ใครก็ตามที่ติดตามข่าวการสำรวจดาวอังคาร ไม่ว่าจะผ่านภาพถ่ายที่ NASA ปล่อยออกมา หรือรายงานความคืบหน้าของยานสำรวจที่ลงพื้นผิว ยังไงก็ต้องเคยได้ยินชื่อ Mars Reconnaissance Orbiter หรือ MRO อยู่บ่อย ๆ ภาพที่คมกริบจนเรามองเห็นโรเวอร์คันเล็ก ๆ วิ่งอยู่บนพื้นผิวดาวอังคาร ภาพร่องรอยฝุ่นพัดที่ทอดยาวเป็นกิโลเมตร หรือแผนที่สามมิติของชั้นน้ำแข็งใต้ผิว ทุกอย่างนั้นล้วนเกิดขึ้นเพราะยานลำนี้ บทความนี้เราจะพาทุกคนเจาะลึกไปในเรื่องราวของ MRO และตอบคำถามสำคัญว่า ทำไมมันถึงถูกยกให้เป็นยานที่ “รับจบ” ภารกิจดาวอังคารเกือบทั้งหมดในสองทศวรรษที่ผ่านมา
ย้อนกลับไปช่วงต้นทศวรรษ 2000 NASA เพิ่งเริ่มกลับมามีความมั่นใจหลังจากยุคที่ภารกิจดาวอังคารล้มเหลวไปหลายครั้งจนต้องปฏิวัติระเบียบเดิม ๆ Faster, Better, Cheaper ถอดบทเรียนสำคัญของ NASA จากนโยบายยัดเยียดเพื่อเป็นให้ได้ทุกอย่าง เช่น Mars Climate Orbiter ที่บึ้มไปเพราะปัญหาหน่วยวัด หรือ Mars Polar Lander ที่สูญหายหลังการลงจอดไม่สำเร็จ ภารกิจที่ฟื้นความเชื่อมั่นกลับมาคือ Mars Global Surveyor และ 2001 Mars Odyssey ซึ่งให้ข้อมูลพื้นฐานของดาวอังคารในระดับที่ไม่เคยมีมาก่อน แต่ข้อมูลเหล่านี้ยังอยู่ในสเกล “แผนที่ภาพรวม” มากกว่าที่จะตอบคำถามใหม่ ๆ ที่นักวิทยาศาสตร์อยากรู้ เช่น ที่ใดเคยมีน้ำของเหลวจริง ๆ หรือพื้นที่ไหนปลอดภัยพอสำหรับการลงจอดของภารกิจถัดไป

และยิ่งไปกว่านั้น NASA เริ่มมีแผน “กองทัพดาวอังคาร” จริง ๆ ไม่ใช่ยานเดี่ยว ๆ อีกต่อไป ยกตัวอย่างเช่น Spirit และ Opportunity กำลังทำงานบนผิว ดาวอังคาร ในขณะที่ Phoenix Lander ถูกวางคิวลงขั้วเหนือ และในอนาคต Curiosity รวมถึง Perseverance ก็กำลังจะตามมา ปัญหาคือ ยานพวกนี้ส่งข้อมูลตรงมายังโลกไม่ได้เยอะนัก ขีดจำกัดของจานสื่อสารและพลังงานบังคับให้ต้องมี “เสาสัญญาณลอยฟ้า” ที่คอยรับ–ส่งข้อมูลปริมาณมหาศาลกลับโลก
MRO จึงถูกสร้างขึ้นมาเพื่อตอบโจทย์นี้โดยตรง มันไม่ใช่ยานที่ออกแบบมาเพื่อเก็บข้อมูลเฉพาะทางด้านใดด้านหนึ่ง แต่เป็น ยานลูกผสมที่รวมเอาบทบาททั้ง “นักวิทยาศาสตร์ภาคสนาม” และ “โครงสร้างพื้นฐานด้านเครือข่าย” เข้าไว้ด้วยกัน ในมุมมองของเรา จุดนี้เองที่ทำให้ MRO แตกต่างตั้งแต่วันแรก มันคือ Infrastructure ที่ทำให้ทุกยานอื่น ๆ ทำงานได้ ไม่ใช่แค่เครื่องมือวิจัยที่อยู่โดด ๆ
การเดินทางสู่ดาวอังคารและเทคนิคการเข้าสู่วงโคจรแบบใหม่
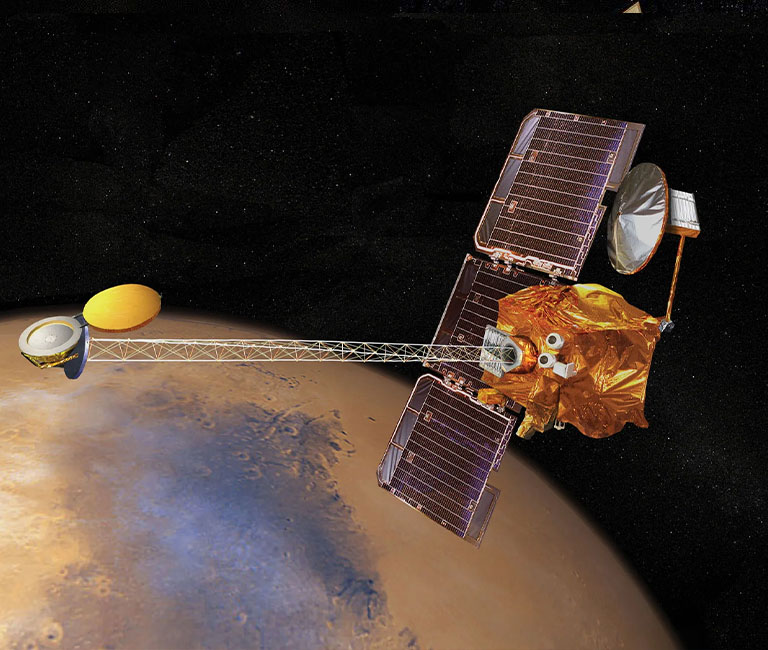
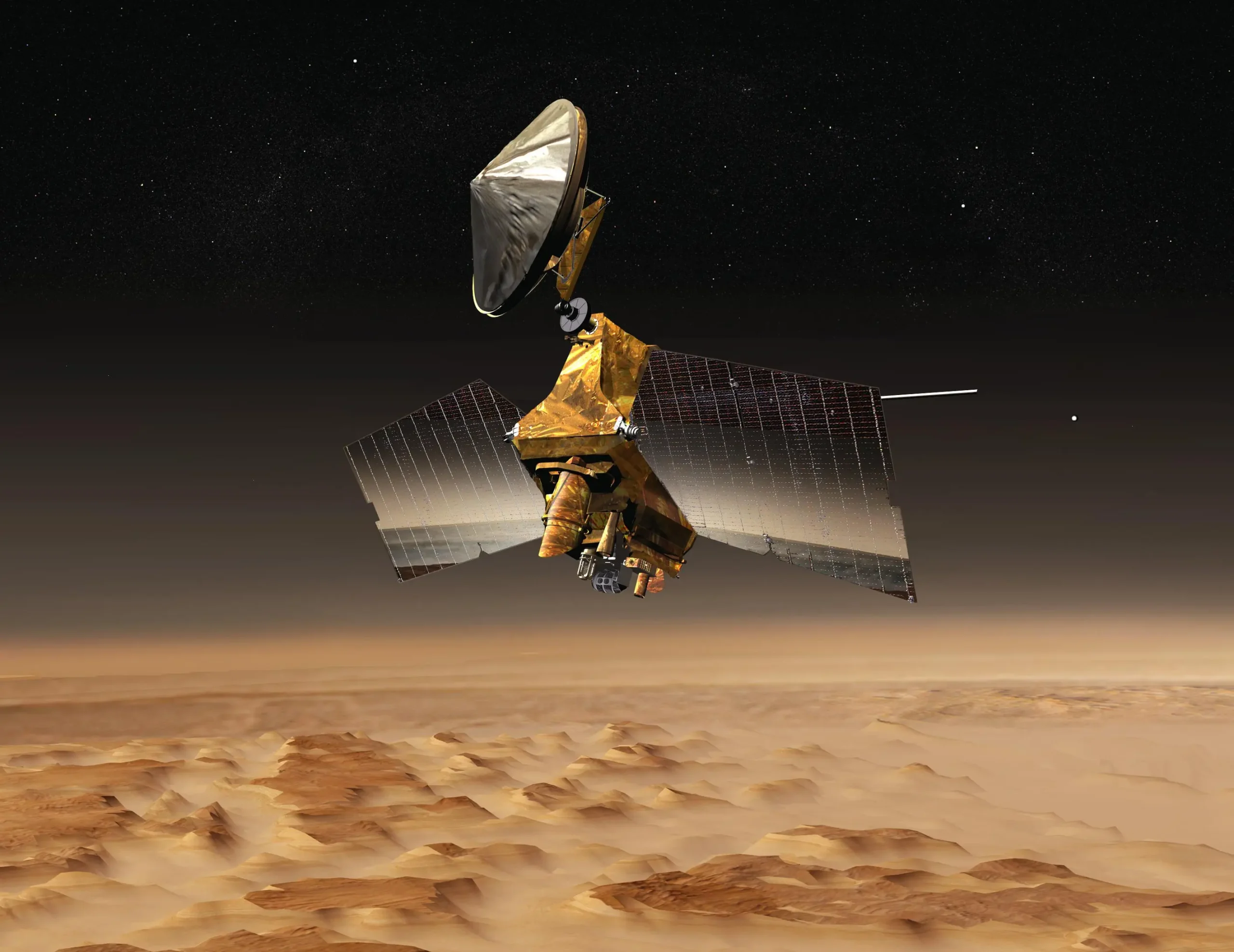
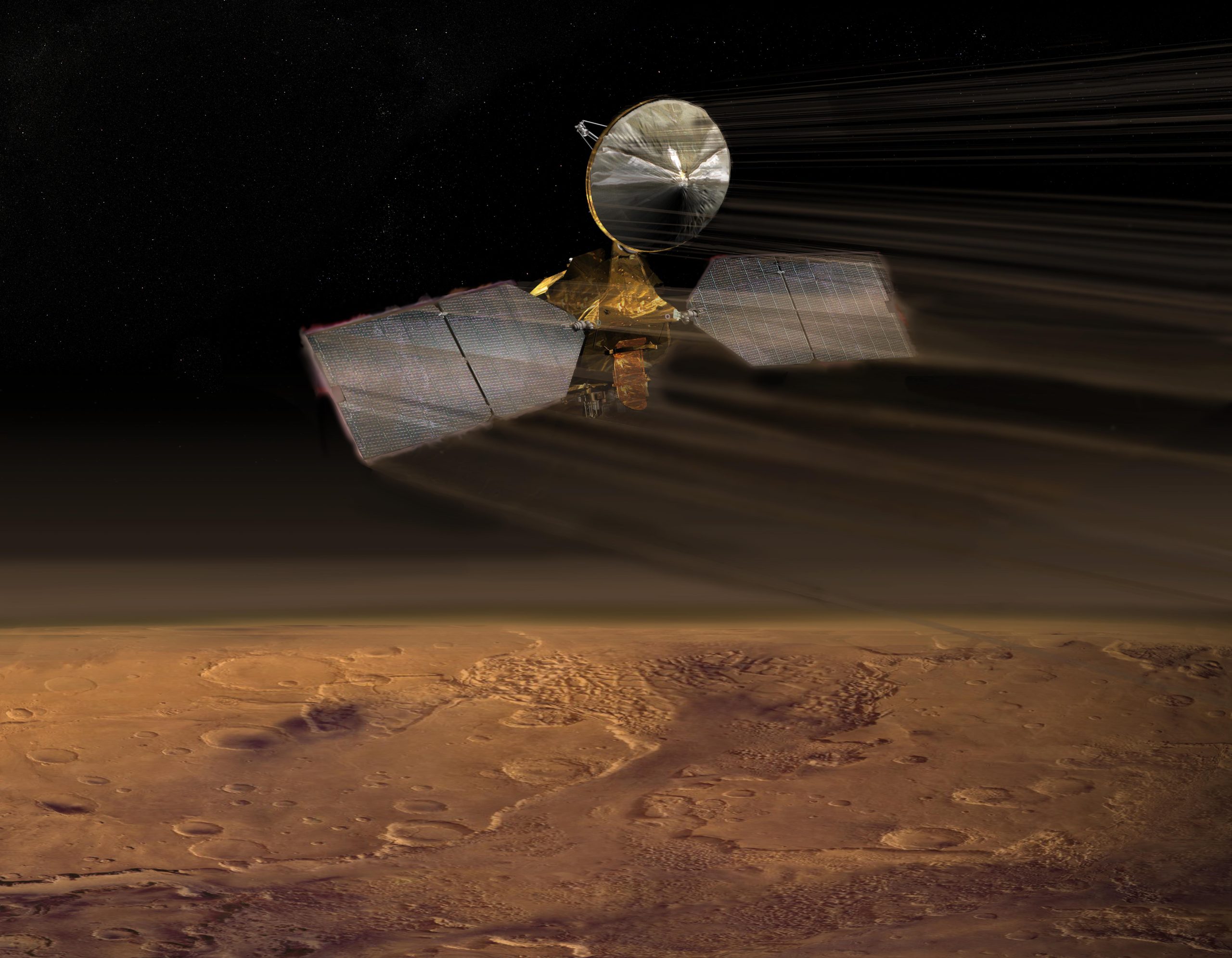
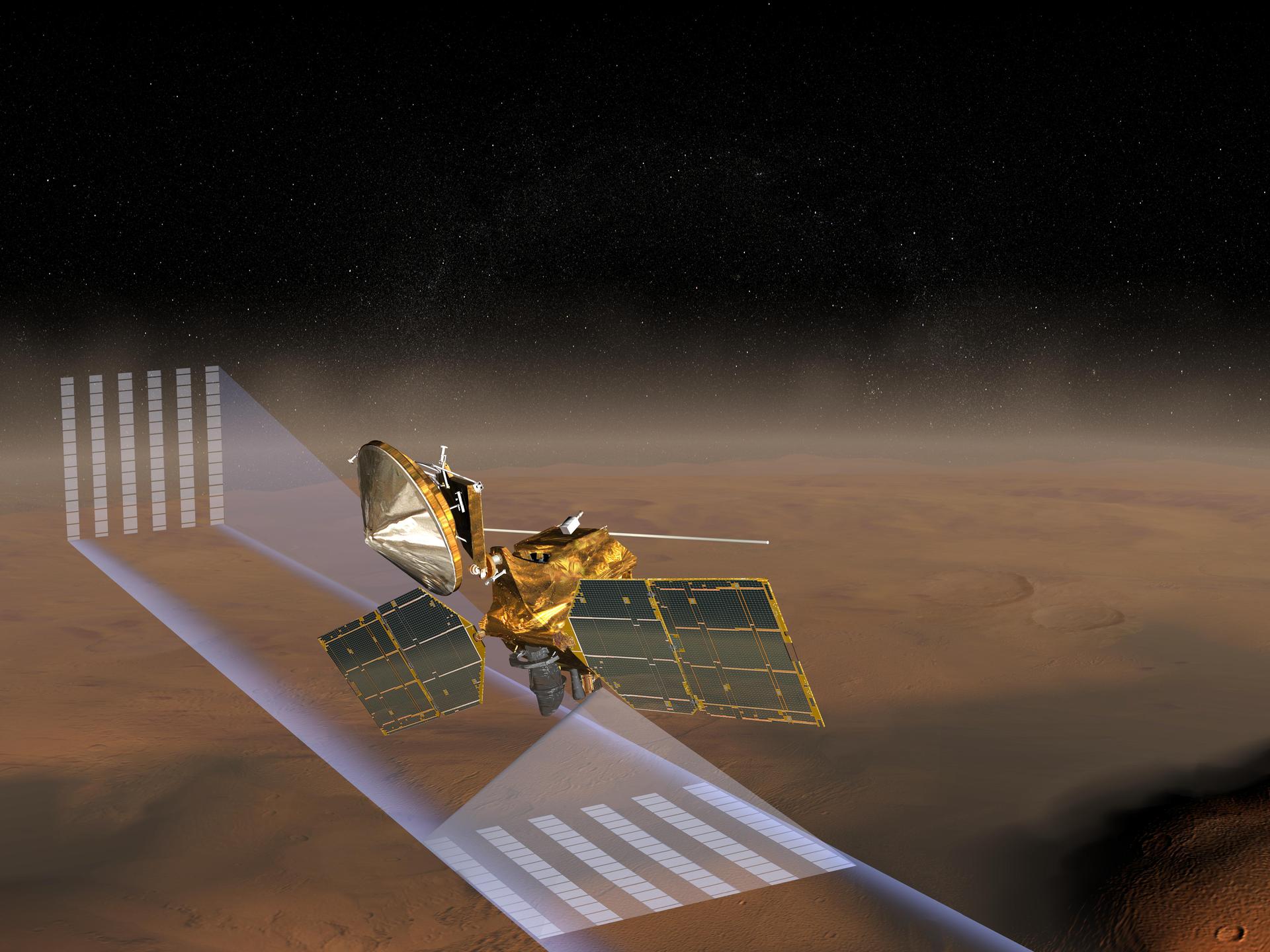
MRO มีมวลรวมตอนปล่อยราว 2,180 กิโลกรัม และใช้พลังงานจากแผงโซลาร์เซลล์สองข้างกางออกกว้างถึง 10 เมตร จุดเด่นที่ทำให้มันแตกต่างคือการ “บรรจุ” เครื่องมือหลากหลายชุดลงไปในแพลตฟอร์มเดียว ทั้งกล้องถ่ายภาพความละเอียดสูง HiRISE, กล้องกลางหรือ CTX, สเปกโตรมิเตอร์ CRISM, เรดาร์ทะลุพื้นผิว SHARAD, กล้องตรวจสอบสภาพอากาศ MARCI และที่มักถูกมองข้ามแต่สำคัญที่สุดคือ Electra UHF Relay ที่ออกแบบมาโดยเฉพาะเพื่อทำหน้าที่เป็น “สถานีทวนสัญญาณ” สำหรับยานบนผิวดาวอังคาร
คิดนี้ไม่ต่างจากการสร้าง เซิร์ฟเวอร์กลางบนดาวอังคาร ที่รองรับการเชื่อมต่อของทุกอุปกรณ์รอบตัว การออกแบบเช่นนี้ทำให้ MRO ไม่ได้ถูกคิดให้เป็น “ยานวิทยาศาสตร์เฉพาะกิจ” แต่เป็น Infrastructure Orbiter ตั้งแต่วันแรก มันคือเครือข่ายไร้สาย บวกกล้องถ่ายรูประดับ Google Earth รวมในแพ็กเกจเดียว
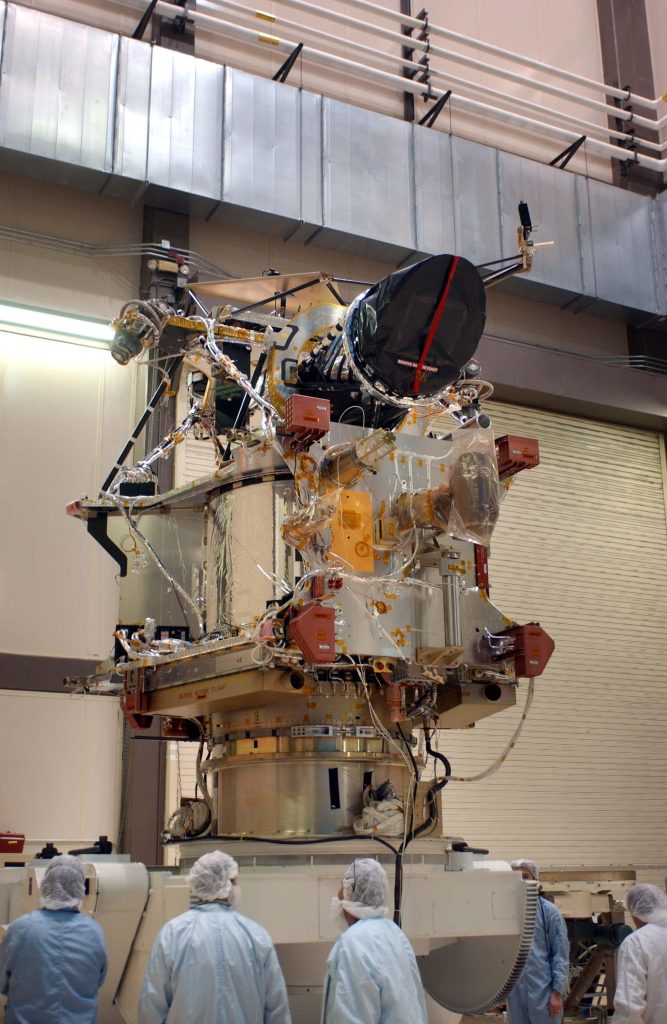

เบื้องหลังความสำเร็จของ MRO คือการผสมผสานระหว่าง NASA กับภาคอุตสาหกรรมอวกาศสหรัฐฯ NASA Jet Propulsion Laboratory หรือ JPL คือผู้ที่รับหน้าที่บริหารโครงการ ออกแบบระบบการทำงาน และควบคุมปฏิบัติการหลังจากยานเข้าสู่วงโคจร ส่วนบริษัท Lockheed Martin Space Systems ในโคโลราโดคือผู้สร้างตัวยานอวกาศทั้งลำ ตั้งแต่โครงสร้าง ระบบไฟฟ้า ระบบขับดัน ไปจนถึงการประกอบขั้นสุดท้ายและการทดสอบเต็มรูปแบบ

ในเชิงสัญญา MRO ถูกพัฒนาในโครงการ NASA Scout Program ซึ่งเป็นแนวคิดที่ให้โครงการดาวอังคารรุ่นใหม่ ๆ มีความคล่องตัวและใช้ทรัพยากรอย่างคุ้มค่า Lockheed Martin ได้รับสัญญาในการสร้างตัวยานและการประกอบ Payload ทั้งหมด ขณะที่ทีมวิจัยจากมหาวิทยาลัยต่าง ๆ ได้รับหน้าที่พัฒนาเครื่องมือเฉพาะ เช่น กล้อง HiRISE จาก University of Arizona, สเปกโตรมิเตอร์ CRISM จาก Johns Hopkins University Applied Physics Laboratory และเรดาร์ SHARAD จาก Italian Space Agency
MRO ถูกปล่อยขึ้นเมื่อวันที่ 12 สิงหาคม 2005 ด้วยจรวด Atlas V จากฐานปล่อย SLC-41 ที่แหลมคะเนอเวอรัล ในฟลอริดา “And Liftoff Of The Atlas V Rocket, Carrying MRO To Survey Mars For The Deepest Insights Into Its Mysterious Evolution.” หลังจากเดินทางในเส้นทาง Hohmann Transfer ราวเจ็ดเดือนครึ่ง มันก็ถึงดาวอังคารและต้องเผชิญกับหนึ่งในขั้นตอนที่เสี่ยงที่สุดในภารกิจสำรวจดาวเคราะห์ใด ๆ Mars Orbit Insertion หรือ MOI

ในวันที่ 10 มีนาคม 2006 เครื่องยนต์หลักของ MRO ต้องเบิร์นอย่างต่อเนื่องเกือบ 27 นาที เพื่อลดความเร็วพอที่จะถูกแรงโน้มถ่วงของดาวอังคารดึงเข้าสู่วงโคจร ขั้นตอนนี้คือ All-or-Nothing หากเครื่องยนต์ดับก่อนเวลาหรือเบิร์นไม่พอ ยานอาจพุ่งเลยดาวอังคารออกไปสู่อวกาศลึก และภารกิจจะจบลงทันที
หลังจากเข้าสู่วงโคจร MRO ยังไม่สามารถเริ่มงานวิทยาศาสตร์ได้เลย เพราะวงโคจรแรกนั้นรีเกินไป จุดไกลสุดห่างออกไปกว่า 45,000 กิโลเมตร ทีมวิศวกรเลือกใช้เทคนิค Aerobraking หรือการใช้แรงเสียดทานของบรรยากาศดาวอังคารเป็นเบรกเพื่อลดความสูงวงโคจรแทนที่จะใช้เชื้อเพลิง นานกว่า 6 เดือน MRO ต้องค่อย ๆ จุ่มเข้าไปในชั้นบรรยากาศที่เบาบางทุก ๆ รอบ ควบคุมมุมท่าทางและความลึกอย่างละเอียดเพื่อไม่ให้เกิดความร้อนเกินหรือแรงดันเกินโครงสร้าง แต่ในขณะเดียวกันก็ต้องลดความเร็วพอสมควรให้วงโคจรกลายเป็น วงรีต่ำ 255–320 กิโลเมตร ซึ่งเหมาะสมต่อการถ่ายภาพความละเอียดสูงและการทำงานของเครื่องมือทั้งหมด
เราอาจบอกได้ว่า Aerobraking เป็นช่วงเวลาที่สะท้อน “บุคลิก” ของ MRO ได้ชัดที่สุด เพราะมันคือการแลก เวลา กับ ความทนทานระยะยาว ยอมเสี่ยงหลายเดือนเพื่อเก็บเชื้อเพลิงไว้ใช้ในอนาคตแทน และนี่คือเหตุผลว่าทำไม MRO ถึงยังทำงานได้แม้ผ่านไปเกือบ 20 ปี
เดือนพฤศจิกายน 2006 หลังจากเสร็จสิ้น Aerobraking และปรับวงโคจรเรียบร้อย MRO ก็เริ่มเข้าสู่ Science Phase อย่างเป็นทางการ นับแต่นั้นเป็นต้นมา มันก็กลายเป็นตาจากบนฟ้าที่จับจ้องดาวอังคารทุกวัน ข้อมูลที่ส่งกลับมาไม่ได้มีแค่ “ภาพสวย” แต่เป็นข้อมูลที่กำหนดทิศทางของทุกภารกิจถัดมา จุดเปลี่ยนสำคัญของ MRO คือการผ่าน Aerobraking ได้สำเร็จ เพราะหากวันนั้นมีอะไรผิดพลาด เราอาจจะไม่ได้เห็นภาพจาก HiRISE, ไม่ได้ใช้ SHARAD มองหาน้ำแข็งใต้ผิว และภารกิจอย่าง Curiosity หรือ Perseverance อาจไม่เคยมีแผนที่ละเอียดพอที่จะลงจอดอย่างปลอดภัยเลยก็ได้
เครื่องมือที่ครบวงจรต่อการสำรวจดาวอังคาร
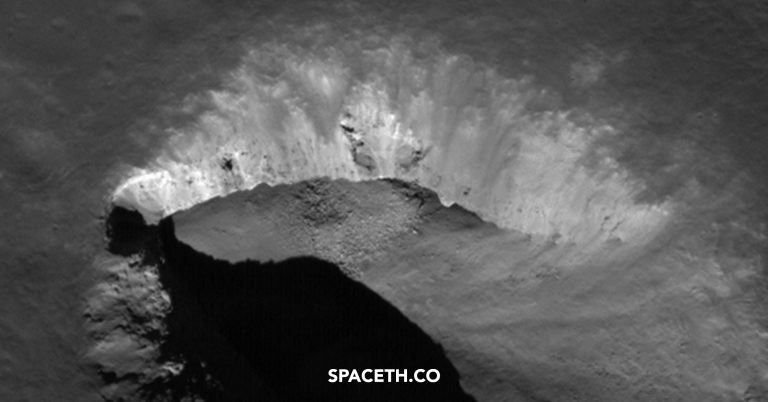
พระเอกของ MRO คือกล้อง HiRISE หรือ High Resolution Imaging Science Experiment ขนาดกระจก 0.5 เมตร ให้ความละเอียดภาพถึง 25–30 เซนติเมตรต่อพิกเซล จากความสูงกว่า 250 กิโลเมตร ถ้าเปรียบกับการถ่ายภาพโลก มันคือการมองเห็นรถยนต์บนถนนจากวงโคจรในอวกาศ สิ่งนี้เปลี่ยนเกมโดยสิ้นเชิง เพราะ HiRISE ไม่ได้ถ่ายรูปเพื่อความสวย แต่มันกลายเป็น ฐานข้อมูลเชิงวิศวกรรม ที่ NASA ใช้เลือกจุดลงจอดของ Phoenix, Curiosity, Perseverance และแม้กระทั่งช่วยติดตามเส้นทางที่โรเวอร์ขับไปในแต่ละวัน เรามองว่า HiRISE คือ “Google Earth ของดาวอังคาร” ที่ไม่ใช่ใครอยากใช้ก็ได้ แต่ทุกภารกิจต้องใช้ เรื่องราวก่อน ๆ ที่เราเคยเล่าไปเกี่ยวกับภาพจาก MRO สามารถตามอ่านได้จาก JPL พัฒนา AI ที่สามารถตรวจจับหลุมอุกกาบาตบนดาวอังคารจากข้อมูลของยาน MRO ได้




ถ้าจะมี HiRISE เป็นซูเปอร์ซูม ก็คงต้องมีเครื่องมือที่ทำหน้าที่เป็นเลนส์มุมกว้างเพื่อเติมบริบท และนั่นคือ CTX หรือ Context Camera ภาพจาก CTX ไม่ละเอียดเท่า HiRISE แต่กว้างพอจะทำให้เรามองเห็นว่าพื้นที่หนึ่ง ๆ อยู่ในสภาพแวดล้อมแบบไหน ส่วน MARCI หรือ Mars Color Imager คือ “นักพยากรณ์อากาศประจำดาวอังคาร” มันถ่ายภาพดาวอังคารทั้งดวงในหลายแถบคลื่น ทำให้เราเห็นการก่อตัวของพายุฝุ่น การเปลี่ยนแปลงตามฤดูกาล และบันทึกพายุฝุ่นที่เคยปกคลุมดาวทั้งดวงจนภารกิจอย่าง Opportunity ต้องดับไป MARCI คือเครื่องมือที่ทำให้ MRO ไม่ใช่แค่สายตาของนักธรณีวิทยา แต่เป็น “นักพยากรณ์อากาศประจำดาวเคราะห์” ไปพร้อมกันด้วย
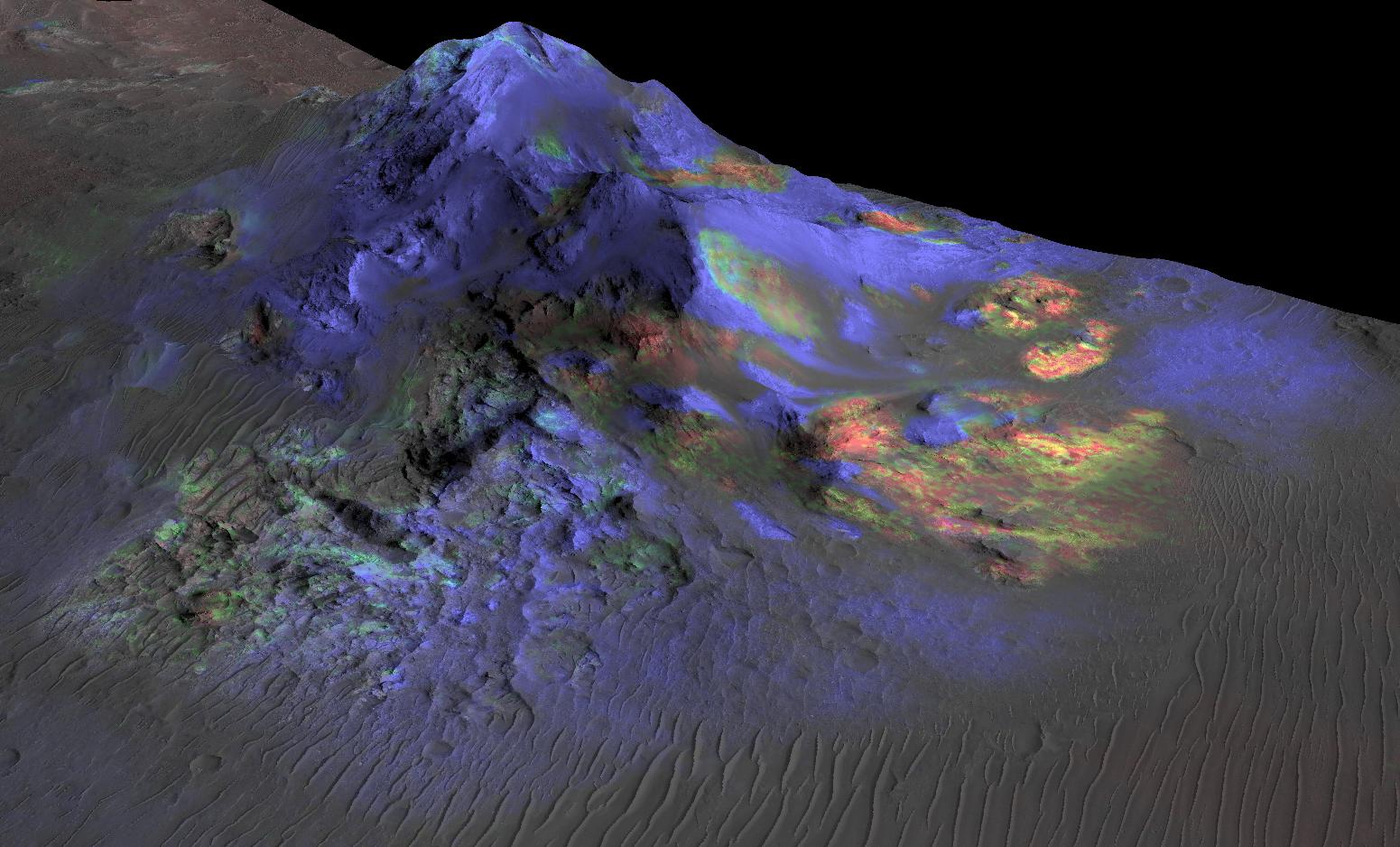
ในขณะที่ CRISM หรือ Compact Reconnaissance Imaging Spectrometer for Mars เป็นสเปกโตรมิเตอร์ที่มองหาลายเซ็นของแร่และโมเลกุลบนพื้นผิว เรียกว่าการทำ Miniral Mapping มันคือเครื่องมือที่ช่วยยืนยันการมีอยู่ของ แร่ไฮเดรตและคาร์บอเนต หลักฐานสำคัญที่บอกว่าดาวอังคารเคยมีน้ำในอดีต ถึงแม้ CRISM จะเลิกใช้งานไปในช่วงหลังเพราะระบบทำความเย็นหมดอายุ แต่มันได้สร้าง คลังข้อมูลแร่ระดับโลก ของดาวอังคารเอาไว้ ซึ่งจนถึงทุกวันนี้ยังเป็นแหล่งอ้างอิงสำคัญ เรามองว่ามรดกของ CRISM คือการเปลี่ยนคำถามจาก “เคยมีน้ำไหม” เป็น “น้ำอยู่ที่ไหน อยู่ในรูปอะไร และเกิดขึ้นเมื่อไร”
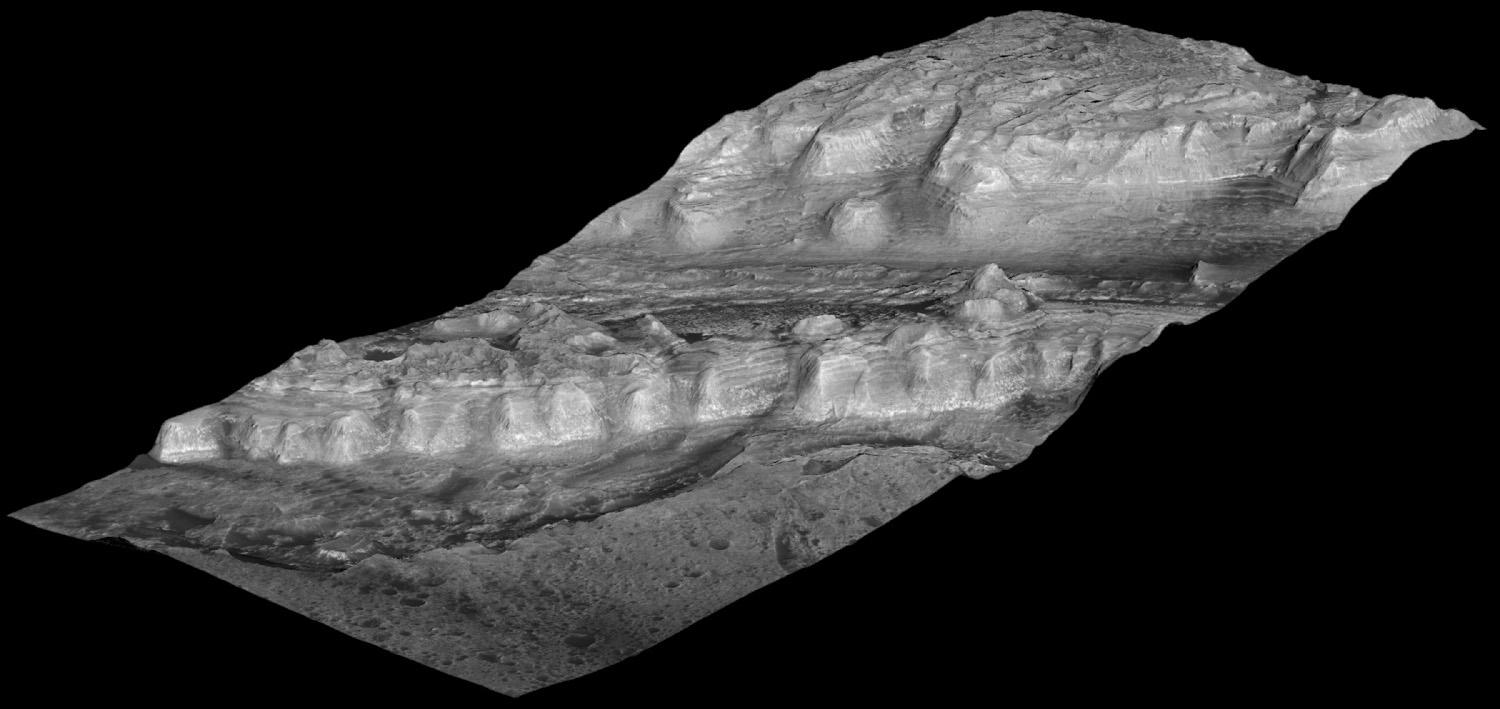
SHARAD หรือ Shallow Radar คือเรดาร์ที่ยิงคลื่นลงไปใต้ผิวดาวอังคารแล้วสะท้อนกลับมา มันสามารถตรวจสอบโครงสร้างชั้นตะกอนและน้ำแข็งได้ลึกถึงกว่าหนึ่งกิโลเมตร การค้นพบสำคัญคือการพบ แผ่นน้ำแข็งขนาดใหญ่ใน Utopia Planitia และชั้นน้ำแข็งที่บันทึกประวัติศาสตร์ภูมิอากาศของดาวอังคารไว้เหมือนวงปีไม้บนโลก SHARAD คือเครื่องมือที่ทำให้ MRO ไม่ได้มองแค่ผิวของดาวอังคาร แต่มองลงไปถึง “ชั้นใต้ผิว” เพื่ออ่านประวัติศาสตร์ภูมิอากาศที่ซ่อนอยู่
สุดท้ายคือ Electra UHF Relay เครื่องมือที่แทบไม่เคยขึ้นหน้าสื่อ แต่มันคือหัวใจที่ทำให้ภารกิจพื้นผิวทั้งหมดดำเนินต่อได้ ยาน Rover หรือ Lander บนผิวดาวอังคารไม่สามารถส่งข้อมูลกลับโลกโดยตรงได้มากพอ พวกมันจึงต้องส่งข้อมูลขึ้นมาให้ MRO แล้ว MRO จึงเป็นตัวกลางที่ส่งข้อมูลกลับมายังโลกด้วยอัตราสูงกว่าหลายสิบเท่า Electra คือสิ่งที่ทำให้ MRO กลายเป็น “ยานรับจบ” อย่างแท้จริง เพราะถ้าไม่มีมัน ภารกิจอย่าง Perseverance คงไม่สามารถส่งคลิปเสียงจากดาวอังคารกลับมาได้ และ Curiosity อาจไม่สามารถส่งภาพ Gigapixel ให้เรานั่งซูมเล่นบนโลก
การค้นพบที่เปลี่ยนมุมมองที่เรามีต่อดาวอังคาร
ก่อนหน้าที่ MRO จะไปถึง หลักฐานเรื่อง “น้ำบนดาวอังคาร” ยังอยู่ในระดับภาพรวม ว่ามีร่องรอยธารน้ำโบราณหรือหุบเขาที่เหมือนเคยถูกน้ำกัดเซาะ แต่ไม่มีอะไรที่พิสูจน์ได้ตรง ๆ ว่า องค์ประกอบของแร่และโครงสร้างใต้ผิว สนับสนุนเรื่องนี้จริงหรือไม่ MRO เปลี่ยนเกมด้วย CRISM และ SHARAD ในขณะที่ CRISM ตรวจเจอแร่ไฮเดรตและคาร์บอเนตที่บ่งชี้การมีน้ำในอดีต ขณะที่ SHARAD ใช้เรดาร์เจาะลงไปเห็นชั้นน้ำแข็งหนาใต้ผิวดิน หลักฐานสำคัญคือการค้นพบน้ำแข็งปริมาณมหาศาลใน Utopia Planitia ซึ่งเทียบได้กับน้ำแข็งที่มากพอจะปกคลุมพื้นที่สหรัฐอเมริกาทั้งประเทศ เรามองว่าความสำเร็จนี้ทำให้ “น้ำบนดาวอังคาร” ไม่ใช่เพียงข้อสันนิฐาน แต่กลายเป็นความจริงที่ไม่มีใครเถียงได้อีกต่อไป
หนึ่งในการค้นพบที่โด่งดังที่สุดคือการถ่ายภาพ Recurring Slope Lineae หรือ RSL เส้นมืด ๆ ที่ปรากฏบนไหล่เขาและขอบหลุมอุกกาบาตในบางฤดูกาล ตอนแรกนักวิทยาศาสตร์ตีความว่ามันอาจเป็นน้ำเกลือไหล ข่าวใหญ่ในปี 2015 ที่ทำให้คนทั้งโลกตื่นเต้นว่าดาวอังคารอาจยังมีน้ำของเหลวอยู่
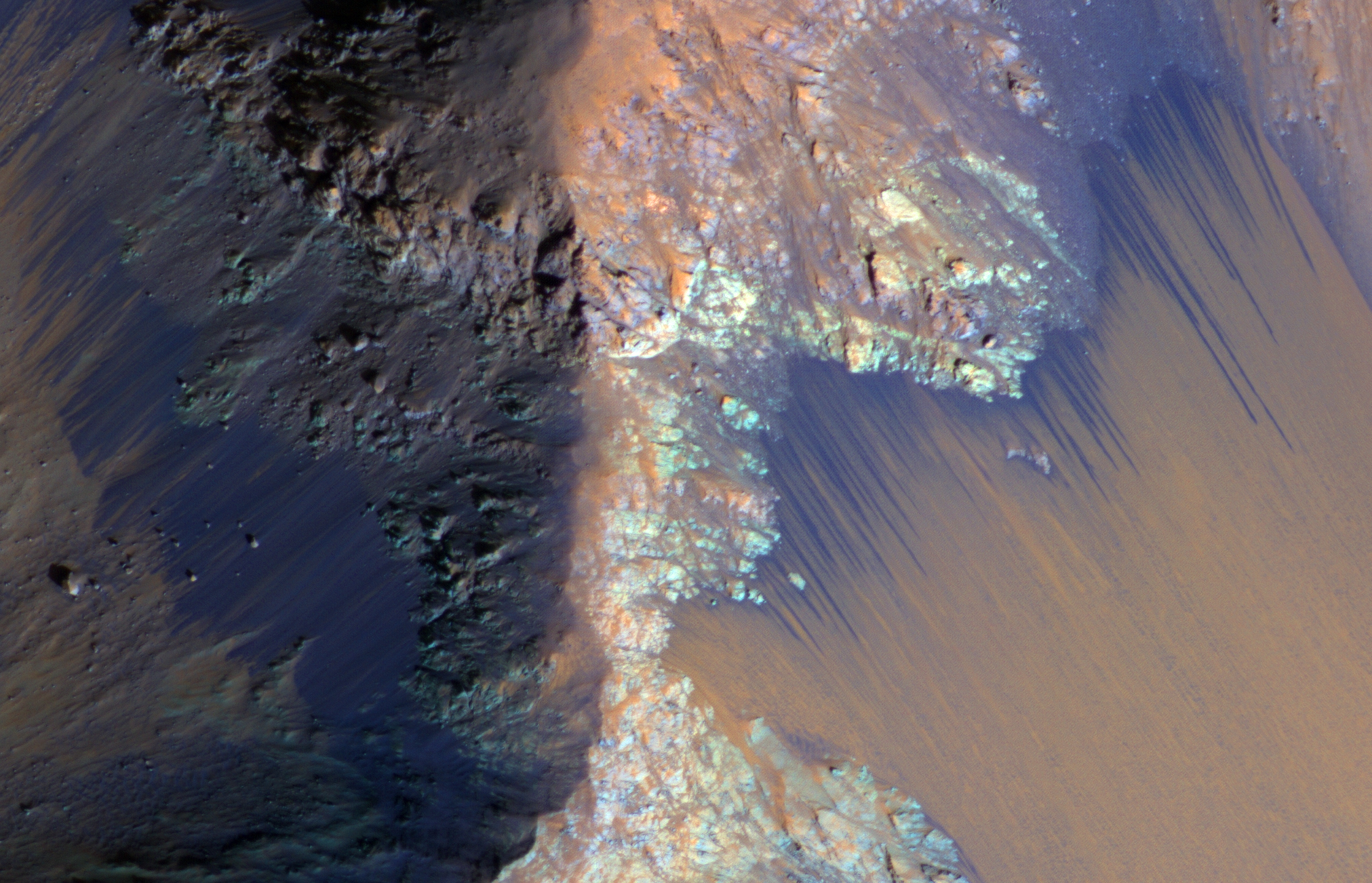
แต่เมื่อเวลาผ่านไป ข้อมูลจาก HiRISE และการจำลองทางกายภาพชี้ว่า RSL มีพฤติกรรมสอดคล้องกับ การไหลของวัสดุแห้งหรือ Granular Flow มากกว่า เช่น เม็ดทรายที่ไหลลงมาตามความลาดชัน ผลลัพธ์นี้เหมือนกับ “พลิกคำตอบ” แต่เรามองได้ว่านี่คือเสน่ห์ของ MRO เพราะมันไม่เพียงแต่สร้างความตื่นเต้น มันยังสร้าง บทเรียนเชิงวิทยาศาสตร์ ที่ชัดว่า ภาพที่ละเอียดขึ้นอาจทำให้เราต้องทบทวนสมมติฐานเก่า ๆ ด้วย
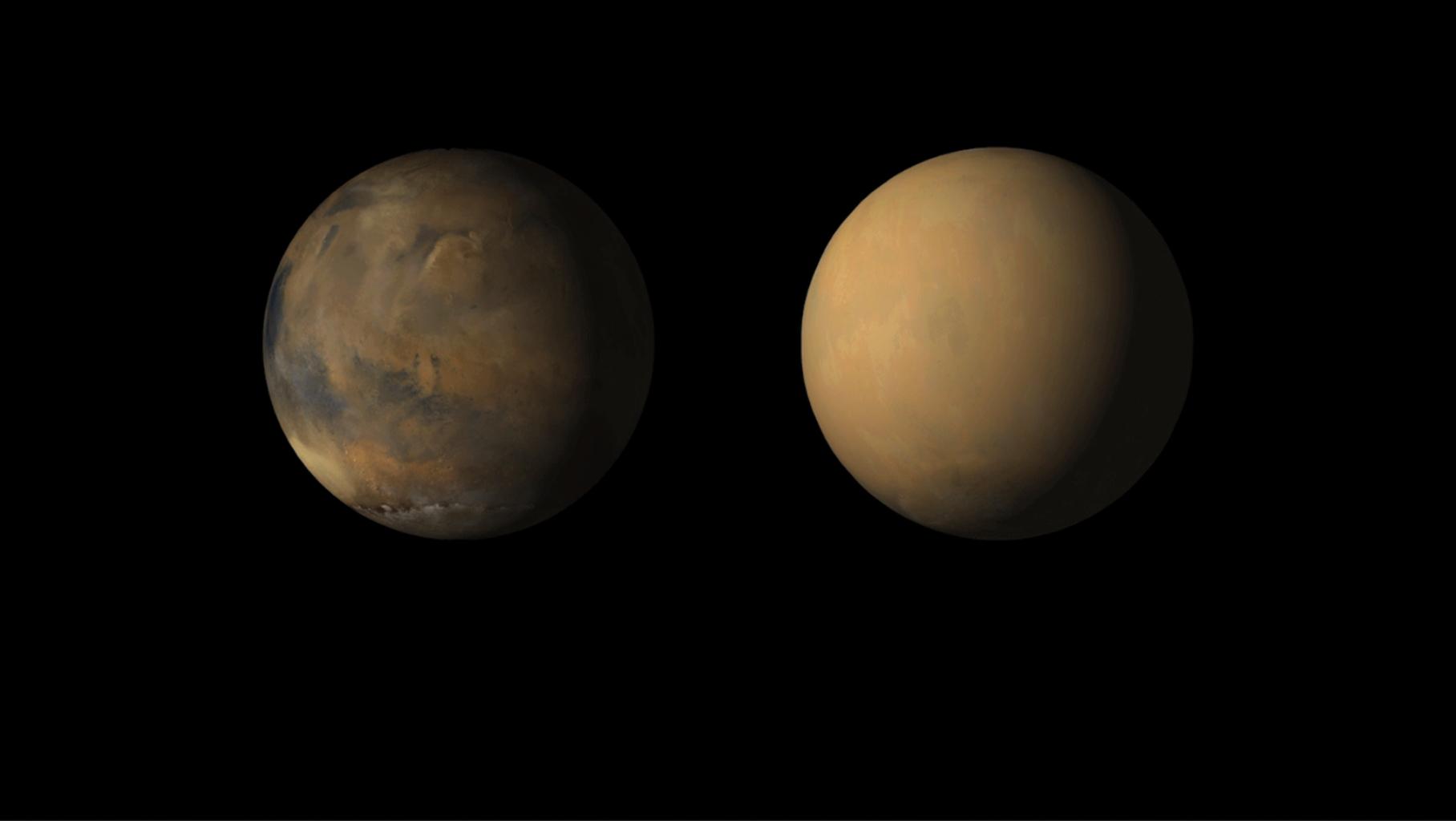
ในปี 2018 ดาวอังคารเผชิญกับพายุทราบที่ปกคลุมดาวทั้งดวงจน ยาน Opportunity ต้องจบชีวิตลง โดย MRO กลายเป็นยานที่บันทึกวิวัฒนาการของพายุฝุ่นครั้งนั้นอย่างละเอียด ด้วยกล้อง MARCI ที่ถ่ายภาพทั้งดาวทุกวัน นักวิทยาศาสตร์สามารถเห็นการก่อตัวและการขยายตัวของพายุ จนเข้าใจว่าทำไมมันถึงลุกลามจากพายุท้องถิ่นเล็ก ๆ ไปสู่การครอบคลุมดาวทั้งดวง เรามองว่าการมีบันทึกนี้ทำให้การสำรวจดาวอังคารยุคใหม่มี “พยากรณ์อากาศ” ที่ไม่ต่างจากโลก ถ้าไม่มี MRO เราอาจไม่รู้ด้วยซ้ำว่าพายุระดับดาวทั้งดวงเกิดขึ้นได้อย่างไร
อีกจุดที่ทำให้ MRO กลายเป็นยานขวัญใจคือภาพถ่ายแบบ “จับได้คาหนังคาเขา” เช่น ตอนที่ HiRISE ถ่ายภาพ Phoenix Lander กำลังลอยลงมาพร้อมร่มชูชีพในปี 2008 หรือภาพ Curiosity Rover ช่วง Entry, Descent, and Landing ที่แสดงให้เห็นยานกำลังโรยตัวลงพื้น มันคือหลักฐานชิ้นสำคัญที่คอยบอกว่าเหตุการณ์สำคัญเกิดขึ้นจริงตามที่ตั้งใจหรือไม่ โดยเราได้เล่าไปในบทความ รวมเหตุการณ์ยานอวกาศถ่ายภาพกันเองบนวงโคจรดาวอังคาร ภาพเหล่านี้ไม่ใช่แค่ประวัติศาสตร์หรือการตลาดแต่มันคือข้อมูลวิศวกรรมที่ NASA ใช้ประเมินว่าระบบลงจอดทำงานตามที่ออกแบบไว้หรือไม่ด้วย แล้วนี่ก็ไม่ใช้เรื่องบังเอิญเพราะ NASA ตั้งใจให้ยาน MRO โคจรอยู่ในบริเวณที่สามารถจับภาพสำคัญเหล่านี้ได้นั่นเอง
ยานอวกาศรับจบบนดาวอังคาร
ยานอวกาศต่าง ๆ บนดาวอังคารเช่น Phoenix, Curiosity, InSight หรือ Perseverance ต่างก็มีปัญหาคล้ายกันหมด คือมันไม่สามารถยิงข้อมูลตรงมายังโลกได้ในปริมาณมากพอ อัตราการส่งข้อมูลจากพื้นผิวสู่โลกตรง ๆ นั้นต่ำเกินกว่าจะส่งภาพความละเอียดสูงหรือสตรีมข้อมูลวิทยาศาสตร์เป็นจำนวนมหาศาลได้ MRO จึงทำหน้าที่เป็นยาน Relay ที่คอยรับข้อมูลจากยานบนผิวผ่านคลื่น UHF แล้วส่งต่อมายังโลกด้วยจานสื่อสาร X-band ขนาด 3 เมตร อัตราส่งข้อมูลสูงสุดที่ MRO ทำได้เกินกว่า 6 เมกะบิตต่อวินาที ซึ่งมากกว่ายานโคจรรุ่นก่อนหลายเท่า
ตลอดเวลาที่ผ่านมา MRO แบกรับข้อมูลกลับโลกมากกว่าครึ่งหนึ่งของข้อมูลดาวอังคารทั้งหมดเราอาจไม่ค่อยเห็นชื่อ MRO ในพาดหัวข่าว ทุกครั้งที่โรเวอร์ส่งภาพสวย ๆ หรือคลิปใหม่ ๆ มา ผู้คนมักจะพูดถึงยานที่อยู่บนพื้นดิน ไม่ใช่ยานโคจร แต่ในความจริงแล้ว ทุกไฟล์ ทุกบิตของข้อมูลแทบทั้งหมดผ่าน MRO ก่อนจะถึงมือเรา เราอาจมองว่า MRO คือ “โครงสร้างพื้นฐาน” มากกว่ายานสำรวจ มันไม่ได้ถูกออกแบบมาเพื่อแย่งซีน แต่มันถูกสร้างมาเพื่อทำให้ผลงานของยานอื่น ๆ เกิดขึ้นได้ และนี่คือเหตุผลที่มันคู่ควรกับคำว่า “ยานรับจบ”

เมื่อ NASA สร้าง Mars Reconnaissance Orbiter ขึ้นมา ทีมงานตั้งใจให้มันทำงานเพียง 2 ปีครึ่งในภารกิจหลักและถ้าโชคดีอาจขยายต่อได้บ้าง แต่ความจริงกลับกลายเป็นว่า ยานลำนี้อยู่มาเกือบ 20 ปี และยังคงเป็นหัวใจของเครือข่ายดาวอังคารในปัจจุบัน เรามองว่านี่คือ “ปาฏิหาริย์เชิงวิศวกรรม” ที่ไม่ได้เกิดขึ้นเพราะดวง แต่เกิดขึ้นจากการออกแบบให้ ยืดหยุ่นและปรับตัวได้
ในเชิงวิศวกรรม ยานอวกาศทุกลำจะถูกออกแบบโดยใช้หลักการ Design Life สมมติว่าเครื่องจักรจะทำงานได้อย่างน้อยกี่ปี หากมากกว่านั้นคือโบนัส MRO เองก็ถูกออกแบบให้อยู่ได้ราว 5 ปี แต่จนถึงวันนี้มันยังทำงานได้เป็น 3–4 เท่าของเวลาที่คาดไว้ เคล็ดลับสำคัญคือการ จัดการพลังงานและความร้อน อย่างมีประสิทธิภาพ บวกกับการมีเชื้อเพลิงเหลือจากการใช้ Aerobraking แทนการเบิร์นเครื่องยนต์ช่วงเข้าโคจร
แม้ MRO จะยังทำงานได้ แต่ก็ไม่ใช่ว่าไม่มีร่องรอยของกาลเวลา สัญญาณจาก Electra Relay เริ่มแสดงการเสื่อมสภาพ บางส่วนของระบบสื่อสารต้องทำงานสำรอง เครื่องมืออย่าง CRISM ก็ต้องปิดการใช้งานไปเพราะเครื่องทำความเย็นหมดอายุ ทีมงาน NASA ถึงกับเรียกมันว่า “ยานสูงวัย” ที่ต้องคอยปรับตัวและระมัดระวังมากขึ้น
ตอนในปี 2009 ที่คอมพิวเตอร์ Onboard เกิด Memory Error จนยานเข้าสู่ Safe Mode อยู่หลายครั้งติดต่อกัน ช่วงนั้นหลายคนกลัวว่าจะซ้ำรอย Mars Global Surveyor ที่เสียหายจากปัญหาซอฟต์แวร์มาก่อน แต่ทีม JPL ก็เลือกทางแก้ที่ไม่ใช่การปิดยานหรือสั่ง Reboot แบบง่าย ๆ พวกเขากลับไปนั่งวิเคราะห์บิตต่อบิต แล้ว “Patch” ซอฟต์แวร์การจัดการพลังงานใหม่ ทำให้ยานกลับมาปกติได้โดยไม่ต้องเสี่ยงกับการสั่งงานใหญ่ ๆ ที่อาจทำให้พังถาวร
ต่อมาในปี 2017 ปัญหาของ Inertial Measurement Unit หรือ IMU ที่เริ่มเสื่อมก็กลายเป็นเรื่องใหญ่อีก เพราะถ้า IMU ใช้ไม่ได้ ยานก็จะควบคุมทิศทางไม่ได้เลย ปกติแล้ววิธีแก้อาจต้องหันไปใช้ Hardware สำรอง แต่ JPL กลับเลือกวิธีที่ “นอกตำรา” กว่า พวกเขาสลับมาใช้โหมดที่เรียกว่า All-stellar mode คือให้ยานใช้กล้องส่องดาวจับ Pattern ของดวงดาวรอบตัวแทนการใช้ IMU เพื่อบอกทิศทาง วิธีนี้ฟังดูบ้า แต่มันได้ผล และทำให้ MRO อยู่ต่อได้อีกหลายปี แถมได้ความรู้มาเขียนไว้ใน Star Tracker Performance Estimate with IMU และ Star tracker accuracy improvement and optimization for attitude measurement in three-axis
การวางมรดกที่สำคัญให้กับการสำรวจดาวอังคารยุคถัดไป
ภาพจาก HiRISE และ CTX ไม่ได้จบแค่ในฐานะงานวิจัยทางธรณีวิทยา แต่ถูกนำมาใช้จริงในการเลือกพื้นที่ลงจอดของ Phoenix, Curiosity, Perseverance, InSight และแม้กระทั่งภารกิจที่กำลังจะตามมา เช่น Mars Sample Return หรือโครงการของ ESA อย่าง ExoMars Rosalind Franklin Rover การที่เรามี “Google Earth ของดาวอังคาร” อยู่ในมือ ทำให้การเลือก Landing Site ไม่ใช่การคาดเดาเหมือนในอดีต แต่เป็นการคำนวณเชิงข้อมูลละเอียดถึงระดับความชันของเนินเขาและความเสี่ยงของก้อนหินที่อยู่ตรงนั้นจริง ๆ เรามองว่ามรดกชิ้นนี้ทำให้ความเสี่ยงของการลงจอดลดลงอย่างมหาศาล และเปลี่ยนมาตรฐานการออกแบบภารกิจทั้งวงการ
ข้อมูลจาก CRISM และ SHARAD ยังคงถูกใช้อ้างอิงจนถึงปัจจุบัน แม้ตัวเครื่องมือจะเลิกใช้งานไปแล้วก็ตาม แผนที่แร่ธาตุและชั้นน้ำแข็งที่มันสร้างไว้ถูกเก็บไว้ใน Planetary Data System หรือ PDS และถูกใช้ต่อโดยนักวิทยาศาสตร์รุ่นใหม่ ๆ ที่อาจยังเรียนไม่จบตอน MRO ปล่อยขึ้นฟ้าเสียด้วยซ้ำ ในเชิงมรดก MRO เป็นเหมือน “ห้องสมุด” ที่คนรุ่นถัดมาสามารถเข้ามาค้นข้อมูลได้เรื่อย ๆ และเป็นตัวอย่างชัดเจนว่าการลงทุนในยานหนึ่งลำสามารถสร้างคุณค่าได้ยาวนานกว่าทศวรรษ
เมื่อเรามองย้อนกลับไปตั้งแต่วันที่ Mars Reconnaissance Orbiter ถูกปล่อยขึ้นจากฟลอริดาในปี 2005 จนถึงวันนี้ที่มันยังคงโคจรอยู่รอบดาวอังคาร เราจะเห็นเส้นทางของยานที่ไม่เคยหยุดนิ่ง MRO ผ่านการเสี่ยงตายกับ Aerobraking หลายเดือน มันกลายเป็นสายตาที่คมชัดที่สุดของมนุษย์บนดาวอังคาร มันเป็นนักธรณีวิทยาที่มองทะลุลงไปใต้พื้นผิว มันเป็นนักอุตุนิยมวิทยาที่เฝ้าดูพายุฝุ่นทั้งดวง และมันยังเป็นเครือข่ายสื่อสารที่คอยส่งเสียงของเพื่อน ๆ ที่อยู่บนพื้นกลับมายังโลก ถ้าไม่มีมัน ภารกิจที่เรายกขึ้นหิ้งอย่าง Curiosity, Perseverance หรือแม้แต่เสียงลมที่เราฟังจากดาวอังคารครั้งแรก อาจไม่มีวันเดินทางมาถึงเราเลยด้วยซ้ำ

เราอาจพูดได้ว่า MRO ไม่เคยถูกออกแบบมาเพื่อ “แย่งซีน” มันไม่ได้เป็นยานที่จุดไฟให้โลกตื่นเต้นด้วยการลงจอดหรือการเจาะหินก้อนแรก แต่มันคือยานที่คอยอยู่เบื้องหลังทุกความสำเร็จ และสร้างระบบที่ทำให้เพื่อนร่วมทีมทุกลำเดินหน้าต่อไปได้ เรามองว่า MRO คือตัวอย่างที่ชัดเจนที่สุดว่า การสำรวจอวกาศไม่ใช่เรื่องของฮีโร่เดี่ยว ๆ แต่มันคือการสร้าง โครงสร้างพื้นฐาน ที่คนอื่นต้องพึ่งพา และในเกือบ 20 ปีที่ผ่านมา MRO ก็ได้ทำหน้าที่นั้นอย่างสมบูรณ์แบบจนไม่มีใครแทนที่ได้
และถ้าวันหนึ่งสัญญาณของมันดับลงจริง ๆ มันจะไม่ใช่เพียงการสิ้นสุดของยานโคจรลำหนึ่ง แต่มันจะเป็นการปิดฉากของ “เพื่อนร่วมทีม” ที่อยู่กับเรามาตลอดสองทศวรรษ เราจะจดจำเสมอว่า เบื้องหลังทุกความสำเร็จบนดาวอังคาร มีเงาของ MRO อยู่ตรงนั้น เงาที่ไม่เคยต้องการแสงไฟ แต่ทำให้แสงไฟส่องสว่างบนเวทีแห่งการสำรวจดาวเคราะห์สีแดงได้ตลอดมา
เรียบเรียงโดย ทีมงาน Spaceth.co