต่เราจะมาดูกันว่าทำไม SpaceX ไม่ใช้ 3 ขา หรือ 5 ขา แต่ใช้ 4

เมื่อพูดถึง 3 ขาซึ่งก็ถือว่าเป็น Standard ในหลาย ๆ ด้านเช่นกัน เช่น ขาตั้งกล้องถ่ายรูปแบบ Tripod ขาตั้งโทรศัพท์ต่าง ๆ แต่ปัญหาที่ 3 ขาไม่เหมาะแก่การเอามาใช้กับจรวดนั้นเป็นเพราะว่าการใช้ 3 ขาหมายถึงความมั่นคงที่ลดลงและหากต้องการเพิ่มความมั่นคงของขาตั้งเราก็จำเป็นต้องเพิ่มความยาว ให้นึกถึงเวลาเราต้องขาตั้งกล้องถ้าเราหุบขามันมากเกินไปเพื่อเพิ่มความสูงมันก็จะเริ่มเสียสมดุลง่ายขึ้น ในขณะที่ถ้าเรากางมันสุดเลยมันก็จะมั่นคงในระดับนึงเลย หลักการเดียวกันก็ Apply กับจรวดเช่นกัน มันจะไม่เป็นปัญหาเลยถ้า Falcon 9 Booster สามารถทำ Return to Launch Site (RTLS) แล้วลงจอดที่นั้น เพราะว่าฐานลงจอดที่ Launch site นั้นกว้างพอสมควร แต่ปัญหามันเกิดเมื่อ Booster ต้องไปลงจอดที่ฐานลงจอดกลางทะเลอย่างบน ASDS หรือ Drone Ship ซึ่งหากอยากได้ความมั่นคงก็ต้องทำให้ขายาวขึ้น ขาที่ยาวขึ้นหมายถึงโอกาสที่ Booster จะพลาดการลงจอดมากขึ้นเช่นกัน แต่ถ้าใช้ขา 3 ขาที่สั้น ตัวจรวดก็มีโอกาสที่จะล้มหัวทิ่มลงทะเลอีก หรือทางเลือกสุดท้ายก็คือต้องขยายพื้นที่บน Drone Ship ให้สามารถรองรับขาลงจอดที่ยาวขึ้นด้วย ซึ่งก็เพิ่มต้นทุนอีกเช่นกัน จึงทำให้ 3 ขานั้นมีแต่เสียกับเสียทั้งเรื่องของต้นทุนและเรื่องของสมดุล
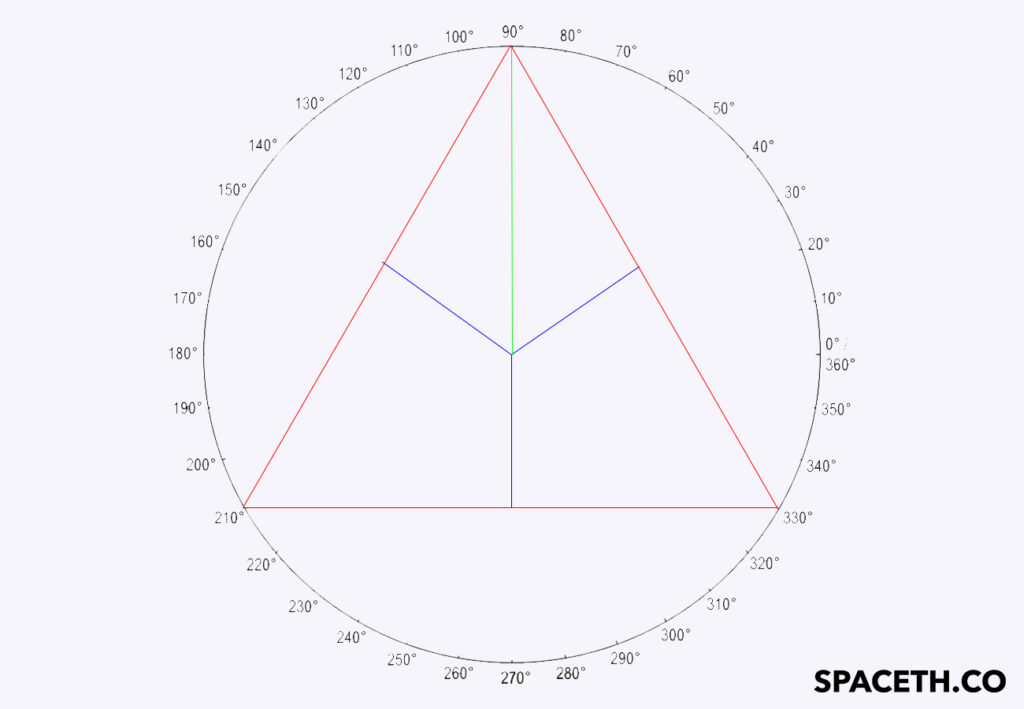
เมื่อกำหนดให้สามเหลี่ยม (เส้นสีแดง) เป็นสามเหลี่ยมด้านเท่าแล้วเส้นสีน้ำเงินคือ Apothems และเส้นสีเขียวคือรัศมี ซึ่ง Apothems คือเส้นที่ลากจากจุดศูนย์กลางของรูปเรขาคณิตไปยังด้านของ Polygon แล้วทำมุมตั้งฉากกับด้านนั้น ๆ (ในที่นี้คือทำมุมตั้งฉากกับเส้นสีแดง)
กำหนดให้รัศมี (เส้นสีเขียว) คือ ขาลงจอดและมีความยาว 1 หน่วย (เพื่อความง่ายในการคำนวณ) เมื่อดูตามภาพดังกล่าวข้างบนจะเห็นได้ว่ามุมของสามเหลี่ยมแต่ละมุม คือ 60 องศา รวมกันได้มุมภายใน 180 องศา ส่วน Apothems (เส้นสีน้ำเงิน) คือ จุดสมดุลในแต่ละด้านที่จะทำให้ขาตั้งและจรวดมีความมั่นคงที่สุดนั้นเอง เมื่อเรารู้รัศมีของขาตั้งแล้วนั้นก็คือ 1 นั้นเอง เราก็สามารถหา Apothem ด้วยกฎของไซน์ได้ (Law of sines) ดังนี้

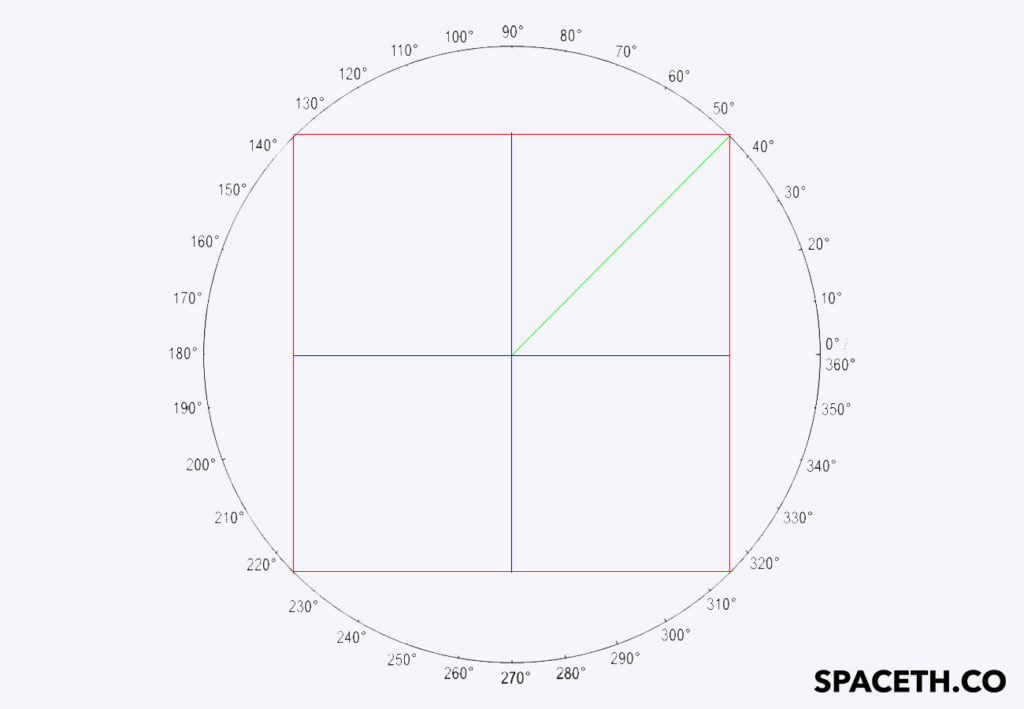
จากการคำนวณเราจะได้ความยาวของ Apothem แต่ละด้านเท่ากับ 0.5 หน่วย นั้นก็หมายความว่าเส้นสีน้ำเงินจะเป็นครึ่งหนึ่งของเส้นสีเขียว (สามารถลองทาบดูจากภาพได้ แต่อาจจะคลาดเคลื่อนไปเล็กน้อยจาก Error ระหว่างการวาด) ส่วนถ้าลองเป็นขาลงจอดแบบ 4 ขาเราก็จะได้โมเดลคล้าย ๆ กับแบบวงกลมเพียงแต่มี 4 มุมนั้นเอง
จากรูปกำหนดให้เส้นสีเขียวคือรัศมีของขาลงจอดส่วนเส้นสีฟ้า (Apothems) ก็คือเส้นสมดุลตามเดิมและเส้นสีแดงก็.. (มีไว้เฉย ๆ ให้วาดรูปง่ายขึ้น ฮา) เราก็จะได้มุมของเส้นสีเขียวที่ 45 องศา ใช้กฎของไซน์หาค่าความยาวของ Apothem

จะได้ค่า Apothem (a) ที่ 0.707 นั้นหมายความว่าเส้นสีฟ้าในรูปนี้จะสั้นกว่าเส้นสีเขียวเล็กน้อยนั้นเอง (สามารถลองทาบดูได้เลย) และหากทำแบบเดียวกันกับขาตั้งแบบ 5 ขาเราก็จะได้ Apothem (a) ที่ 0.809 และกับขาแบบ 6 ขาเราก็จะได้ Apothem (a) ที่ 0.866 เมือเราเอาค่าดังกล่าวมาเรียงกันจะได้แบบนี้
- 3 ขา (Triangle) จะได้ Apothem (a) ที่ 0.5
- 4 ขา (Square) จะได้ Apothem (a) ที่ 0.707 (เพิ่มขึ้นมาจาก 3 ขา 0.207 หน่วย)
- 5 ขา (Pentagon) จะได้ Apothem (a) ที่ 0.809 (เพิ่มขึ้นมาจาก 4 ขา 0.102 หน่วย)
- 6 ขา (Hexagon) จะได้ Apothem (a) ที่ 0.866 (เพิ่มขึ้นมาจาก 5 ขา 0.057 หน่วย)
จะเห็นได้ว่ายิ่งมีหลายขาลงจอดมากขึ้นค่า Apothem ก็ยิงเพิ่มขึ้นแต่การเพิ่มขึ้นไม่ได้เพิ่มขึ้นแบบ Linear แต่เป็นเพิ่มแบบ Inverse exponential นั้นหมายถึงตัวแปรซึ่งในที่นี้คือจำนวนของขาลงจอดที่เพิ่มขึ้นเท่าเดิมตลอดจะทำให้ค่าที่เปลี่ยนแปลงของ Apothem ลดน้อยลงหากสังเกตเราจะเห็นว่า จาก 3 ขา ไป 4 ขา Apothem เพิ่มขึ้นมาถึง 0.207 แต่พอจาก 4 ขา ไป 5 ขา Apothem เพิ่มขึ้นแค่ 0.102 และจาก 5 ขาไป 6 ขาเพิ่มขึ้นมาเพียง 0.057 หน่วยเท่านั้นเอง
โดยปกติเรารู้อยู่แล้วว่ายิ่งมีหลายขามากขึ้นจรวดก็จะยิ่งมั่นคงและสมดุลมากขึ้น เหมือนกับเก้าอี้ที่ยิงมีหลายขาก็ยิงมั่นคงหากเราลองไปนั่งเก้าอีก 3 ขาแล้วโยกก็มีโอกาสล้มได้ง่ายกว่าไปโยกเก้าอี้ 4 ขานั้นเองทำให้ค่า Apothem นี้ก็เป็น Factor ในการคำนวณทางฟิสิกส์ต่อไปเช่นกัน แต่ทั้งนี้เรายังไม่ได้คำนึงถึง Radius หรือรัศมีซึ่งก็คือเส้นสีเขียว ถ้าเราเพิ่มรัศมีละ แทนการเพิ่มจำนวนของขาแทนละ อย่างอาจจะเพิ่มความยาวของขาลงจอดแบบ 3 ขา
โจทย์ก็คือ ให้ r เป็นค่ารัศมีของขาลงจอดแบบ 3 ขา แล้วให้หา r ที่ทำให้ขาลงจอดอันนี้มีความสมดุลเท่ากับขาลงจอดแบบ 4 ขาที่รัศมี 1 หน่วย นั้นหมายความว่าเราจะต้องหาค่า r ที่ทำให้ขาลงจอดแบบ 3 ขามีค่า Apothem เท่ากับขาลงจอดแบบ 4 ขา (ที่มีรัศมี 1 หน่วย) โดยใช้กฎของไซน์ กำหนดให้ a คือ 0.707 นั้นก็คือค่า Apothem ของขาลงจอดแบบ 4 ขา (ที่มีรัศมี 1 หน่วย)

จากการคำนวณจะเห็นว่า SpaceX จะต้องสร้างขาลงจอดที่ยาวกว่าเดิมถึง 40% เพื่อที่จะให้มันมีความสมดุลเท่ากับแบบ 4 ขาที่รัศมีเพียง 1 หน่วยและเพราะว่ามันมี 3 ขา นั้นหมายถึงพื้นที่ลงจอดจะมากขึ้นถึง 120% ซึ่งพื้นที่ที่เพิ่มมากขึ้นนี้จะทำให้ SpaceX ต้องขยาย Drone Ship เพื่อป้องกันไม่ให้ Falcon 9 พลาดการลงจอดเพราะว่ายิงจรวดใหญ่มากเท่าไหร่แต่พื้นที่การลงจอดเท่าเดิมหมายถึงจรวดมีโอกาสพลาดมากขึ้น และเพราะว่ามันยาวขึ้นน้ำหนักก็มากขึ้นเช่นกันและมันก็ต้องแข็งแรงมาก ๆ ที่จะสามารถรับน้ำหนักของจรวดได้เพราะว่า 3 ขาก็เท่ากับน้ำหนักจรวดหาร 3 นั้นเอง ทำให้ 3 ขามีแต่เสียกับเสียนั้นเอง (แพงด้วย)
แต่เมื่อเราทำแบบเดียวกับการเทียบแบบ 4 ขา ให้เท่ากับแบบ 5 ขา ด้วยการเพิ่มรัศมีเราจะได้ผลที่ต่างออกไป โจทย์ก็คือแบบเดิมเลยคือหาค่า r ที่ทำให้ Apothem ของแบบ 4 ขาเท่ากับแบบ 5 ขา (ที่มีรัศมี 1 หน่วย) แต่เราสามารถใช้สูตร sin angle2 หารด้วย sin angle1 หาได้เลยและผลเราก็จะได้แบบนี้
- ขาลงจอดแบบ 3 ขาที่รัศมี Sin 45/Sin 30 (1.414) จะได้ Apothem เท่ากับขาลงจอดแบบ 4 ขาที่รัศมี 1 (Apothem = 0.707)
- ขาลงจอดแบบ 4 ขาที่รัศมี Sin 54/Sin 45 (1.114) จะได้ Apothem เท่ากับขาลงจอดแบบ 5 ขาที่รัศมี 1 (Apothem = 0.809)
- ขาลงจอดแบบ 5 ขาที่รัศมี Sin 60/Sin 54 (1.070) จะได้ Apothem เท่ากับขาลงจอดแบบ 6 ขาที่รัศมี 1 (Apothem = 0.866)
จะเห็นได้ว่าหากเราทำให้ขาลงจอดแบบ 4 ขายาวขึ้นเพียงแค่ 10% เราจะได้ขาลงจอดที่มีความสมดุลเทียบเท่าขาลงจอดแบบ 5 ขาที่รัศมี 1 หน่วยเลยทีเดียวซึ่งมี Apothem เท่ากับ 0.809 เพิ่มขึ้นจากเดิมมาถึง 0.102 หน่วย แต่เมื่อเราจะทำแบบเดียวกันด้วยการทำให้ขาแบบ 5 ขายาวขึ้นเพื่อให้เทียบเท่าขาแบบ 6 ขาที่รัศมี 1 หน่วยมันก็เริ่มไม่มีประสิทธิภาพซะแล้วกลายเป็นเสียตังค์เพิ่มโดยไม่จำเป็นเพราะว่าค่า Apothem นั้นเพิ่มแบบ Inverse exponential จึงทำให้ขาแบบ 4 ขาเป็นขาที่อยู่กึ่งกลางระหว่างประหยัดและประสิทธิภาพนั้นเอง เพราะการทำ 5 ขาก็ต้องเสียเงินออกแบบขาที่เล็กลงแต่แข็งแรงเพื่อเอาไปแปะไว้ด้านข้างที่มีพื้นที่จำกัดได้ ส่วนการทำแบบ 3 ขาก็ต้องทำขาที่ยาวขึ้นซึ่งเปลืองเงินมาก ๆ และก็ยังต้องไปขยายพื้นที่บน Drone Ship อีก จึงเป็นเหตุผลที่ Falcon 9 ใช้ขาลงจอดแบบ 4 ขานั้นเอง
Octagonal Engine Layout
และมากไปกว่านั้นเพราะว่าเครื่องยนต์ของ Falcon 9 หรือ Merlin Engine ทั้ง 9 ตัวนั้นเรียงกันแบบ Octagonal (Square-like) ก็คือมีเครื่องยนต์ตรงกลางอันหนึ่งส่วนอีก 8 เครื่องยนต์ล้อมรอบ

ซึ่งการใช้ขาลงจอดแบบ 4 ขาจะเป็นไปตามกฎสมมาตรของการวางตัวของเครื่องยนต์แบบนี้ (Engine Layout) แต่ถ้าวางแบบ 3 ขาเมื่อไหร่หรือ 5 ขา สมมาตรกับ Engine Layout ก็จะเพี้ยนทันทีนั้นเอง
เรียบเรียงโดย ทีมงาน SPACETH.CO