นับตั้งแต่มีการส่งมนุษย์ขึ้นสู่อวกาศสำเร็จครั้งแรกเมื่อวันที่ 12 เมษายน 1961 ก็เป็นเวลาเกือบ 60 ปีด้วยกันแล้วที่มนษย์ได้สัมผัสกับสภาวะไร้น้ำหนัก ซึ่งเป็นประสบการณ์ที่คนทั่วไปไม่เคยได้พบเจอในช่วงเวลานั้น มันเป็นสิ่งหนึ่งที่ดูแปลกใหม่และค่อนข้างเป็นอะไรที่วิเศษสำหรับกลุ่มคนที่ได้พบเจอกับอะไรเช่นนั้นในระยะต้นของการส่งมนุษย์ขึ้นสู่อวกาศ เพราะเนื่องด้วยเหตุผลทางการเมืองระหว่างสองชาติมหาอำนาจอย่างสหรัฐอเมริกาและสหภาพโซเวียตจึงได้มีการผลักดันโครงการอวกาศซึ่งนำไปสู่เหตุการณ์ Space Race จนได้มีการส่งมนุษย์ขึ้นไปเยือนอวกาศและดวงจันทร์
เหตุการณ์ในตอนนั้นส่งผลต่อโครงการอวกาศของหลาย ๆ ชาติทั่วโลกมาจนถึงทุกวันนี้ ทุกอย่างมันดูง่าย ไม่ต้องออกแรงสู้กับแรงโน้มถ่วง ดูมีความอิสระจะทำอะไรตรงไหนก็ได้ สิ่งพวกนี้คือภาพที่หลาย ๆ คนนึกถึงเมื่อพูดถึงสภาวะไร้น้ำหนัก มันอิสระต่อการเคลื่อนไหวซึ่งอาจเป็นสิ่งที่หลาย ๆ คนใฝ่หา แต่จริง ๆ แล้วมันไม่ได้อิสระมากขนาดนั้น มันมีข้อจำกัดอีกหลายอย่างที่ไม่สามารถทำแบบเดียวกันกับการอยู่ในสถานที่ที่มีแรงโน้มถ่วง ประกอบกับมนุษย์เราไม่ได้อยู่ในช่วงที่วิวัฒนาการมาเพื่อใช้ชีวิตและอยู่อาศัยในสภาวะไร้น้ำหนัก ดังนั้นมันอาจมีแค่ประโยชน์ต่อเรื่องบางเรื่องเท่านั้นเช่นงานวิจัยหรืองานทดลองต่าง ๆ ที่ต้องใช้สภาวะไร้น้ำหนักเป็นตัวช่วยหรือแม้กระทั่งการเคลื่อนย้ายวัตถุที่มีมวลมาก ๆ แต่อย่างไรก็ตาม มนุษย์เราก็อยู่ไม่ได้เมื่อไม่มีแรงโน้มถ่วงเช่นกัน ในบทความนี้จะพาทุกคนไปหาวิธีการแก้ไขปัญหาสภาวะไร้น้ำหนักที่ไม่ได้ง่ายและไม่ได้ยากอย่างที่คิด
จาก Paper ที่มีชื่อว่า Artificial Gravity in Theory and Practice เราได้ลองนำเอาสรุปสาระสำคัญเกี่ยวกับแรงโน้มถ่วงเทียมมาเล่าให้ฟังกัน
แนวคิดเกี่ยวกับแรงโน้มถ่วงเทียมของซีออลคอฟสกี
ย้อนกลับไปในสมัยที่ยังไม่เคยมีใครได้ขึ้นไปเยือนอวกาศ มีชายคนหนึ่งได้คิดและได้เสนอแนวคิดเกี่ยวกับการเดินทางในอวกาศ และเขาก็โด่งดังจากการคิดค้นสมการการเคลื่อนที่ของจรวดหรือ Rocket equation (ΔV) เขาคนนี้คือผู้ที่เหล่าวิศวกรที่ทำงานที่เกี่ยวข้องกับการทำงานของจรวดรู้จักกันดีในชื่อ คอนแสตนติน เอดูอาร์โดวิช ซีออลคอฟสกี (Konstantin Eduardovich Tsiolkovsky) นักวิทยาศาสตร์ชาวรัสเซีย
เนื่องด้วยว่าซีออลคอฟสกีเป็นคนที่มองกาลไกลถึงขนาดคำนึงถึงสิ่งที่จะเกิดขึ้นในอวกาศ (ทั้งที่ตอนนั้นยังไม่เคยมีใครได้ขึ้นไปเยือนอวกาศเลย) เขาได้ตีพิมพ์งานเขียนผ่านหนังสือหลายเล่มที่ส่วนใหญ่มีเนื้อหาที่เกี่ยวข้องกับจรวดและการเดินทางในอวกาศของมนุษย์ เขาได้เห็นและคำนึงถึงปัญหาที่จะเกิดขึ้นกับการใช้ชีวิตของมนุษย์บนอวกาศ นั่นคือการต้องใช้ชีวิตที่อยู่ในสภาวะไร้น้ำหนักซึ่งไม่ใช่ธรรมชาติปกติที่มนุษย์เคยอยู่ แน่นอนว่ามันย่อมมีผลกระทบต่อสิ่งมีชีวิตที่อาศัยอยู่ในสภาวะไร้น้ำหนักแน่ ๆ ซีออลคอฟสกีเลยคิดหาวิธีการที่จะทำอย่างไรให้มนุษย์หรือสิ่งมีชีวิตอาศัยอยู่ในสภาวะไร้น้ำหนักได้ ซึ่งมันเป็นแนวคิดที่ง่ายมาก ๆ นั่นคือเราก็สร้างแรงโน้มถ่วงเลียนแบบขึ้นมาเสียเลยสิ วิศวกรรมซะอย่าง (ฮา)
หลาย ๆ คนอาจถามว่า “แล้วเราจะสร้างแรงโน้มถ่วงขึ้นมาได้อย่างไร ?” ในส่วนของตรงนี้ทางผู้เขียนและทีมงานอยากให้ทุกท่านลบภาพจำที่เกี่ยวข้องกับภาพยนตร์ไซไฟล้ำยุคไปก่อน ไม่ว่าจะเป็น Star Wars, Star Trek, Event Horizon หรือภาพยนตร์เรื่องใด ๆ ก็ตามที่เกิดจากการนำวิทยาศาสตร์มาปรุงแต่งเข้ากับจินตนาการของผู้สร้างผลงาน (แต่ที่จริงก็มีภาพยนตร์หรือบทประพันธ์อีกมากเรื่องที่นิยมอิงหลักการและทฤษฎีที่ได้รับการยอมรับมาใช้เป็นส่วนมากของเนื้อหาเช่นกัน) โดยกลุ่มตัวอย่างภาพยนตร์ที่ยกมาก่อนหน้านี้ล้วนมีเนื้อหาที่เกี่ยวข้อกับยานอวกาศล้ำยุคที่มี option แรงโน้มถ่วงเทียมรูปแบบสนามพลังในการทำให้สิ่งมีชีวิตต่าง ๆ บนยานสามารถทำกิจกรรมต่าง ๆ ภายใต้แรงโน้มถ่วงเทียมได้ แต่ในโลกแห่งความเป็นจริงนั้น เทคโนโลยีของมนุษย์ในปัจจุบันยังไม่สามารถสร้างอะไรแบบภาพยนตร์พวกนั้นได้ (ว่าง่าย ๆ คือวิทยาการในตอนนี้ของเรายังไปไม่ถึงขั้นนั้น)
แต่มันก็ไม่ได้แปลว่าเราจะทำไม่ได้เสียทีเดียว มันมีอีกทางหนึ่งที่เป็นที่รู้จักในหมู่นักออกแบบและผู้ที่สนใจในเทคโนโลยีอวกาศในต่างประเทศ ซึ่งมันมีจุดเริ่มต้นมาจากหลักฟิสิกส์ง่าย ๆ นั่นคือแรงโน่มถ่วงเทียมแบบการหมุนเหวี่ยงหรือ Artificial gravity centrifuge
ต้องบอกก่อนว่าแรงโน้มถ่วงที่มนุษย์สร้างได้ตอนนี้นั้นไม่ใช่การสร้างแรงดึงดูดแบบดึงดูดระหว่างมวล แต่เรากำลังจำลองแรงที่ทำให้เกิดน้ำหนัก และเปลี่ยนจากแรงโน้มถ่วง อันเป็นแรงในธรรมชาติมาเป็นแรงเหวี่ยงที่เราสามารถสร้างขึ้นมาได้นั่นเอง
ไม่ได้สร้างแรงโน้มถ่วง แต่สร้างแรงเหวี่ยง ที่นำมาสู่น้ำหนัก
เดี๋ยวก่อนนะ ? หมุนเหวี่ยง ? จริง ๆ แล้วในส่วนตรงนี้มันสร้างแรงได้และมันไม่แปลกใหม่เลยและที่สำคัญคือเราเจอมันได้ในชีวิตประจำวันทั่วไป โดยจะขออิงตัวอย่างง่าย ๆ ที่ทุกคนต้องพบเจอในชีวิตประจำวันนั่นคือรถยนต์ อยากให้ทุกคนนึกภาพตามเวลานั่งรถขณะเข้าโค้ง เมื่อตัวรถเลี้ยวไปทางใดทางหนึ่งคุณก็จะรู้สึกว่าตัวเองถูกเหวี่ยวไปในฝั่งตรงข้ามกับทิศการเลี้ยว ถ้าให้อธิบายอีกก็คือเมื่อรถเลี้ยวซ้ายคุณจะถูกเหวี่ยงไปด้านขวา และเมื่อรถเลี้ยวขวาคุณก็จะถูกเหวี่ยงไปทางซ้าย

จริง ๆ แล้วมันอธิบายได้ด้วยฟิสิกส์นิวตันง่าย ๆโดยกฎการเคลื่อนที่ข้อที่หนึ่งของนิวตัน หรือกฎของความเฉื่อยที่กล่าวไว้ว่า “วัตถุทุก ๆ ชิ้นจะมีรูปแบบการเคลื่อนที่เดิมเป็นเส้นตรง เว้นแต่ว่าวัตถุนั้นจะถูกกระทำให้เปลี่ยนแปลงลักษณะการเคลื่อนที่เดิมโดยแรงจากภายนอก” ถ้าพูดเพื่อให้เข้าใจได้ง่ายขึ้นก็คือ วัตถุใด ๆ ที่กำลังเคลื่อนที่อยู่ ถ้าไม่ถูกแรงภายนอกมากระทำไม่ว่าจะเป็นแรงทางทิศทางไหน วัตถุนั้นก็จะเคลื่อนที่เป็นเส้นตรงต่อไปไม่เปลี่ยนเส้นทาง ทีนี้อยากให้ลองให้ลองเปลี่ยนวัตถุนั้นเป็นคุณที่กำลังนั่งรถที่กำลังเข้าโค้งอยู่
อย่างที่บอกไปว่าวัตถุจะรักษาสภาพการเคลื่อนที่เดิมไว้ในแนวเส้นตรงจากกฎของความเฉื่อย ดังนั้นคุณไม่ได้ถูกเหวี่ยงไปในทิศตรงข้ามของการเลี้ยว แต่แค่คุณรักษาสภาพการเคลื่อนที่เดิมไว้นั่นเอง โดยคุณแค่ยังอยู่ในสภาพการเคลื่อนที่เดียวกันกับรถก่อนเลี้ยวและคุณก็ยังอยู่ในการเคลื่อนที่แบบนั้นด้วยในขณะที่รถเริ่มเลี้ยวในช่วงเวลาสั้น ๆ นั่นคือคุณเคลื่อนที่ไปคนละทิศทางกับแนวการเคลื่อนที่ของรถในช่วงเวลาสั้น ๆ ตรงนั้น (ถ้าให้มองจากภายนอกตัวรถ)
ดังนั้นคุณแค่รู้สึกว่าตัวเองกำลังถูกเหวี่ยงไปคนละทางการการเลี้ยวของรถเท่านั้นเอง ประกอบกับหลักการเคลื่อนที่อีกรูปแบบหนึ่งที่เชื่อว่าใครหลาย ๆ คนก็ต้องเคยเจอในวิชาฟิสิกส์ตอน ม.ปลายแน่นอน นั่นคือการเคลื่อนที่แบบวงกลม โดยตรงนี้ก็จะขอยกตัวอย่างที่หลาย ๆ คนอาจเจอในชีวิตมาแล้วเช่นกัน มันคือรถ (หรือยานยนต์ใด ๆ ก็ได้) ไต่ถัง ตรงนี้มันคล้ายกับการเข้าโค้งของรถยนต์มาก ๆ แต่แค่เป็นการเคลื่อนที่แบบครบวง โดยที่ยานยนต์เหล่านั้นสามารถวิ่งขึ้นไปเกาะบนขอบถังขนาดใหญ่นั้น สามารถอธิบายได้ด้วยสูตรฟิสิกส์ที่กล่าวว่า แรงเข้าสู่ศูนย์กลางจะมีค่าเท่ากับมวลคูณความเร็วยกกำลังสองหารด้วยรัศมีหรือ Fc = mv^2 / r แต่มีเงื่อนไขว่าถ้าอยากได้แรงเข้าสู่ศูนย์กลางที่คงที่ต้องทำความเร็วที่คงที่เช่นกัน โดยถ้าเราอยากได้แรงเท่าไหร่ก็แค่กำหนดความเร็วในการหมุนและความยาวรัศมีเท่านั้นเอง แต่ก็ต้องอธิบายอีกว่าในเมื่อมีแรงเข้าสู่ศูนย์กลางก็ต้องมีแรงหนีศูนย์กลางอีก สำหรับกรณีนี้เป็นการที่วัตถุวิ่งไปบนขอบถังหรือขอบของส่วนโค้ง (จริง ๆ มันคล้ายกับการผูกเชือกติดกับวัตถุแล้วเหวี่ยงเชื่องเป็นวงกลม) โดยวัตถุจะแสดงสถานะที่ “หนีจากศูนย์กลาง” แต่เนื่องด้วยว่าวัตถุนั้นหนีออกไปไม่ได้อีกเพราะขอบของส่วนโค้งนั้นที่กั้นไว้ทำเกิดแรงคู่กิริยากระทำกลับมานั่นคือแรงเข้าสู่ศูนย์กลางนั่นเอง

ตามที่ได้กล่าวตามข้างต้นมานั้นเป็นหลักการที่นำมาใช้ร่วมกับแรงโน้มถ่วงเทียมแบบหมุนเหวี่ยงตามแนวคิดของคุณซีออลคอฟสกี ตามที่บอกว่าเราอยากได้แรงมากน้อยแค่ไหนเราก็แค่กำหนดความเร็วในการหมุนและความยาวรัศมี แต่นี่เป็นความเชื่อและแนวคิดของคุณซีออลคอฟสกีที่ได้เสนอแนวคิดนี้ในเวลานั้น แต่ในเวลาต่อมา นักวิทยาศาสตร์รุ่นหลังจากคุณซีออลคอฟสกีก็ได้พบว่ามันมีอะไรมากกว่าการที่กำหนดค่าแค่สองตัวแปรตามที่กล่าวไป ก่อนอื่นเลย ถึงแม้เราจะสร้างแรงโน้มถ่วงเทียมได้แล้ว แต่นั่นไม่ได้แปลว่ามันจะเหมือนแรงโน้มถ่วงของจริงทุกประการ แรงโน้มถ่วงของจริงก็คือแรงที่เรากำลังเจออยู่ในทุกวันนี้ ตั้งแต่ตื่นเช้าจนกระทั่งเข้านอน คุณก็จะเจอแรงโน้มถ่วงได้ตลอดเวลาซึ่งเกิดจากแรงดึงดูดระหว่างมวลที่โลกกระทำกับเราและเรากำลังระทำกับโลก และสามารถพบเจอได้บนวัตถุที่มีมวลแทบจะทุกที่ในจักรวาล แต่แรงโน้มถ่วงเทียมแบบหมุนเหวี่ยงนี้ไม่ใช่แบบนั้น ถึงแม้เราจะยืนอยู่บนโครงสร้างที่หมุนได้และมีมวล แต่มวลที่ว่ามันก็ไม่ได้มากพออยู่ดีที่จะดึงดูดเราจนเราสามารถสัมผัสแรงนั้นได้ ดังนั้นตัวโครงสร้างนี้จึงอาศัยการหมุนเหวี่ยงเข้าช่วยเพื่อทำให้เท้าของเราเกาะติดหรือยืนอยู่บนพื้นของโครงสร้างที่หมุนได้
การหมุนเหวี่ยงและสรีรวิทยา
ตามที่ได้กล่าวไปก่อนหน้าว่ากลุ่มนักวิยาศาสตร์รุ่นหลังได้พบว่ามันมีอะไรที่มากกว่าการกำหนดค่าตัวแปรแค่ความยาวรัศมีและความเร็วในการหมุน เพราะเนื่องจากว่ามันมีผลกาะทบต่อเรื่องสรีรวิทยาของสิ่งมีชีวิตโดยเฉพาะสัตว์เลี้ยลูกด้วยน้ำนม
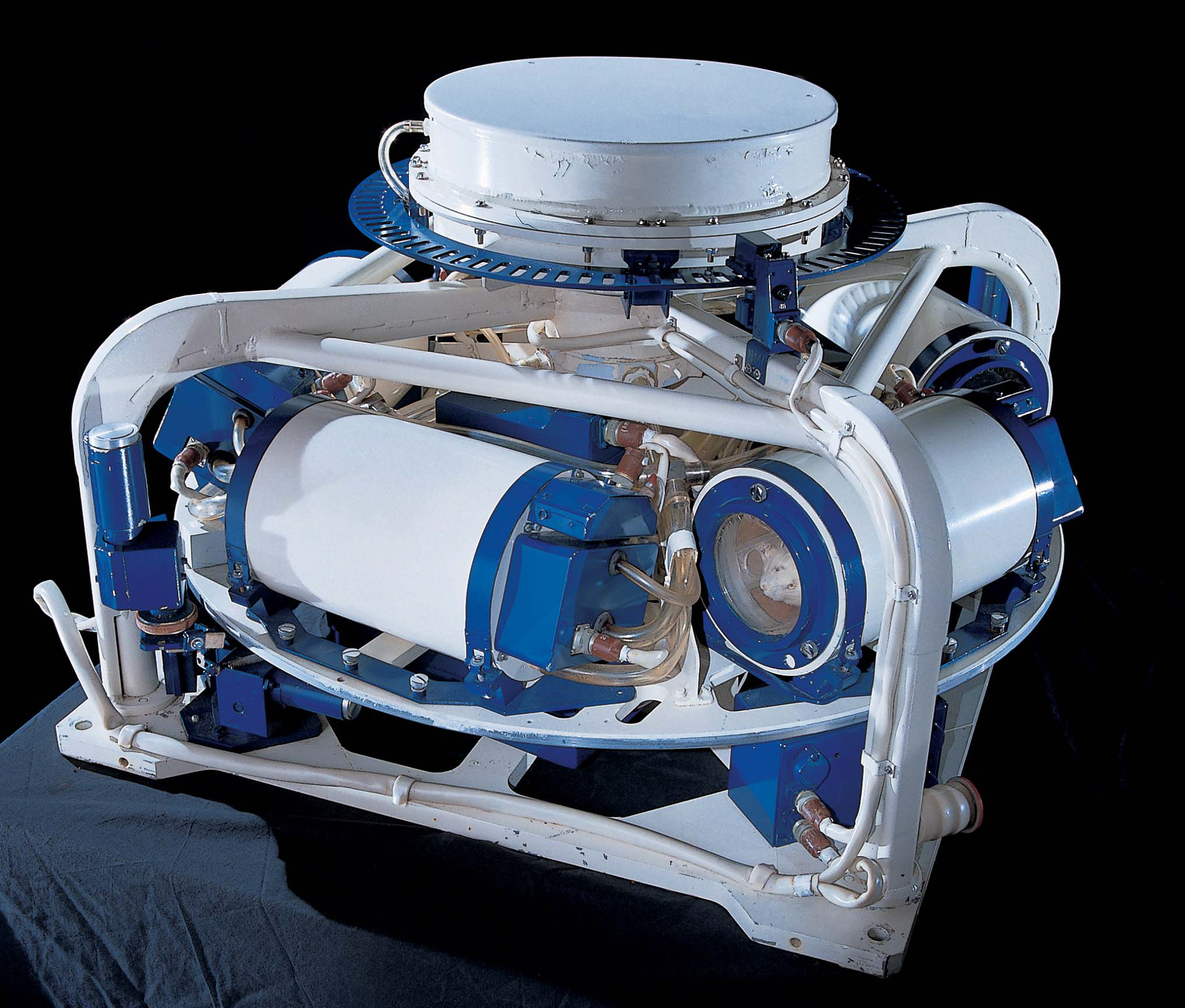
ขอยกตัวอย่าง study case หนึ่งที่ทางสหภาพโซเวียตได้เคยส่งยานอวกาศขี้นไปลำหนึ่งหนึ่ง โดยยานลำนั้นมีชื่อว่า Bion 4 หรือ Kosmos-936 โดยภาพที่เห็นอยู่นี้เป็นภาพของอุปกรณ์ส่วนหนึ่งของยาน Kosmos-936 เท่านั้น โดยรูปนี้จะเห็นอุปกรณ์ลักษณ์คล้ายท่อเล็ก ๆ ซึ่งในตอนนั้นภายในท่อพวกนี้มีหนูร่วมเดินทางไปกลุ่มหนึ่ง โดยเป็นงานทางวิทยาศาสตร์ที่ไว้ใช้ศึกษา Experiment แรงโน้มถ่วงเทียมแบบหมุนเหวี่ยง เพราะอย่างที่หลาย ๆ คนรู้กันดีว่าการอยู่ในอวกาศที่อยู่ในสภาวะไร้น้ำหนักนั้นมันส่งผลกระทบต่อร่างการมนุษย์ไม่ว่าจะเป็นการสูญเสียมวลกล้ามเนื้อ การสูญเสียมวลกระดูก รวมไปจนถึงปัญหาด้านสายตาที่ในยุคนั้นนักบินอวกาศในภารกิจ Skylab ต้องพบเจอ (เพราะเนื่องจากว่าเป็นครั้งแรกที่มีการส่งมนุษย์ขึ้นไปอยู่ในอวกาศในช่วงเวลาที่นานขนาดนั้น จึงยังไม่มีใครคาดการณ์ถึงปัญหานี้) และปัญหาย่อยอื่น ๆ อีกมาก จึงทำให้มีแนวคิดที่จะทดลองแรงโน้มถ่วงจำลองแบบหมุนเหวี่ยงกับหนูซึ่งอยู่กลุ่มสัตว์ที่เลี้ยงลูกด้วยน้ำนมที่มีความคลายกับมนุษย์แต่มีขนาดเล็กขึ้นไปทดลองบนอวกาศ โดยอุปกรณ์หมุนเหวี่ยงในภารกิจดังกล่าวทำงานนาน 18.5 วัน ผลก็คือมันช่วนลดอัตรการสูญเสียเซลล์เม็ดเลือดแดงได้รวมไปจนถึงรักษาแร่ธาติในกระดูก โครงสร้างและคุณสมบัตเชิงกลได้อีกด้วย แต่เนื่องจากว่าอุปกรณ์สร้างแรงเหวี่ยงที่ว่ามันหมุนด้วยจำนวน 57.5 รอบต่อนาทีซึ่งเป็นอะไรที่สูงมาก ๆ จึงยังคงมีผลกระทบในเรื่องของการทำงานของร่างกายต่อกลุ่มหนูที่ร่วมภารกิจนี้เช่นกัน
หลังจากนั้นก็ได้มีกลุ่มนักวิทยาศาสตร์อีกกลุ่มที่ได้ทดลองกับมนุษย์จริง ๆ แต่ทดลองกันบนพื้นโลก โดยให้กลุ่มคนที่ถูกคัดเลือกมาไปอยู่ในห้องหมุนเหวี่ยงขนาดใหญ่เป็นเวลาหลายวัน มีการปรับเปลี่ยนความเร็วเชิงมุมเพื่อทำการทดลองหลาย ๆ ค่า ซึ่งแต่ละค่าของความเร็วเชิงมุมก็ส่งผลกระทบกับคนที่ได้เข้าไปทดลองโดยมีความรุนแรงของอาการต่างกันออกไป จนในที่สุดกลุ่มนักวิทยาศาสตร์ก็ได้กราฟที่เป็นการเทียบค่าระหว่างความยาวรัศมีและจำนวนรอบการหมุนต่อนาที (RPM) โดยตามภาพ จากกราฟจะเห็นได้ว่าในรูปมี Comfort zone ที่สิ่งมีชีวิตอยู่ได้ (โดยมีผลกระทบน้อยที่สุดซึ่งอยู่ในช่วงของสีเขียวสด) อยู่ในช่วงไม่เกิน 2 RPM เทียบกับ รัศมีประมาณ 75 เมตรขึ้นไป (จริง ๆ แล้วกราฟนี้มีอีกกราฟหนึ่งที่ Comfort zone มีค่าไม่เกิน 4 RPM และมาจาก paper ของคนเดียวกัน แต่ด้วยความเป็นกราฟที่ไม่ค่อยชัดเจนถึงพื้นที่ของ Comfort zone จึงเลือกกราฟที่มีค่า RPM ไม่เกิน 2 RPM มาแทน)

จากกราฟเราจะเห็นได้ว่าช่วง Comfort zone ของแรงโน้มถ่วงเทียมนี้จะอยู่ระหว่า 0.3 g และ 1.0 g หรือมีค่าใกล้เคียงแรงโน้มถ่วงของดาวอังคารและโลก และจากกราฟจะเห็นได้ว่าเมื่อรัศมีมีค่าความยาวที่มากขึ้น ความเร็วในหน่วย RPM ก็จะลดลงไป หรือถ้าพูดง่าย ๆ ก็คือความยาวรัศมีแปรผกผันกับความเร็วของการหมุนนั่นเอง ถามว่าทำไมเป็นเช่นนั้น ในตรงนี้จะขอพิสูจน์ด้วยวิธีการคำนวณแบบง่าย ๆ ด้วยสูตร Fc = mv^2 / r โดยกำหนดให้มีความเร็วรอบต่อนาทีเท่ากันที่ 1 RPM และกำหนดรัศมีที่ไม่เท่ากันคือ 50 และ 100 เมตรซึ่งมีความยาวรอบที่ไม่เท่ากันนั่นคือประมาณ 314 และ 628 เมตรตามลำดับ แต่เนื่องด้วยว่ามันเป็นความเร็วเชิงมุมในการหมุนที่เท่ากันจึงทำให้ความเร็วเชิงเส้นของการไม่เท่ากัน ตามที่กำหนดไปว่าให้มีความเร็วเชิงมุมที่ 1 RPM ดังนั้นจึงนำตัวเลข 60 วินาทีที่ทำให้วัตถุเคลื่อนที่ครบหนึ่งรอบไปหารความยาวรอบวงของรัศมีที่กำหนดไว้สองวง จะได้ความเร็วเชิงเส้นที่ 5.23 และ 10.47 เมตรตามลำดับ พอได้ค่าความเร็วเชิงเส้นมาแล้วก็นำเข้าไปแทนค่าในสูตรต่อโดยกำหนดให้มวลทีค่าเท่ากันนั่นคือ m โดยจะได้คำตอบของแรงที่ได้ของความยาวรัศมี 50 และ 100 เมตรมีค่าประมาณ 0.56m และ 1.10m นิวตันตามลำดับ จะเห็นได้ว่าที่ความเร็วเชิงมุมเท่ากันแต่มีความยาวรัศมีที่ไม่เท่ากัน แรงที่ได้ออกมาก็จะไม่เท่ากัน ดังนั้นการที่อยากจะได้แรงเท่ากันจึงต้องลดความเร็วเชิงมุมของวงที่ใหญ่กว่าหรือไม่ก็เพิ่มความเร็วเชิงมุมให้วงที่เล็กกว่า (ในส่วนของตรงนี้ก็ต้องไปคำนวณกันอีกที)
แรงโน้มถ่วงเทียมและการออกแบบเพื่อใช้งานจริง
มาถึงตรงนี้คงจะปฏิเสธไม่ได้แล้วว่าเราสามารถสร้างแรงโน้มถ่วงเทียมได้จริง แต่นั่นก็แค่เกิดจากการคำนวณและการทดลองจากงานทางวิทยาศาสตร์หลาย ๆ งานมาช่วย support และเพิ่มความเป็นไปได้ในการสร้างแรงโน้มถ่วงเทียม โดยที่ในปัจจุบันยังไม่มีใครหรือหน่วยงานไหนสร้างมันขึ้นมาเพื่อใช้งานจริง ๆ ในหัวข้อส่วนนี้ทางผู้เขียนจะมาวิเคราะห์วิธีการสร้างสถานที่ที่มีแรงโน้มถ่วงเทียมแบบหมุนเหวี่ยงเป็นหลัก (ขอเตือนล่วงหน้าไว้ก่อนว่า เนื้อหาหลังจากนี้เกิดจากความคิดเห็นของทางผู้เขียน โดยจะพยายามอิงความเป็นไปได้ให้มากที่สุด) การสร้างโครงสร้างที่มีแรงโน้มถ่วงเทียมแบบหมุนเหวี่ยงนั้น แน่นอนว่าหนีไม่พ้นโครงสร้างวงแหวนแบบท่อคล้ายล้อรถแบบเติมลม เพราะมันต้องมีพื้นไปรองรับเท้าของผู้ที่อยู่อาศัยในนั้น และเนื่องจากว่ามันอยู่ในอวกาศจึงจำเป็นต้องมีโครงสร้างแบบปิดเพื่อให้สิ่งมีชีวิตสามรถอยู่อาศัยในนั้นได้จึงต้องออกแบบให้มีรูปร่างคล้ายล้อรถหรือรูปทรงใด ๆ ก็ได้ที่มีลักษณะคล้ายวงแหวนและภายในนั้นต้องกลวงเพื่อให้มีพื้นที่สำหรับอยู่อาศัยได้ แต่ถ้ามันง่ายขนาดนี้ทำไมมันยังไม่มีใครสร้างมันขึ้นมาเพื่อใช้งานในอวกาศเลยกันนะ? คิดแบบง่าย ๆ เลย คำตอบก็คือการที่จะสร้างวงแหวงขนาดใหญ่ที่มีเส้นผ่าศูนย์กลางไม่ต่ำกว่า 150 เมตร (สองเท่าของค่ารัศมีขั้นต่ำสำหรับ Comfort zone) แบบนี้ในปัจจุบันมันเป็นไปได้ยากมาก ๆ ที่จะส่งมันขึ้นไปในครั้งเดียว
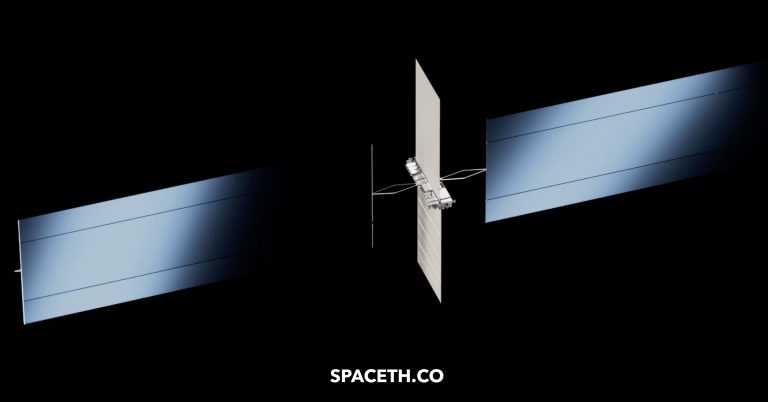
ดังนั้นวิธีที่จะแก้ปัญหานี้ได้นั่นคือการแบ่งเป็นชิ้นเล็ก ๆ แล้วค่อยนำขึ้นไปประกอบกันในอวกาศ ซึ่งวิธีนี้มีความเป็นไปได้มากกว่าในปัจจุบัน สำหรับการนำขึ้นไปประกอบกันบนอวกาศมันก็จะมีวิธีหนึ่งที่มีความเป็นไปได้มากที่สุดและไม่ใช่การนำ Material ชิ้นเล็ก ๆ ไปประกอบรวมกันบนอวกาศ ซึ่งวิธีนั้นคือการแบ่งเป็น Module ย่อย ๆ คล้าย Module บนสถานีอวกาศนานาชาติ มนุษย์เราเคยเรียนรู้และได้ประสบการณ์จากการสร้างสถานีอวกาศมาแล้ว ดังนั้นการใช้วิธีนี้อาจเป็นวิธีที่ง่ายที่สุดในตอนนี้และมันก็สามารถทำได้ ถ้างบประมาณมีมากพอ ซึ่งในปัจจุบันก็เป็นอย่างที่รู้กันดี (ฮา) ตามที่กล่าวมานี้มันคือสถานีแรงโน้มถ่วงเทียมแบบหมุนทั้งแท่ง ซึ่งคล้ายกับ Space station V ภาพพยนตร์เรื่อง 2001: A Space Odyssey ซึ่งตรงนี้ใช้หลักการประกอบกันบนอวกาศแบบใช้ Material ขึ้นไปประกอบเลยโดยไม่ได้มีการสร้างเป็น Module ย่อย ๆ หรือไม่ก็ยาน Endurance จากภาพยนตร์เรื่อง Interstellar ที่ใช้หลักการประกอบแบบสร้างเป็น Module ย่อย ๆ บนพื้นโลกแล้วจึงนำไปประกอบกันบนวงโคจร
แต่ถ้าการทำแรงโน้มถ่วงเทียมทั้งสถานีหรือทั้งลำก็อาจะลำบากหน่อยเวลานำยานอวกาศเข้ามา Dock กับยานอวกาศหรือสถานีนั้น ๆ ดังนั้นมันจึงมีอีกอิธีหนึ่งที่จะลดปัญหานี้ไปได้นั้นคือทำให้ตัวสถานีมีสองส่วนนั่นคือส่วนที่ต้องอยู่นิ่ง ๆ ไม่หมุนไปไหน และส่วนที่สร้างแรงโน้มถ่วงเทียมที่จำเป็นต้องหมุน โดยวิธีนี้ก็ต้องติดตั้งชิ้นส่วนที่ไว้เชื่อมต่อระหว่างส่วนที่อยู่นิ่งละส่วนที่หมุน และปัญหาที่ตามมาอีกก็คือส่วนที่หมุนได้จะทำให้ส่วนที่ต้องอยู่นิ่งหมุนอีกอยู่ดี โดยจะหมุนในทิศตรงข้ามกัน ซึ่งก็จะมีวิธีแก้ปัญหาอีกสองวิธี โดยให้ติดตั้งอุปกรณ์ที่เรียนว่า Gyroscope ไว้บนส่วนที่ต้องอยู่นิ่ง หรือสร้างวงแหวนส่วนที่ต้องหมุนเพื่อสร้างแรงโน้มถ่วงจำลองไว้ถึงสองชุดโดยมีเงื่อนไขว่าต้องหมุนส่วนทางกันและวงแหวงทั้งสองวงต้องมีมวลเท่ากัน และต้องวาง Module สำหรับ Dock กับยานที่มาเชื่อมต่ออยู่ในส่วนที่ต้องอยู่นิ่ง โดยแนวคิดนี้จะคล้ายกับยาน Ares III จากภาพยนตร์เรื่อง The Martian และสามารถใช้วิธีนี้บน ISS ได้เช่นกันเพื่อลดงบประมาณและไม่ต้องไปสร้างสถานีอวกาศแยก (เอาเข้าจริง ๆ ยาน Ares III ก็แทบเหมือนการนำ ISS มาแยกแล้วประกอบใหม่และทำให้เคลื่อนที่ออกจากวงโคจรชัด ๆ)

สรุปโดยภาพรวมก็คือ ในปัจจุบันนี้สามารถสร้างแรงโน้มถ่วงเทียมได้ แต่ยังต้องอาศัยหลักการหมุนเหวี่ยงที่มีข้อจำกัดหลายอย่าง ทั้งในเรื่องของผลกระทบทางสรีรวิทยาที่มีผลต่อสิ่งมีชิวิตที่อยู่อาศัยในสภาพแวดล้อมแบบนั้นทำให้ต้องควบคุมค่าของความเร็วเชิงมุมและความยาวรัศมี และยังมีเรื่องข้อจำกัดทางวิศวกรรมและการออกแบบที่ทำให้จำเป็นต้องใช้แนวคิดนี้ไปก่อน แต่ปัญหาที่ใหญ่ไปกว่านั้นก็คือเรื่องของงบประมาณที่หลาย ๆ หน่วยงานมีให้และให้ความสำคัญกับแนวคิดนี้มากน้อยแค่ไหน ด้วยสาเหตุนี้เราจึงยังไม่เห็นสถานีแรงโน้มถ่วงเทียมที่ใช้งานจริงสำหรับตอนนี้ แต่มันก็อาจไม่แน่ในอนาคตอันใกล้ถ้ามีงานที่จำเป็นต้องให้นักบินอวกาศขึ้นไปทำงานบนอวกาศในช่วงเวลาที่นาน ประกอบกับการเดินทางไปดาวอังคารที่มีมนุษย์เดินทางไปด้วยนั้นก็ใกล้เข้ามาเรื่อย ๆ ซึ่งการเดินทางไปดาวอังคารนั้นต้องใช้เวลาเดินทางที่นานมาก ๆ แรงโน้มถ่วงเทียมคงเป็นหนึ่งในไม่กี่ทางเลือกที่จะลดปัญหาที่จะส่งผลกระทบต่อมนุษย์หรือสิ่งมีชีวิตใด ๆ ให้ได้มากที่สุด
ดังนั้นถ้าอยากให้วันนั้นมาถึงเร็วขึ้นก็คงหนีไม่พ้นการรอและหันมาร่วมมือกันพัฒนานวัตกรรมให้เกิดขึ้นไม่ว่าจะยากเพียงใดก็ตาม แต่สุดท้ายแล้วสิ่งที่ทำไปนั้นก็เพื่อประโยชน์และอนาคตที่สดใสของเพื่อนมนุษย์ด้วยกันเอง
เรียบเรียงโดย ทีมงาน Spaceth.co