ระบบ Global Navigation Satellite System หรือ GNSS หลาย ๆ คนอาจจะไม่คุ้นชื่อของมัน แต่เมื่อพูดถึง GPS ทุกคนจะรู้ทันทีว่ามันคือระบบระบุตำแหน่งด้วยดาวเทียม แต่หลายคนอาจจะยังไม่รู้ว่าระบบ GPS จริง ๆ แล้วเป็นเพียงแค่ส่วนหนึ่งของระบบ GNSS เท่านั้นเอง ระบบ GNSS คือ ระบบระบุตำแหน่งที่ครอบคลุมทั่วโลกซึ่งทั้งโลกเราตอนนี้มีระบบ GNSS ใหญ่ ๆ อยู่ 4 ระบบ คือ GPS, GLONASS, Galilleo และ BDS แล้วระบบ GNSS ทำงานอย่างไร สามารถติดตามได้ในบทความนี้
ระบบ GNSS ทำงานอย่างไร
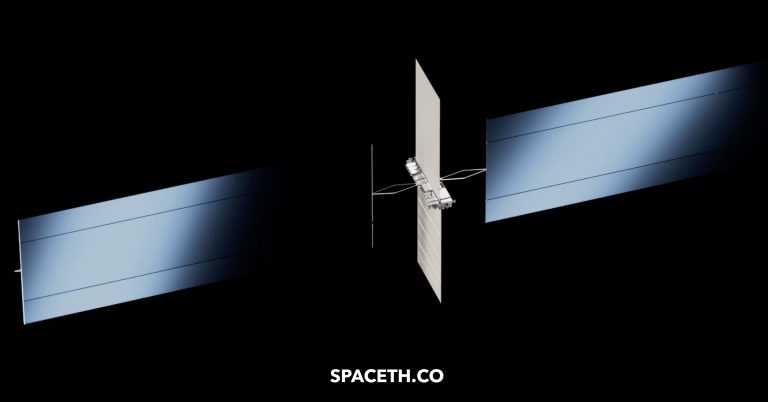
ระบบ GNSS คือโครงข่ายดาวเทียมที่ทำหน้าที่ Broadcast หรือส่งสัญญาณของตัวเองให้ Receiver หรือตัวรับสัญญาณตัวโครงข่ายดาวเทียมเองไม่ได้มีหน้าที่บอกตำแหน่งของตัวรับสัญญาณแต่อย่างใดแต่เป็นตัวรับสัญญาณเองที่บอกเราว่าเราอยู่ตรงไหน ยกตัวอย่างว่าเราอยู่ที่ประเทศไทย โครงข่าย GNSS ไม่ได้ส่งสัญญาณมาบอกเราว่า “เห้ย นายอยู่ประเทศไทย” แต่อย่างใดกลับกันดาวเทียมในโครงข่ายตะโกนบอกเราว่า “นาย เราอยู่ตรงนี้นะ” แต่เพราะว่าดาวเทียมในโครงข่าย GNSS แต่ละอันนั้นมีจำนวนเยอะพอสมควรทำให้แต่ละดาวเทียมต้องระบุตัวตนด้วยดังนั้นสัญญาณที่ดาวเทียมตะโกนมาก็จะเป็น “นาย เราคือดาวเทียม A เราอยู่ตรงนี้นะ” ซึ่งสิ่งที่ดาวเทียมส่งมาจริง ๆ นั้นก็คือพิกัดของตัวเองนั่นเองที่บอกว่าตัวดาวเทียมนั้นอยู่ตรงไหนในวงโคจร และสิ่งที่ส่งมาด้วยอีกอย่างก็คือ Time Stamp หรือเวลาที่แม่นยำมาก ๆ มาจากสิ่งที่เรียกว่า Atomic clock
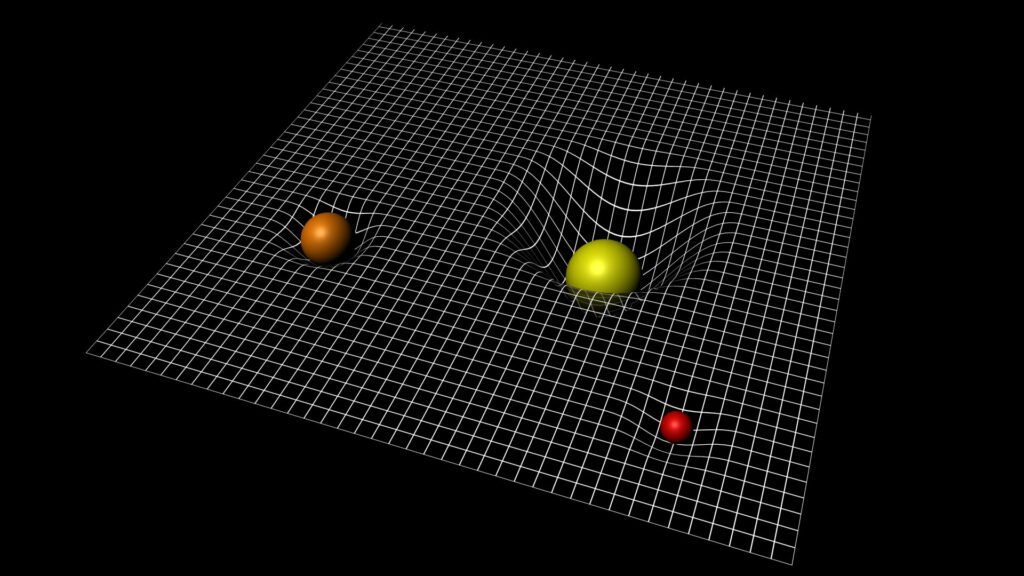
เรื่องหนึ่งที่ร้ายแรงกับ GNSS คือ เรื่องของ Gravitational time dilation ของทฤษฎีสัมพันธภาพของไอน์สไตน์ที่ระบุไว้ว่าเหตุการณ์ ๆ หนึ่งที่ถูกสังเกตการณ์จากผู้สังเกตการณ์สองคนที่อยู่ในพื้นที่ที่มี Gravitational potential ต่างกันจะเห็นเหตุการณ์ไม่พร้อมกัน โดยที่คนที่อยู่ในพื้นที่ที่มี Gravitational potential ต่ำกว่าเวลาจะเดินช้ากว่าในขณะที่ผู้สังเกตการณ์ในพื้นที่ที่มี Gravitational potential สูง เวลาจะเดินเร็วกว่า นั่นหมายความว่าอวกาศที่มี Gravitational potential ต่ำกว่าบนโลก เวลาจะเดินช้ากว่า ทำให้การใช้นาฬิกาที่มีความแม่นยำเพิ่มขึ้นและเที่ยงตรงมากขึ้นจะช่วยลด Random error ระหว่างการนับเวลาในดาวเทียมและช่วยให้การรีเซ็ตเวลากับสถานีภาคพื้นดินง่ายขึ้นและเที่ยงตรงมากขึ้น ที่ดาวเทียมต้องปรับค่าเวลาใหม่ตามสถานีภาคพื้นดินก็เพราะว่าเรืาองของ Time dilation นั่นเองที่เวลาในดาวเทียมจะค่อย ๆ คลาดเคลื่อนจากเวลาบนโลกไปทีละนิด ๆ ไปเรื่อย ๆ จนทำให้เวลาผิดเพี้ยนไปซึ่งเราจะมาอธิบายว่าทำไมแค่เวลาผิดเพียนนิดหน่อยมันจึงร้ายแรงมาก และนาฬิกาที่แม่นยำและเที่ยงตรงกว่าเดิมนี้มีชื่อว่า Atomic clock
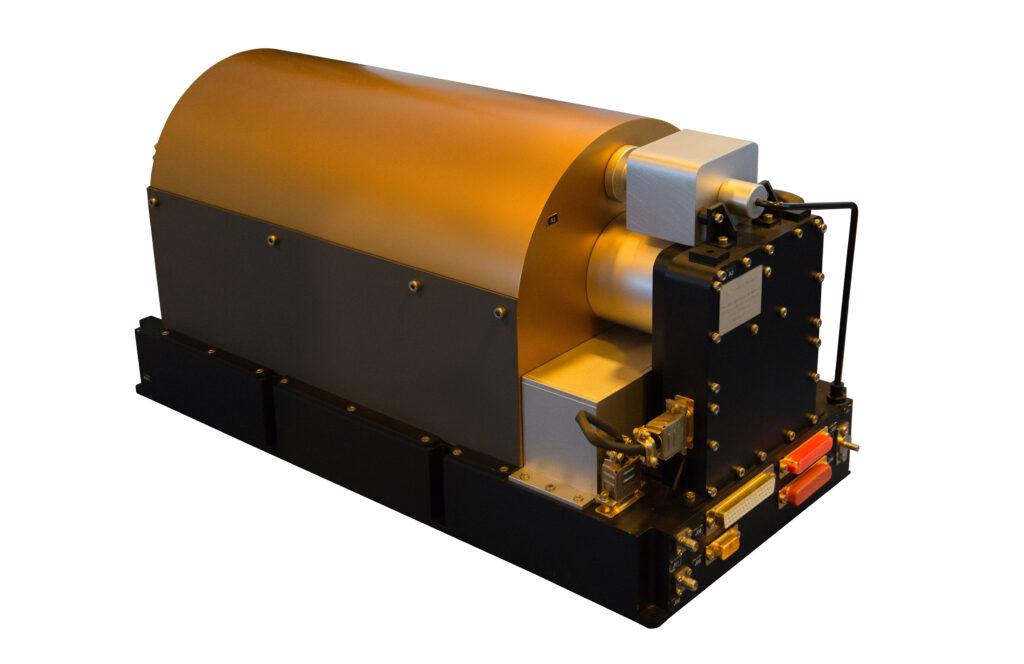
Atomic clock หรือนาฬิกาอะตอมเป็นนาฬิกาที่ถูกออกแบบมาให้มีความแม่นยำกว่านาฬิกาดิจิตอลทั่วไปที่เราใช้กันอยู่ทุกวันนี้เป็นอย่างมาก นาฬิกาอะตอมอาศัยการตรวจจับการสั่นพ้องของอะตอมธาตุ เช่น ซีเซียม 133 ซึ่งจะสั่นพ้องที่ 9,192,631,770 ครั้งใน 1 วินาที ด้วยการฉายคลื่นไมโครเวฟให้อะตอมเกิดการเปลี่ยนแปลง จากนั้นจึงใช้อุปกรณ์ตรวจจับว่าเมื่อไหร่ที่การสั่นพ้องนั้นครบ 9,192,631,770 ครั้ง จึงค่อยนับเป็น 1 วินาที ทำให้นาฬิกาอะตอมมีความแม่นยำสูงมากในระดับที่ใน Time Scale 1 ล้านปีจะคลาดเคลื่อนไปแค่ 1 วินาทีเท่านั้น ตัวอย่างของนาฬิกาอะตอมซีเซียม 133 เช่น FOCS-1

แน่นอนว่าเราไม่มีทางยัด FOCS-1 เข้าไปในดาวเทียม GNSS ได้หรอก เราจึงใช้นาฬิกาอะตอมที่มีขนาดเล็กกว่าอย่าง Hydrogen maser แทน มันทำงานโดยการใช้คุณสมบัติจากอะตอมของ Hydrogen เพื่ออ้างอิงค่าความถี่กับเวลาเข้าด้วยกันซึ่งมีความคลาดเคลื่อนเพียงแค่ 1 วินาทีใน 3 ล้านปี และนาฬิกาอีกแบบที่ราคาถูกลงหน่อยแต่แม่นยำในระดับหนึ่งก็คือ Rubidium clock ซึ่งใช้ Photodiode ในการตรวจแสงที่ผ่านเข้ามาระหว่างการ Discharge ของอะตอม Rubidium ซึ่งจะทำให้เราได้ความถี่ที่สามารถเอามาอ้างอิงกับเวลาได้เช่นกัน
เหตุผลที่ความแม่นยำของนาฬิกาบนดาวเทียม GNSS นั้นสำคัญมาก ๆ เป็นเพราะว่าตัว Time Stamp ที่ส่งมากับสัญญาณระบุตำแหน่งถูกใช้ในการคำนวณตำแหน่งบนตัวรับนั่นเองหากคลาดเคลื่อนไปเพียงแค่ระดับ nanosecond ก็อาจทำให้ตำแหน่งที่คำนวณออกมาได้คลาดเคลื่อนไปเป็นเมตร ๆ ได้นั่นเอง และหากเราไม่มีนาฬิกาที่แม่นยำระดับนี้เราจะไม่สามารถใช้ระบบระบุตำแหน่งของเราระหว่างขับรถหรืออยู่บนรถได้เลยเพราะว่ามันจะคลาดเคลื่อนแบบฉิบหายวายวอดมาก ๆ และนั้นก็เป็นเหตุผลว่าทำไมในบางครั้งถ้าเราตั้งเวลาโทรศัพท์ผิด GPS เราจะเจ๊งทันที
หลักการทำงานของ GNSS สามารถอธิบายได้ง่าย ๆ ด้วยทฤษฎี Trilateration ในระบบภาพ 2 มิติ โดยสมมติว่าเราอยู่สักที่ในประเทศไทยแต่เราไม่รู้ว่าเราอยู่ไหน เราก็เลยถามดาวเทียม ดาวเทียมบอกว่า “เราอยู่ตรงนี้ นายอยู่ห่างจากเรา 100 กิโลเมตร”
อ่าว อยู่ห่าง 100 กิโลเมตร แล้วมันตรงไหนวะ 100 กิโลเมตรทิศเหนือใต้ออกตกก็ยังไม่รู้ ก็เลยถามดาวเทียมอีกดวงเพิ่ม ดาวเทียมดวงที่ 2 ก็ตอบกลับมาว่า “เราอยู่ตรงนี้ นายอยู่ห่างจากเรา 120 กิโลเมตร” ที่นี้เราก็พอจะรู้แล้วว่าเราอยู่ห่างจากดาวเทียมดวงแรก 100 กิโลเมตร ดวง 2 120 กิโลเมตร
เมื่อวาดวงกลมออกมาล้อมรอบเพื่อนแต่ละคนเราก็จะได้จุดตัด 2 จุดที่อาจจะเป็นตำแหน่งของเราแต่เราก็ยังไม่แน่ใจก็เลยถามดาวเทียมเพิ่มอีกอัน ดาวเทียมตอบมาว่า “เราอยู่ตรงนี้ นายอยู่ห่างจากเรา 80 กิโลเมตร” เมื่อเราวาดวงกลมเพิ่มอีกหนึ่งวงเราก็จะได้แบบนี้
สุดท้ายเราก็จะได้จุดที่ตัดกับวงกลมทั้ง 3 วงและนั้นก็คือตำแหน่งที่แท้จริงของเรานั่นเอง หลักการเดียวกันสามารถนำไปประยุกต์ใช้กับระบบ GNSS ได้ แต่อย่างไรก็ตาม ความเป็นจริงแล้วดาวเทียมไม่ได้ส่งสัญญาณมาบอกว่าเราอยู่ห่างจากดาวเทียมเท่าไหร่เพราะถ้าทำอย่างงั้นมันจะยุ่งยากขึ้นมาก ๆ แต่ไม่ทำก็ยุ่งยากเหมือนกัน (ยุ่งยากคนละแบบ) ซึ่งเราจะอธิบายในส่วนต่อไป
เมื่อนำหลักการ Trilateration มาใช้ในระบบ GNSS มันก็จะทำงานคล้าย ๆ กัน โดยที่หลักการทำงานของระบบ GNSS คือการ Broadcast หรือกระจายสัญญาณของตำแหน่งของตัวเองพร้อม Time Stamp แบบ Omnirectional ลงสู่พื้นโลกโดยไม่ได้เล็งไปแค่อุปกรณ์ไหนอุปกรณ์หนึ่งแต่เล็งไปทั้งพื้นที่เลย เช่น ดาวเทียมดวงนี้อาจจะเล็งไปที่แถบเอเชียสัญญาณจากดาวเทียมดวงนั้นก็จะครอบคลุมทั้งแถบเอเชียไปเลย การที่ GNSS จะทำงานได้อย่างน้อยจะต้องมีดาวเทียมในระบบ 3 ดวงขึ้นไปจึงจะสามารถระบุตำแหน่งได้ บวกอีก 1 เป็น 4 สำหรับใช้ในการ Sync เวลาใน Atomic clock
เมื่อดาวเทียม Broadcast ตำแหน่งและเวลาของตัวมันเองด้วยคลื่นวิทยุซึ่งเดินทางด้วยความเร็วแสงแต่ความเร็วแสงก็ไม่ได้หมายความว่าสัญญาณจะมาถึงเราทันทีทันใดแต่จะมีดีเลย์ระหว่างการส่งในระดับ nanoseconds – microseconds ซึ่งการดีเลย์นี้เองที่ทำหน้าที่เป็นตัวบอกว่าเราอยู่ห่างจากตัวดาวเทียมเท่าไหร่แต่ก่อนที่เราจะรู้ว่าเราห่างจากดาวเทียมเท่าไหร่ เราจะต้องรู้ก่อนว่าดาวเทียมมันอยู่ตรงไหน หลายคนอาจจะมีคำถามว่ามันเป็นดาวเทียมระบุตำแหน่งมันก็ต้องรู้ตำแหน่งตัวเองสิ แต่ไม่เลย ดาวเทียม GNSS ไม่มีหน้าที่ในการ Track ตำแหน่งของตัวมันเอง แต่การติดตามตำแหน่งของดาวเทียมถูกกระทำโดยสถานีภาคพื้นโลกซึ่งใช้เรดาร์, Signal Doppler, และการสะท้อนแสงเลเซอร์กับดาวเทียมแต่ละดวงในการหาสิ่งที่เรียกว่า Keplerian orbital elements
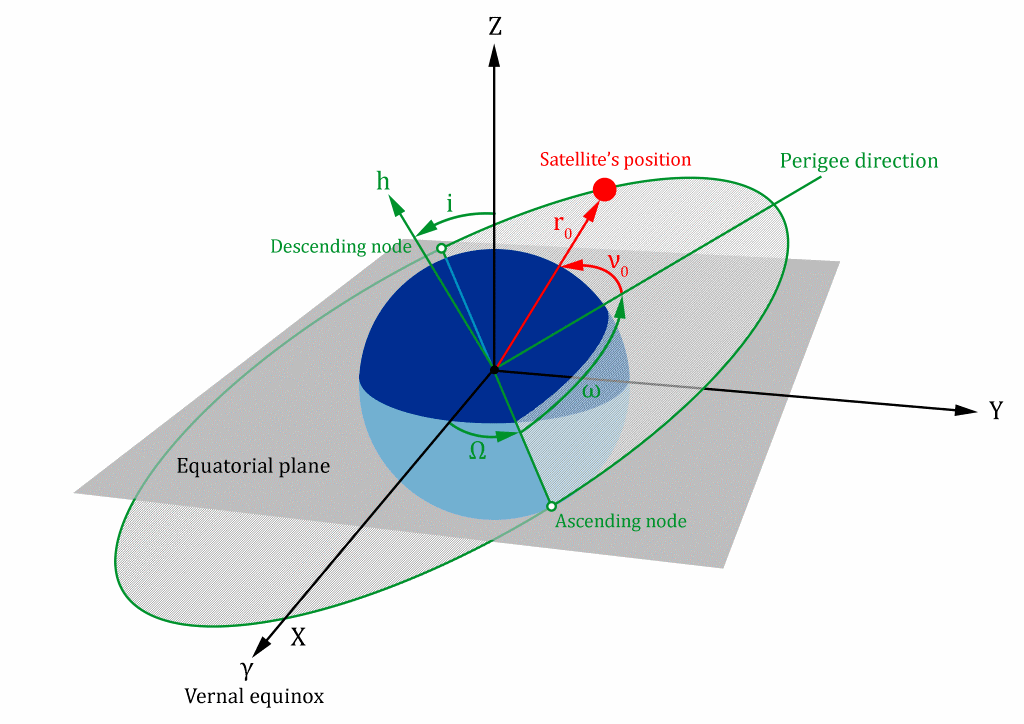
Keplerian orbital elements คือ ค่าต่าง ๆ ที่ใช้ระบุคุณสมบัติของวงโคจรของวัตถุ ๆ หนึ่ง กับ Celestial body อันหนึ่ง ซึ่งค่าทุกค่าอันนี้จำเป็นต่อการสร้างตารางข้อมูลตำแหน่งของ GNSS Constellation ในการระบุตำแหน่ง
- i – Inclination (degress) คือ ค่าที่ใช้ระบุค่าความเอียงของแผ่นวงโคจร (Orbital plane) อ้างอิงกับเส้นศูนย์สูตร
- e – Eccentricity คือ ค่าที่ใช้ระบุความรีของวงโคจร โดย e = 0 คือวงโคจรวงกลมสมบูรณ์ส่วน ตั้งแต่ 0 ขึ้นไป ถึง 1 คือวงโคจรวงรี (ค่ายิ่งมากยิ่งรี แต่ไม่เกิน 1)
- a – Semi-major Axis ค่าที่ใช้ในการระบุขนาดของวงโคจรอ้างอิงจาก Celestial body
- v – True Anomaly (degrees) คือ ค่าที่ใช้ในการระบุมุมระหว่างตำแหน่งของ Perigee/Periapsis และตำแหน่งของวัตถุในวงโคจร ณ ตอนนั้น ๆ
- Ω – Right Ascension of the Ascending Node (degrees) คือ ค่ามุมระหว่าง Vernal equinox และ จุดที่ Orbital plane ข้าม Equatorial plane เปลี่ยนจากทิศใต้เป็นทิศเหนือ หรือ Ascending Node นั้นเอง
- ω – Argument of Perigee (degrees) คือ ค่ามุมระหว่าง Ascending Node กับ Perigee/Periapsis
*Perigee/Periapsis คือจุดที่วงโคจรอยู่ใกล้ Celestial body มากที่สุดของวงโคจรนั้น ๆ
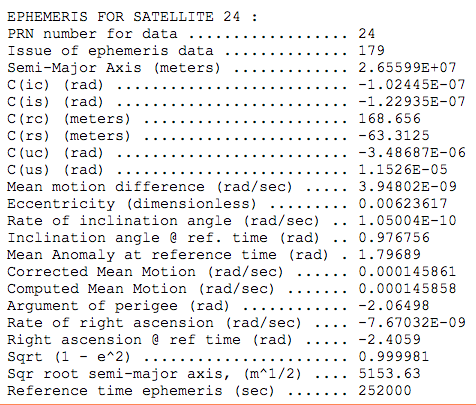
ตำแหน่งพวกนี้จะถูกคำนวณโดยสถานีภาคพื้นโลกแล้วจึงส่งกลับขึ้นไปบนดาวเทียม GNSS ในรูปของชุดข้อมูลที่เรียกว่า Ephemeris แล้วดาวเทียม GNSS จึงส่งข้อมูล Ephemeris ให้กับ Receiver ผ่านการ Broadcast สัญญาณอีกที ซึ่งเจ้า Ephemeris ไม่จำเป็นต้องคำนวณตลอดเวลาและสามารถชุดข้อมูลชุดเดิมโดยไม่มีการ Update ได้เป็นเวลาประมาณ 4 ชั่วโมงหลังจากนั้นดาวเทียมจะต้อง Update ชุดข้อมูล Ephemeris จากสถานีภาคพื้นโลกใหม่เพื่อป้องกันการคลาดเคลื่อน ถ้าใช้ชุดข้อมูลเดิมอาจทำให้ตำแหน่งผิดพลาดเพราะว่าดาวเทียม GNSS ก็ไม่รู้ว่าตัวเองอยู่ตรงไหนก็เลยส่งข้อมูลเก่ามาให้ ส่วนตัว Receiver ก็ไม่รู้ว่ามันเป็นข้อมูลเก่านึกว่าเป็นอันใหม่ก็ใช้ไปซะอย่างนั้นสุดท้ายก็คือตำแหน่งคลาดเคลื่อนนั่นเอง
ดังนั้นเมื่อดาวเทียม GNSS รู้ตำแหน่งของตัวเองแล้วจากชุดข้อมูล Ephemeris มันก็จะทำการ Broadcast ข้อมูล Ephemeris ไปที่พื้นโลกใน Line of Sight ของมันพร้อม Time Stamp ว่ามัน Broadcast ที่เวลาเท่าไหร่จากนาฬิกาอะตอม เมื่อ Receiver หรือตัวรับสัญญาณได้รับสัญญาณจากดาวเทียมที่ Broadcast ตำแหน่งและเวลาของตัวเองมา ตัว Receiver ก็จะทำการ Process ข้อมูลจากดาวเทียมโดยการนำข้อมูลมาดูว่าดาวเทียม Broadcast ที่เวลาเท่าไหร่แล้วมันมาถึงตอนไหนเมื่ออ้างอิงจากเวลาบน Receiver

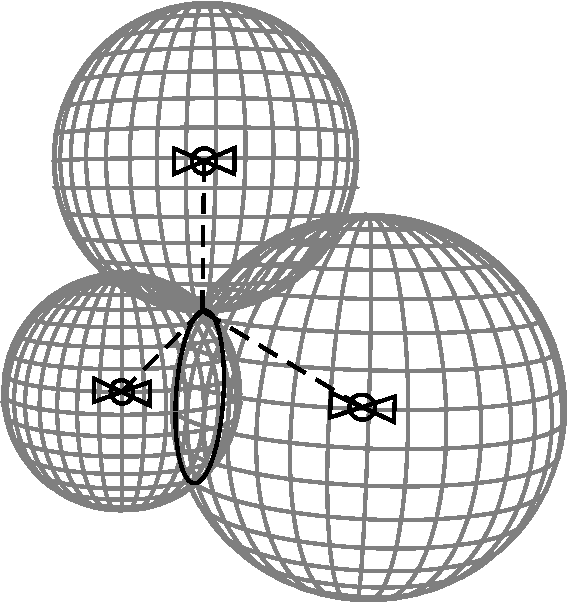
เมื่อเรารู้ว่าสัญญาณจากดาวเทียมที่เดินทางด้วยความเร็วแสงใช้เวลาเท่านี้ในการเดินทางมาหาเรา เราก็จะสามารถคำนวณย้อนกลับได้ว่าดาวเทียมอยู่ห่างจากเราเท่าไหร่ (ฟังเหมือนง่าย ๆ แต่จริง ๆ เป็นสมการที่ยาวมากเพราะว่ามีเรื่องของ Time dilation ที่ต้องคำนวณด้วยเพื่อป้องกันความคลาดเคลื่อน) และมันก็จะทำแบบเดียวกันกับทุก ๆ ดาวเทียมที่มันได้รับสัญญาณ มี 10 ดวงก็คำนวณ 10 ดวง แต่อย่างน้อย ๆ ต้องมี 4 ดวง (3 กับอีกหนึ่งดวงในการ Sync เวลา) เมื่อเรารู้ว่าเราอยู่ห่างจากดาวเทียมแต่ละดวงเท่าไหร่เราก็จะสามารถวาดทรงกลมจำลองตำแหน่งที่เป็นไปได้ของเราได้ด้วยวิธี Trilateration
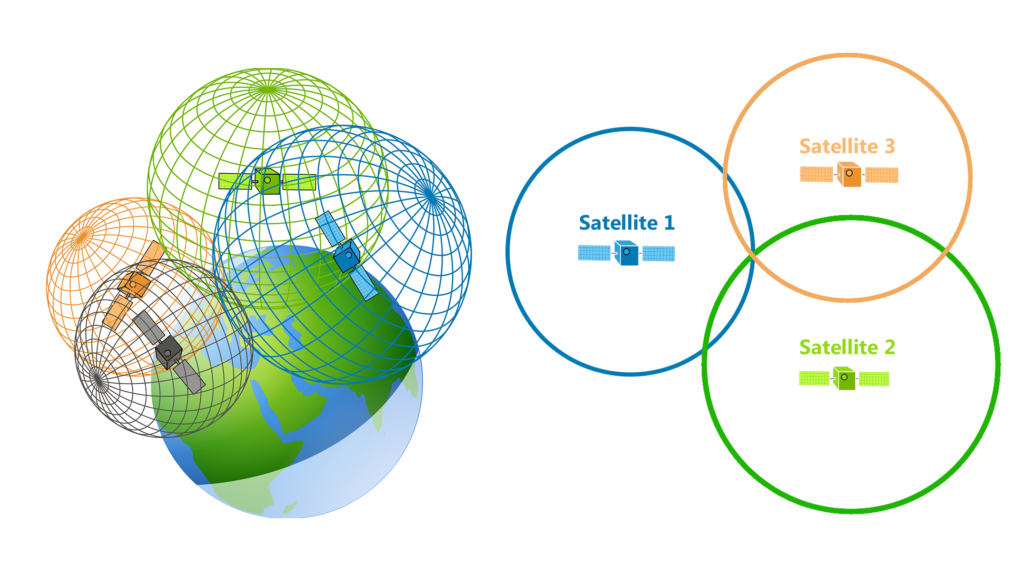
สิ่งที่ได้ก็คือทรงกลมสามอันที่มีจุดตัดกันระหว่างทรงกลมทั้งสามอันอยู่จุดหนึ่งและจุดนั้นก็คือตำแหน่งของเรานั่นเองเหมือนกับแบบในสองมิติเป๊ะ และนั้นก็คือทั้งหมดของ GNSS ซึ่งเป็นอะไรที่ไม่ได้ซับซ้อนมากแต่กลับมีประโยชน์มหาศาลแก่มวลมนุษยชาติเลยทีเดียว (ทางการทหารด้วย // ผิด ๆ)
แล้ว GNSS ที่เราใช้กันทุกวันนี้มีที่มายังไงและทำงานยังไง
GNSS หลัก ๆ ที่เราใช้กันอยู่ทุกวันนี้ คือ Global Positioning System หรือที่เรารู้จักกันในชื่อ GPS มีชื่อเดิมว่า NAVSTAR GPS เป็นระบบนำทางผ่านคลื่นวิทยุที่ดูแลโดย Space Force ของสหรัฐอเมริกา ณ ตอนนี้ (เดิมดูและโดยกระทรวงกลาโหมสหรัฐ US DoD) GPS เริ่มต้นในปี 1973 เมื่อสหรัฐอเมริกาต้องการจะก้าวข้ามขีดจำกัดในการระบุตำแหน่งแบบเดิม ๆ ด้วยระบบใหม่อย่าง Radio-navigation system แต่ก่อนหน้านั้นในปี 1955 มีการทดลองทฤษฎีสัมพันภาพทั่วไปว่าเวลาจากนาฬิกาอะตอมบนดาวเทียมอย่างในดาวเทียม GPS จะเร็วกว่านาฬิกาบนโลกประมาณ 38 microseconds ต่อวัน ตามทฤษฎีสัมพันธภาพทั่วไปและพิเศษซึ่งนั้นจะทำให้ตำแหน่งที่คำนวณได้คลาดเคลื่อนไปวันละ 10 กิโลเมตรเลยทีเดียว (แต่ปัญหานี้ก็ถูกแก้ใขในภายหลังด้วยการออกแบบระบบของ GPS ให้แก้ปัญหานี้ได้)
ในปี 1972 USAF Central Inertial Guidance Test Facility เริ่มทดสอบต้นแบบของดาวเทียม GPS แบบ Y configuration 4 ตัว ถือเป็นการเริ่มต้นโครงการ GPS อย่างเป็นทางการ จนกระทั่งในปี 1978 ที่สหรัฐอเมริกาเริ่มปล่อยดาวเทียม GPS ชุดแรกเรียกว่า Block I ขึ้นสู่วงโคจรจำนวน 11 ดวงระหว่างปี 1978 – 1985 ซึ่งตอนนั้นระบบ GPS ยังเปิดให้ใช้แค่ในทางการทหารเท่านั้นเช่นการระบุตำแหน่งศัตรู การสำรวจพื้นที่ การสอดแนมต่าง ๆ ล้วนผ่านระบบ GPS ทั้งสิ้น รวมถึงการนำทางระบบ Missile ต่าง ๆ อย่าง ICBM, Cruise missiles และระบบป้องกันภัยต่าง ๆ ของสหรัฐอเมริกา ประชาชนไม่มีสิทธิ์ใช้งานระบบ GPS
จนกระทั่งปี 1983 เครื่องบินโดยสารของสายการบิน Korean Airline KAL 007 พร้อมผู้โดยสาร 269 คน เผลอเข้าไปใน Prohibited airspace ของโซเวียตโดยไม่ได้ตั้งใจจาก Pilot error ที่ไม่ได้ตรวจเช็คว่า Heading หันไปถูกทางทำให้เส้นทางการบินเบี่ยงขวาเข้าไปในน่านฟ้าต้องห้ามของโซเวียต (สมัยนั้น คือ ATC ในหอควบคุมการบินจะบอก Heading ว่าต้องหันไปทางไหน) และถูกเครื่องบินขับไล่ของโซเวียตยิงตกในที่สุด (ช่วงนั้นเป็นช่วงของสงครามเย็นพอดี การที่มีเครื่องบินอะไรแปลก ๆ บินเข้ามาในน่านฟ้าจึงเป็นเรื่องที่ร้ายแรงมาก)
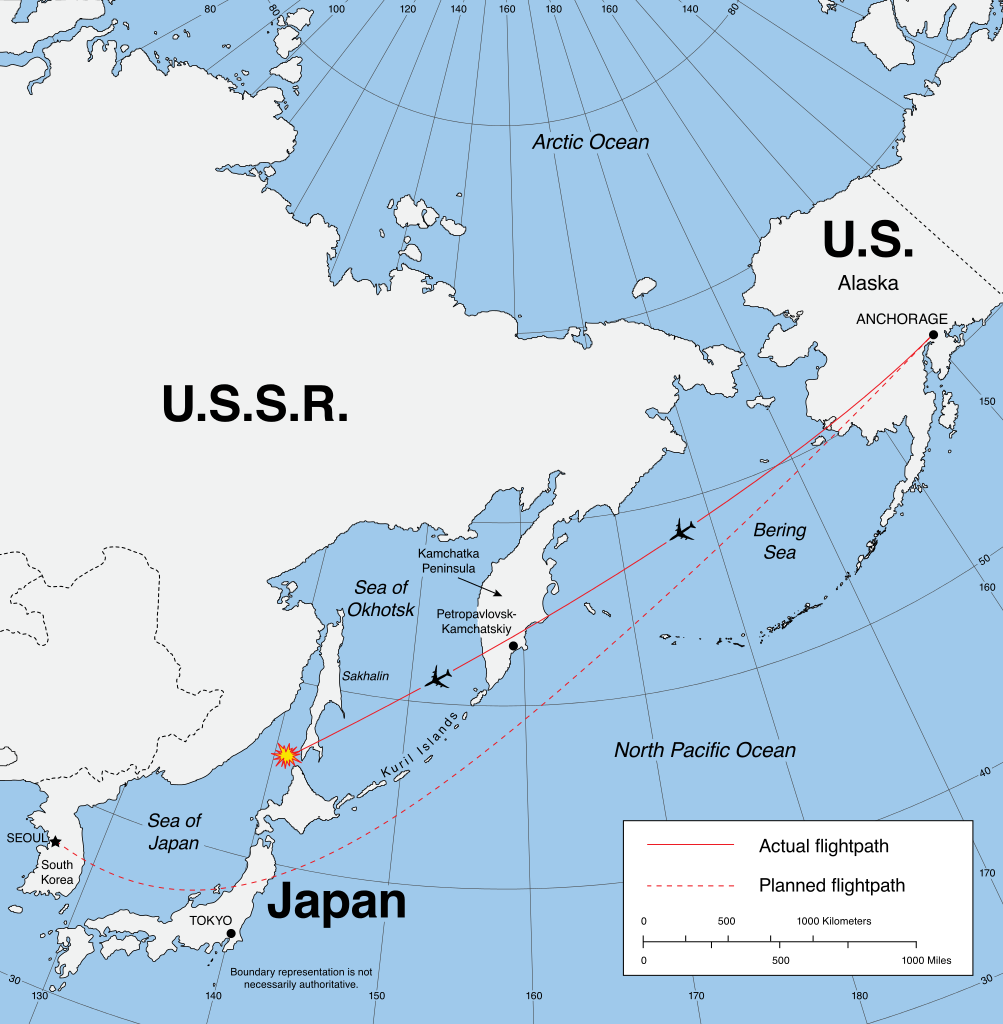
เหตุผลส่วนหนึ่งที่ KAL 007 ออกนอกเส้นทางเป็นเพราะว่าในตอนนั้นไม่มีระบบนำทางที่ Reliable พอในการนำทางนักบินไปสู่จุดหมาย ในตอนนั้นการนำทางทำได้โดยการใช้เสาส่งสัญญาณ Beacon ที่เรียกว่า Localizer (LOC) ในการนำทางผ่าน Autopilot และ VOR (VHF Omnidirectional Range) ซึ่งระบบจะบินไปตาม Waypoint ที่ติดตั้งเสากระจายสัญญาณจนกว่าจะถึงที่หมายซึ่งสามารถเกิดความผิดพลาดขึ้นได้ง่ายโดยเฉพาะกับความประมาท นักบินของ KAL 007 ไม่ได้เช็คโหมดของ Computer INS (Inertial Navigation System) ทำให้มันออกนอกเส้นทางไปจนถูกยิงตก หลังจากเกิดเหตุได้ไม่นาน ประธานาธิบดี Ronald Reagan จึงตัดสินใจเปิดให้ทุกคนใช้ระบบ GPS ได้ฟรีเพื่อพัฒนาระบบนำทางทั่วโลก เช่น ในทางการบิน

ในปี 1993 ดาวเทียม GPS ทั้งหมด 24 ดวงครอบคลุมพื้นที่ส่วนใหญ่ของโลก (Initial Operational Capabillity) ทำให้ GPS เป็นระบบ GNSS อย่างเต็มตัว ปัจจุบันมีดาวเทียม GPS ทั้งหมด 31 ดวงที่ยังถูกใช้งานอยู่ใน Medium Earth Orbit (MEO) จากทั้งหมด 72 ดวงโดย Block ล่าสุดที่ส่งขึ้นไปในวงโคจรคือ Block IIIA ในปี 2018 ทั้งหมด 2 ดวง และ Block ที่กำลังจะตามมาคือ IIIF อีก 22 ดวง GPS Constellation อยู่ใน MEO ที่ความสูง 20,180 กิโลเมตรเหนือพื้นโลกทั้งหมดแต่อยู่ใน Orbital plane ที่แตกต่างกันจำนวน 6 planes โคจรอยู่รอบโลก ครอบคลุมพื้นผิวทั่วโลกด้วย Line of Sight อย่างน้อยสุดคือ 6 ดาวเทียม
ระบบ GPS สามารถแบ่งได้เป็น 3 segments คือ Space segment, Control segment และ User segment
Space segment คือ Constellation ที่ประกอบไปด้วยดาวเทียม GPS ตั้งแต่ 24 ถึง 32 ดวงขึ้นไปใน Medium Earth Orbit อยู่ใน 6 Orbital planes แต่ละ Orbital planes มีดาวเทียมประจำอยู่ 4 ดวง ทำให้ Line of Sight จากผิวโลกไม่ว่าจะเป็นที่ไหนก็ตามจะมีดาวเทียมอยู่บนท้องฟ้าอย่างน้อย 6 ตัวในการระบุตำแหน่ง
ดาวเทียมแต่ละดวงจะโคจรผ่านที่เดิมแทบทุกวันทำให้ง่ายต่อการตั้งสถานีภาคพื้นในการ Update ชุดข้อมูล Ephemeris ในปี 2019 ใน Constellation ทั้งหมด 31 ดวง โดยที่ 24 ดวงกำลังถูกใช้อยู่ส่วนที่เหลือถูกสำรองไว้
Control segment ประกอบไปด้วย Master Control Station (MCS), Alternative MCS, 4 Dedicated Ground antennas, 6 Dedicated Monitor Stations
Control segment เป็นส่วนที่ควบคุมระบบทุกอย่างของ GPS Constellation เช่น การ Update Ephemeris การแก้ไขวงโคจรต่าง ๆ ของดาวเทียม ซึ่งปกติจะอัตโนมัติ แต่สิ่งที่ไม่อัตโนมัติอย่างเช่นการแก้ไขวงโคจรจำเป็นต้องทำโดย Control Segment เริ่มต้นจากการ Mark ดาวเทียมที่จะแก้ไขวงโคจรให้เป็น “Unhealthy” หมายความว่าสัญญาณที่มาจากดาวเทียมดวงนี้ Receiver จะไม่ใช้ (ไม่งั้น Receiver เมา) แล้วแก้ไขวงโคจร จากนั้นจึง Update Ephemeris ใหม่ให้ตรงกับวงโคจร ปัจจุบันระบบ Next Generation GPS Operation Control System (OCX) ซึ่งเป็นระบบใหม่ที่จะใช้กับดาวเทียม GPS ชุดใหม่ ซึ่งจะทำหน้าที่ควบคุมย่านความถี่สัญญาณใหม่ในดาวเทียม GPS รุ่นใหม่ แต่ก็ยัง Support legacy อย่างดาวเทียม GPS รุ่นเก่าอยู่เพื่อเพิ่มจำนวนดาวเทียมใน Constellation

ส่วนสุดท้ายก็คือ User segment ซึ่งก็คือ Receiver นั่นเองอย่างในอุปกรณ์ที่ต้องใช้ GPS ต่าง ๆ เช่น โทรศัพท์ ระบบนำทางต่าง ๆ ซึ่งเป็นชิปซึ่งใช้รับสัญญาณ GPS โดยเฉพาะและในชิปก็จะมีนาฬิกาชนิด Crystal oscillator อย่าง Quartz อยู่เพื่อระบุเวลาให้แม่นยำขึ้น ซึ่งปกติชิป GNSS จะแยกใครแยกมัน GPS ก็ส่วนของ GPS ส่วน GLONASS ก็ส่วนของ GLONASS ใช้ด้วยกันไม่ได้ยกเว้นแต่ชิปจะถูกออกแบบให้สามารถรับสัญญาณทั้งสองพร้อมกันได้ แต่ถ้าดันเป็น GNSS ที่มีความถี่ทับกันอย่าง BDS ของจีน กับ Galileo ของ ESA ก็อาจจะใช้สองคลื่นพร้อมกันไม่ได้เลย
ระบบ GPS มีสิ่งที่พิเศษกว่า GNSS ทั่วไปขึ้นมาหน่อยเรียกว่า A-GPS หรือ Assisted/Augmented GPS ซึ่งช่วยเพิ่มความแม่นยำในที่ ๆ มีสัญญาณ GPS อ่อน ซึ่ง A-GPS ทำงานผ่าน Carrier หรือบริการมือถือของเราอย่าง 3G และ 4G หรือ Wi-Fi Node เพื่อเพิ่มความแม่นยำในการหาตำแหน่ง อย่างที่ได้อธิบายไปว่าเราจะหาตำแหน่งของตัวเราเองได้ก็ต่อเมื่อเรารู้ตำแหน่งและระยะทางของดาวเทียม GNSS อย่างน้อย 4 ตัว ซึ่งตำแหน่งของดาวเทียมก็คือชุดข้อมูล Ephemeris ที่ดาวเทียม Broadcast มาพร้อม Time stamp ส่วนระยะทางเราก็หาได้โดยการคำนวณย้อนกลับเวลาที่สัญญาณใช้ในการเดินทางจากดาวเทียมมาหาเรา ซึ่งบางทีเราอยู่ในที่อับสัญญาณมาก ๆ เช่น หุบเขา ในตึก ในป่า ซึ่งสัญญาณไม่สามารถทะลุมาได้หรืออ่อนมาก ๆ ทำให้มันไม่สามารถรับชุดข้อมูล Ephemeris มาได้ หรือได้รับมาไม่ถึง 4 ดวง ทำให้ไม่สามารถคำนวณหาตำแหน่งตัวเองได้ มันก็จะต้องรอจนกว่ามันจะมีชุดข้อมูล Ephemeris จากดาวเทียมอย่างน้อย 4 ดวงซึ่งบางทีข้อมูลที่ส่งมามันดันได้แต่ Ephemeris อันเก่า อันใหม่มาไม่ถึงมันก็จะทำให้ตำแหน่งที่คำนวณได้คลาดเคลื่อน จึงเป็นที่มาของชุดข้อมูลอีกชนิดที่เรียกว่า Almanac ที่อาจจะ 30 วันค่อย Update ข้อมูลใหม่ (แล้วแต่ผู้ให้บริการ)
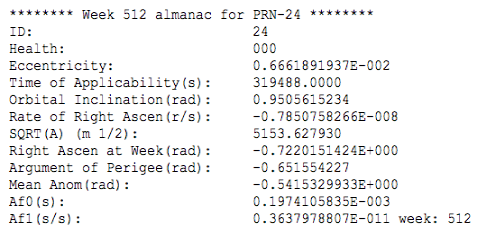
จะเห็นได้ว่า Almanac หน้าตาคล้าย Ephemeris เป๊ะ แต่มันดันระบุเป็น Week นั้นเป็นเพราะว่านาน ๆ ที Almanac จะ Update ข้อมูล แตกต่างกับ Ephemeris
Almanac เป็นชุดข้อมูลตำแหน่งของดาวเทียมที่ช่วยให้ Receiver พอรู้ตำแหน่งดาวเทียม GPS คร่าว ๆ เพื่อช่วยสร้างลิสต์ของ Visible satellite ที่อยู่ใน Line of Sight ขึ้นมาซึ่งช่วยลดเวลาในการจับสัญญาณ GPS ลงซึ่งเจ้า Almanac นี้เองไม่ได้ส่งมาจากดาวเทียม GPS แต่ส่งมาจากเสาสัญญาณของผู้ให้บริการมือถือของเราซึ่งเป็นชุดข้อมูลที่แม่นยำน้อยกว่า Ephemeris แต่ก็ใช้งานได้ เมื่อนำ Ephemeris กับ Almanac มารวมกันเราก็จะสามารถ Acquire Signal ของ GPS ได้เร็วขึ้น สมมุติว่าเราไม่ได้เปิด GPS นาน ๆ แล้วเข้าไปในป่าหรือที่ไหนก็แล้วที่มันอับสัญญาณ นาน ๆ ในที่นี้หมายถึงจนกว่าข้อมูล Ephemeris ที่ดาวน์โหลดมาจาก GPS Constellation ล่าสุดจะหมดอายุซึ่งปกติก็คือ 4 ชั่วโมง หลังจากนั้น Ephemeris ทั้งหมดจะ Invalid และใช้ไม่ได้ทำให้ต้องดาวน์โหลดใหม่ซึ่งพอเปิด GPS อีกทีนึงในที่อับสัญญาณ Receiver มันจะดาวน์โหลด Ephemeris ได้ช้ามาก ๆ เพราะมันต้องค่อย ๆ ดาวน์โหลดทีละดวง ๆ บวกกับสัญญาณที่อ่อนทำให้มันต้องฟังสัญญาณซ้ำเพื่อความแม่นยำของ Ephemeris กว่าจะโหลด Ephemeris หมด และ Acquire Signal ได้ก็ประมาณ 10 นาที ซึ่งถ้าเป็นเหตุฉุกเฉิน เจ๊งแน่
A-GPS จึงเข้ามามีบทบาทในการส่ง Almanac ให้ Receiver ใช้ชั่วคราวในการ Acquire Signal ในสถานที่ที่สัญญาณ GPS อ่อน แต่ทั้งนี้ปกติเราก็ใช้ A-GPS กันอยู่ทุกวันอยู่แล้วโดยที่เราไม่รู้ตัว แค่เราเปิด 4G แล้วใช้ GPS ไปด้วยก็คือเรากำลังใช้ A-GPS ซึ่งก็คือ Almanac + Ephemeris ร่วมกันอยู่ซึ่งทำให้การระบุตำแหน่งของเราแม่นยำขึ้นและรวดเร็วขึ้นนั่นเอง
สุดท้ายนี้ไม่ใช่แค่ GPS ที่ใช้หลักการทำงานแบบนี้เพราะเกือบทุกระบบ GNSS ก็ใช้หลักการทำงานคล้าย ๆ กันเพราะว่ามีต้นแบบมาจาก GPS ทั้งสิ้นให้ไม่ว่าจะเป็น GLONASS, Galileo หรือ BDS ก็สามารถใช้ร่วมกันกับ GPS ได้ทั้งสิ้นโดยไม่ต้องมานั่งพัฒนาระบบบนอุปกรณ์แต่ละอุปกรณ์ใหม่ (ยกเว้น BDS กับ Galileo ที่ดันใช้คลื่นความถี่ทับกัน
เรียบเรียงโดย ทีมงาน SPACETH.CO
อ้างอิง