เร็ว ๆ นี้เราอาจจะได้ยินข่าวเกี่ยวกับการกลับมาของยาน Hayabusa2 ที่นำตัวอย่างของดาวเคราะห์น้อยกลับโลก (asteroid sample-return mission) ของ Japan Aerospace Exploration Agency หรือ JAXA ซึ่งในบทความนี้เราจะมาพูดถึงรายละเอียดของภารกิจนี้แบบเจาะลึก
ก่อนอื่นต้องเกริ่นก่อนว่าชื่อยาน Hayabusa2 นั้นไม่ได้อยู่ ๆ JAXA ก็อยากใส่เลข 2 เข้ามาเพราะมันเป็นเลขมงคลหรืออะไรทั้งนั้นแต่ก็เพราะว่ามันเป็นยานรุ่นลูกนั่นเองมันถึงมีเลขสอง นั่นหมายความว่าเรามี Hayabusa หรือ Hayabusa 1 นั่นเอง
Hayabusa 1 ทำอะไร และความซวยที่เกิดขึ้น
ภารกิจ Hayabusa1 (จริง ๆ เรียกว่า Hayabusa เฉย ๆ แต่เพื่อป้องกันการสับสนระหว่าง 1 กับ 2 จึงจะเรียกว่า Hayabusa1) Hayabusa ในภาษาญี่ปุ่นแปลว่า Perigene falcon หรือ เหยี่ยวเพเรกริน (はやぶさ) Hayabusa1 เป็นยานสำรวจแบบหุ่นยนต์ (Robotic spacecraft) พัฒนาโดย JAXA เดิมมีชื่อว่า Muses-C ย่อมาจาก Mu Space Engineering Spacecraft C แต่เปลี่ยนชื่อในภายหลังตอนปล่อย
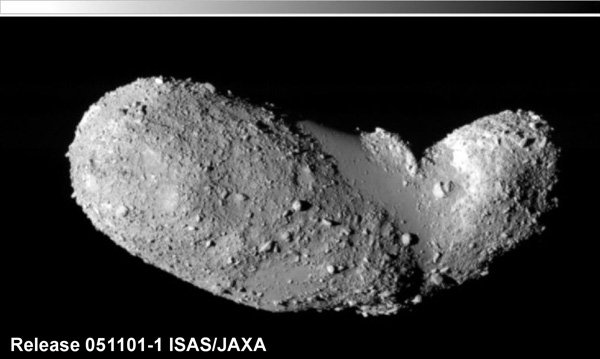
ภารกิจหลักของ Hayabusa1 คือ การเก็บตัวอย่างพื้นผิวของดาวเคราะห์น้อยใกล้โลก (near-Earth asteroid/object: NEO) ชื่อว่า 25143 Itokawa และนำกลับโลกเพื่อทำการวิเคราะห์ตัวอย่างที่เก็บได้ Hayabusa1 ถูกปล่อยเมื่อวันที่ 9 พฤษภาคม 2003 และ Rendezvous กับ Itokawa ช่วงกลางเดือน กันยายน 2005 ซึ่งเมื่อเดินทางถึง Itokawa ยาน Hayabusa1 ก็ทำการเก็บข้อมูลทางด้านกายภาพของดาวเคราะห์น้อย เช่น รูปร่าง การหมุน ภูมิประเทศ สี ส่วนประกอบ และความหนาแน่น จนกระทั่งในเดือน พฤศจิกายน 2005 ยาน Hayabusa 1 ลงจอดแบบ Touch-And-Go ที่พื้นผิวของดาวเคราะห์น้อย Itokawa รวมทั้งเก็บตัวอย่างของดาวเคราะห์น้อยมาด้วย
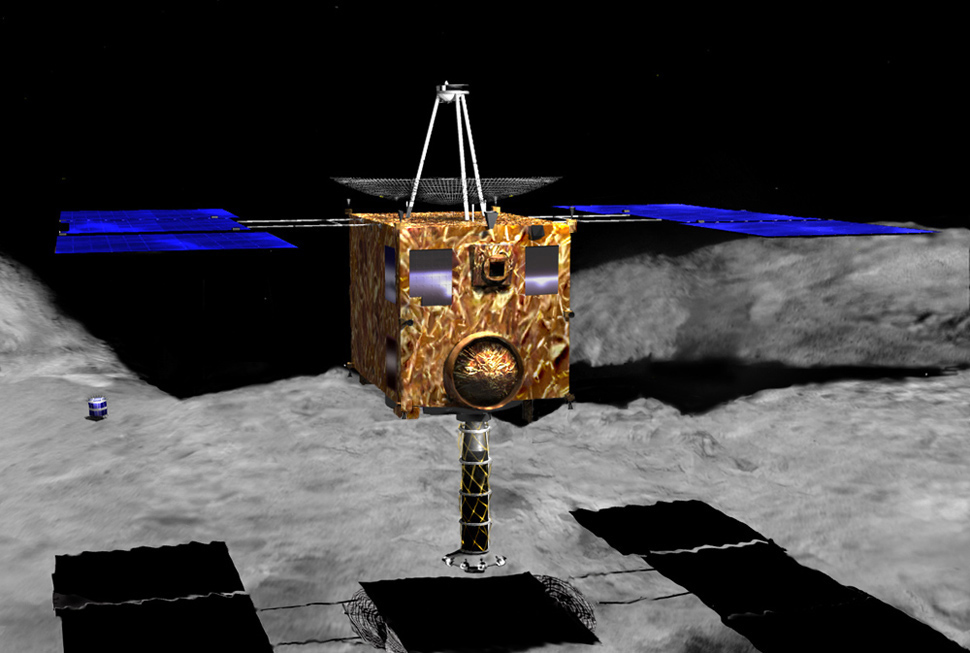
นอกจากนี้ยาน Hayabusa1 ยังมี Lander ขนาดเล็กที่เรียกว่า MINERVA (Micro-Nano Experimental Robot Vehicle for the Asteroid) ติดไปด้วยน้ำหนักเพียง 591 กรัม ซึ่งยาน Hayavusa1 จะปล่อย Lander นี้ลงบนพื้นผิวของดาวเคราะห์น้อยเพื่อให้มันทำการสำรวจพื้นผิวต่อโดย MINERVA เป็น Lander ที่พิเศษกว่าปกติคือมันสามารถกระโดดเพื่อเคลื่อนที่ได้เพราะว่า Itokawa นั้นมีแรงโน้มถ่วงน้อยมาก ๆ
แต่อย่างไรก็ตามแรงโน้มถ่วงที่น้อยนี้ก็ทำให้ภารกิจ MINERVA ล้มเหลวตั้งแต่ยังไม่เริ่ม เพราะว่าเมื่อวันที่ 12 พฤศจิกายน 2005 Hayabusa1 กำลังเพิ่มระดับหลังจากการเก็บตัวอย่างเสร็จสิ้น ขณะเดียวกันวิศวกรกำลังส่งคำสั่งปลด Lander ออกจาก Hayabusa1 เพื่อให้มันตกลงดาวเคราะห์น้อยแต่โชคร้ายไปหน่อยที่คำสั่งมันมาถึงช้าเกินไป ตอนที่คำสั่งเดินทางมาถึง Hayabusa1 ก็อยู่ที่ความสูงเกือบ 44 เมตรแล้ว ซึ่งดูเหมือนน้อย แต่เพราะว่า Itokawa มีแรงโน้มถ่วงน้อยมาก ๆ ทำให้ MINERVA หลุดออกจากอำนาจแรงโน้มถ่วงของ Itokawa และลอยหลุดออกไปนอกอวกาศแทน
นอกจากนี้ Hayabusa1 ก็ยังเจอความซวยซ้ำแล้วซ้ำเหล่าแบบไม่ซ้ำกันตั้งแต่ก่อนปล่อยยันเก็บตัวอย่างเลยทีเดียวมีดังนี้
ก่อนหน้านี้ Hayabusa1 ถูกกำหนดให้ไปเก็บตัวอย่างดาวเคราะห์น้อย 4660 Nereus (โดยมี (10302) 1989 ML เป็นเป้าหมายสำรอง) ซึ่งต้องปล่อยก่อนเดือนกรกฎาคม 2002 แต่ในช่วงเดือน กรกฎาคม 2000 จรวด Epsilon หรือ M-5 ของญี่ปุ่นที่บึมกลางอากาศหลังปล่อยได้เพียง 42 วินาที ทำให้ Payload ASTRO-E พร้อมกับซากที่เหลืออยู่ของจรวดตกทะเลไป น่าเสียดายที่ Hayabusa1 ก็จะใช้จรวดแบบเดียวกันเพื่อปล่อยเช่นกันจึงต้องเลื่อนการปล่อยออกไปเพราะการสอบสวนหาสาเหตุ ทำให้ Hayabusa1 พลาดเป้าหมายเดิม คือ 4660 Nereus และ 1989 ML ไป เพราะมันโคจรเลยไปแล้ว จึงต้องเปลี่ยนเป็น 1998 SF36 หรือ ดาวเคราะห์น้อย Itokawa แทน
Hayabusa 1 มีเป้าหมายที่จะนำโรเวอร์ที่พัฒนาโดย NASA และ JPL ชื่อ Muses-CN ไปปล่อยบนพื้นผิวของดาวเคราะห์น้อยด้วย แต่โครงการโรเวอร์ดังกล่าวก็ถูกยกเลือกไปในปี 2000 เนื่องจากถูกตัดงบ
ธันวาคม 2002 เป็นช่วงที่จริง ๆ แล้ว Hayabusa1 จะต้องถูกปล่อยไม่นับการเลื่อนครั้งที่แล้ว แต่วิศวกรก็ดันไปเจอว่า O-rings ของระบบ RCS หรือ Reaction Control System ซึ่งมีไว้ควบคุมยานใช้วัสดุไม่ตรงกับที่ระบุไว้ทำให้ต้องเลื่อนออกไปอีกเป็น พฤษภาคม 2003 ซึ่งรอบนี้ได้ปล่อยจริง ๆ ในวันที่ 9 พฤษภาคม 2003 ด้วยจรวด M-5
ปี 2003 ระหว่างที่ Hayabusa1 กำลังเดินทางไป Itokawa เกิดการลุกจ้า (Solar flare) และการปลดปล่อยมวลหรือ Coronal Mass Ejection จากดวงอาทิตย์ที่ใหญ่ครั้งหนึ่งเท่าที่เคยบันทึกมาขึ้น ทำให้เกิดความเสียหายกับแผงโซลาร์เซลล์ของ Hayabusa1 เป็นผลให้ยานมีพลังงานลดลงรวมถึงพลังงานในการขับเคลื่อนเครื่องยนต์ Ion ก็ลดลงเช่นกัน ทำให้ Hayabusa1 ถึง Itokawa ช้ากว่ากำหนดจาก กรกฎาคม 2005 ไปเป็น กันยายน 2005 แทน นอกจากนี้พลังงานที่ลดลงหมายถึงยานจะคงวงโคจรกับ Itokawa ได้ไม่นานและการลงจอดที่เดิมสามารถลองใหม่ได้ 3 ครั้งก็ถูกลดลงเป็น 2 ครั้ง เพราะพลังงานไม่พอ
ในปี 2005 ระบบจานหมุนควบคุมทิศทางหรือ Reaction wheels ทั้งแกน X และ แกน Y ของ Hayabusa1 ทำงานล้มเหลว ทำให้ยาน Hayabusa1 ต้องใช้จรวดขับดัน RCS ในการควบคุมทิศทางแทน
วันที่ 4 พฤศจิกายน 2005 การซ้อมลงจอดบน Itokawa ของ Hayabusa1 ล้มเหลว นอกจากนี้พื้นที่เก็บตัวอย่างซึ่งเดิม คือ Woomera Desert พบว่าเป็นพื้นที่หินเยอะ จึงต้องเปลี่ยนพื้นที่ลงจอด และวันที่ 12 พฤศจิกายน 2005 การปล่อย Lander MINERVA ล้มเหลว


แต่สุดท้าย Hayabusa ก็กลับมายังโลกพร้อมกับตัวอย่างของหินบนดาวเคราะห์น้อย Itokawa และทิ้ง Capsule เก็บตัวอย่างกลับมาที่โลกวันที่ 13 กรกฎาคม 2010 เวลา 13:51 UTC
การมาถึงของภารกิจ Hayabusa2 และ 162173 Ryugu
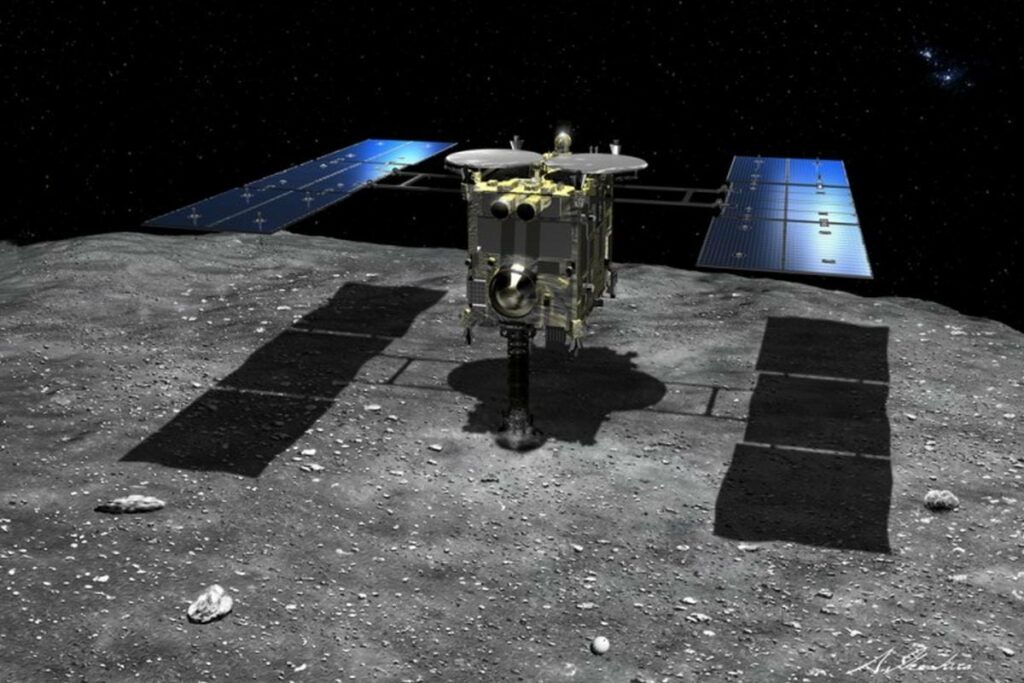
Hayabusa2 หรือ Perigene falcon 2 (はやぶさ2) เป็นภารกิจการเก็บตัวอย่างดาวเคราะห์น้อยกลับโลกเหมือนกับ Hayabusa1 ดำเนินการโดย JAXA ภารกิจหลักคือการเดินทางไปยังดาวเคราะห์น้อย 1999 JU3 ซึ่งปัจจุบันมีชื่อว่า 162173 Ryugu เพื่อไปเก็บตัวอย่าง
Ryugu เป็นวัตถุใกล้โลก (near-Earth object: NEO) และถูกจัดกลุ่มให้เป็นดาวเคราะห์น้อยที่อาจเป็นอันตรายต่อโลก ขนาดเส้นผ่านศูนย์กลางประมาณ 1 กิโลเมตร ถูกจำแนกอยู่ในกลุ่มดาวเคราะห์น้อย C-type และ B-type โดย C-type เป็นกลุ่ม Carbonaceous หรือ คาร์บอนที่มีค่า Albedo ต่ำทำให้ Ryugu มีลักษณะที่มืด ส่วน B-type เป็น Carbonaceous เช่นกันแต่มีสเปกตรัมออกไปทางสีน้ำเงินมากกว่าและยังมี Albedo ที่เยอะกว่า C-type เล็กน้อยทำให้มันสว่างกว่า ซึ่ง Ryugu มีส่วนประกอบที่อยู่กึ่งกลางระหว่างทั้งสองกลุ่มนี้จึงทำให้มันถูกจำแนกไว้ทั้งสองกลุ่ม
Ryugu ถูกค้นพบเมื่อวันที่ 10 พฤษภาคม 1999 โดย Licoln Near-Earth Asteroid Research ใน New Mexico, สหรัฐอเมริกา โดยให้ชื่อเรียกเริ่มต้นว่า 1999 JU3 ภายหลังเปลี่ยนเป็น Ryugu ตามชื่อของ Ryūgū-jō ซึ่งแปลว่า วังมังกร ซึ่งเป็นตำนานปราสาทใต้น้ำที่เรียกว่า Japanese folklore ของญี่ปุ่น ซึ่งในเรื่องมีนักตกปลาชื่อ Urashima Taro เดินทางไปบนหลังของเต่าและกลับมาพร้อมกับกล่องปริศนา จึงทำให้มันสอดคล้องกับเรื่องราวในปัจจุบันที่ Hayabusa2 ซึ่งเปรียบเป็นนักตกปลาเดินทางไปยัง Ryugu เพื่อไปเอากล่องปริศนาซึ่งก็คือกล่อง Capsule เก็บตัวอย่างกลับมายังโลกนั่นเอง
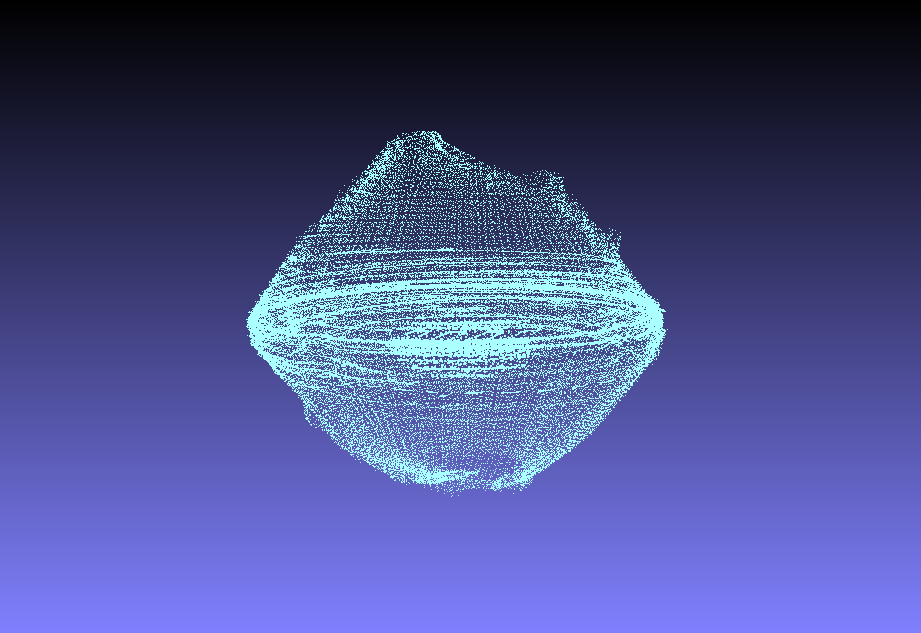
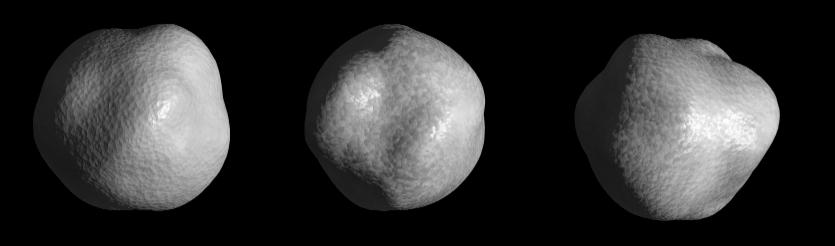
Ryugu มีรูปร่างคล้ายทรงกลมและมีสันเขาตรงกลางบริเวณเส้นศูนย์สูตรรูปร่างคล้ายกับดาวเคราะห์น้อย Bennu ที่ OSIRIS-REx ลงจอดและทำการเก็บตัวอย่างพื้นผิวของดาวเคราะห์น้อย ซึ่งคาดว่าสันเขาเหล่านี้เกิดจากแรงหนีศูนย์กลางซึ่งเกิดจากการหมุนรอบตัวเองของดาวเคราะห์น้อยด้วยที่เร็ว
นอกจากนี้ Ryugu ยังมีวงโคจรที่โคจรตัดโลกถึงสองครั้งใน 1 รอบวงโคจรทำให้มันถูกจัดกลุ่มอยู่ในกลุ่มเสี่ยงที่อาจเป็นอันตรายต่อโลกได้นั่นเอง
การพัฒนายาน Hayabusa2
Hayabusa2 ถูกเสนอในปี 2009 โดย Makoto Yoshikawa ต่อ JAXA ในชื่อโครงการว่า “Hayabusa Follow-on- Asteroid Sample Return Missions” ต่อมาในปี 2010 รัฐบาลญี่ปุ่นได้อนุมัติงบประมาณและอนุญาตให้ JAXA เริ่มพัฒนายาน Hayabusa2 ได้ โดยงบประมาณรวมถูกคาดการณ์ไว้ที่ 16.4 พันล้านเยนในปี 2010 หรือประมาณ 4.7 พันล้านบาทในปัจจุบัน
รูปร่างและการออกแบบของ Hayabusa2 ใช้ Hayabusa1 เป็นต้นแบบแต่ปรับปรุงเพิ่มเติ่ม โดย Hayabusa2 มีน้ำหนักประมาณ 610 กิโลกรัมพร้อมเชื้อเพลิง แผงโซลาร์เซลล์ 2 แผงให้กำลัง 2.6 kW ที่ระยะห่างจากดวงอาทิตย์ 1 AU (โลก) และ 1.4kW ที่ 1.4 AU โดยเก็บพลังงานในแบตเตอรี่ชนิด Lithium-ion 13.2 Amp hour (Ah)
ระบบขับเคลื่อน
ระบบขับเคลื่อนของ Hayabusa2 ใช้เครื่องยนต์ Ion จำนวน 4 ตัวเรียกว่า μ10 โดยใช้จริงเพียงแค่ 3 ตัว อีกตัวเป็นเครื่องสำรอง ซึ่งตัวเครื่องยนต์ใช้รังสี Microwave ในการเปลี่ยนแก๊ส Xenon ให้เป็น Plasma หรือ ไอออน จากนั้นใช้ไฟฟ้าจากแผงโซลาร์เซลล์ในการยิงไอออนออกจากเครื่องยนต์ซึ่งจะสร้างแรงขับเคลื่อนให้ยานตามกฏการเคลื่อนที่ของนิวตันข้อที่ 3 สร้างแรงให้ยาน Hayabusa2 กว่า 28 mN ซึ่งถือว่าเป็นแรงที่น้อยมากแต่มีประสิทธิภาพกว่าเครื่องยนต์จำพวก Hypergolic โดย Xenon 66 กิโลกรัมสามารถเร่งความเร็วของยานได้ถึง 2 km/s

นอกจากนี้ยาน Hayabusa2 ยังมี Reaction wheels ถึง 4 ตัว และระบบควบคุมทิศทาง RCS ที่ใช้เชื้อเพลิง Hydrazine และ MON-3 (Mixed Oxides of Nitrogen) กว่า 12 ตัวสำหรับการปรับทิศทางของยานกันพลาดเหมือนรอบที่แล้วในยาน Hayabusa1 ที่ Reaction wheels ดันเจ๊งหมดทุกตัวทำให้ต้องใช้ RCS แทน
ระบบสื่อสาร
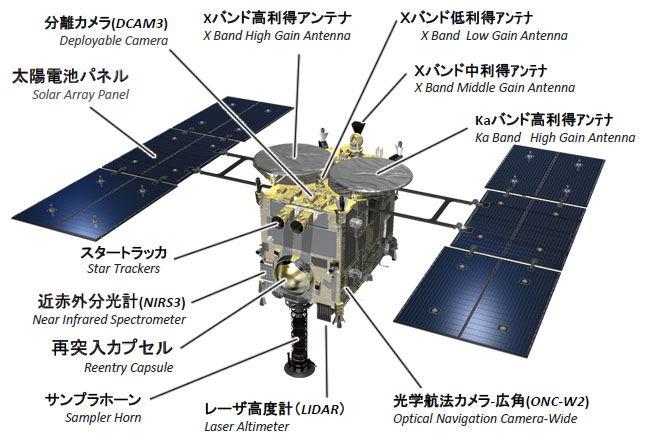
ระบบสื่อสารของยาน Hayabusa2 ใช้ช่วงคลื่นความถี่ Ka-band และกล้องช่วงคลื่นอินฟราเรดกลางในการสื่อสาร โดยบนยาน Hayabusa2 จะมีจาน High-gain แบบ Directional สำหรับรับสัญญาณและส่งสัญญาณในช่วงคลื่นความถี่ X-band และ K-band ความเร็วในการส่งข้อมูล 8 bit/s ถึง 32 kbit/s ส่งข้อมูลผ่าน Usuda Deep Space Center, Uchinoura Space Center, Malargue Station (ESA) และ Deep Space Network ของ NASA

(สามารถอ่านบทความเกี่ยวกับ Deep Space Network ได้ที่นี่ Deep Space Network คืออะไร เบื้องหลัง การสื่อสารของภารกิจสำรวจอวกาศห้วงลึก)
ระบบนำทาง
Hayabusa2 ใช้กล้อง Optical Navigation Camera Telescope (ONC-T) ซึ่งเป็นกล้อง 7 สีมุม 6 ถึง 60 องศาใช้ในการนำทางร่วมกับกล้อง Optical Navigation Camera-Wide-field (ONC-W2) และ Star trackers อีก 2 ตัวในการทำงาน
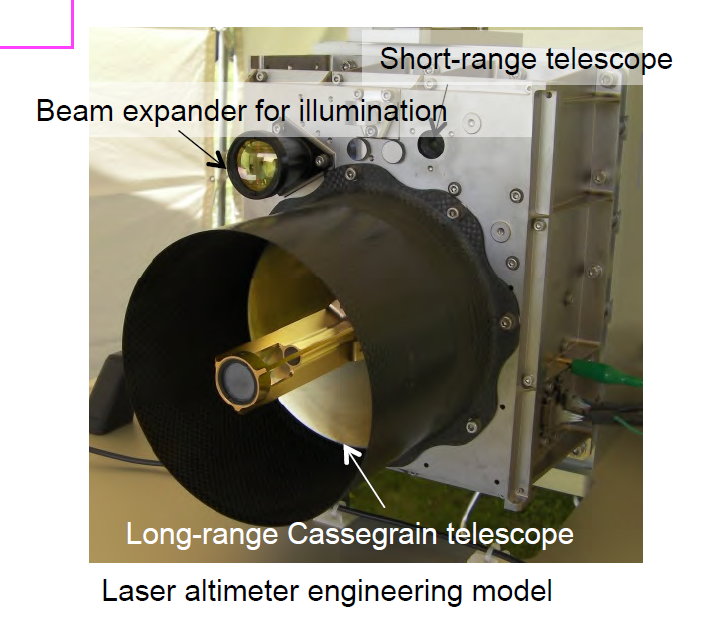
นอกจากนี้ Hayabusa2 ยังมีระบบนำทางที่ใช้ในการลงจอดอีกเช่นกันโดยการปล่อย Artificial Marker ลงบริเวณ Landing zone จากนั้นใช้ไฟกะพริบบนยานส่องลงไปที่พื้นผิว ซึ่ง Marker ที่ว่ามีคุณสมบัติในการสะท้อนสูงมากจึงทำให้ยานสามารถแยกและรู้ได้ว่าจุดลงจอดอยู่ตรงไหน Hayabusa2 ยังมีที่วัดระยะผ่านการยิง Laser เรียกว่า LIDAR ซึ่งเป็นเทคโนโลยีแบบเดียวกับที่นำมาใช้ในโทรศัพท์ของเราอย่าง iPhone หรือ iPad จะเห็นได้ว่าเทคโนโลยีที่เราใช้ในชีวิตประจำวันแต่ละอย่างล้วนแล้วแต่มาจากการใช้ในการสำรวจอวกาศมาก่อนทั้งสิ้น อวกาศจึงไม่ใช่เรื่องไกลตัวเลย (ที่แน่ ๆ คือ LIDAR บน Hayabusa2 ไม่ได้อันจิ๋ว ๆ เหมือนอยู่บนโทรศัพท์ เลื่อนกลับไปดูข้างบนได้ ฮา)
เปรียบเทียบความเปลี่ยนแปลงระหว่าง Hayabusa และ Hayabusa2
รูปด้านล่างนี้เป็นการเปรียบเทียบการเปลี่ยนแปลงระหว่างยาน Hayabusa และ Hayabusa2 ที่ JAXA ใช้ดีไซน์เดิมแต่นำข้อเสียและจุดบกพร่องของยานในภารกิจครั้งก่อนมาปรับปรุง

- ระบบการสื่อสาร: ใน Hayabusa2 ระบบการสื่อสารถูกเปลี่ยนจาก Low-Gain จานเดียวไปเป็น High-gain 2 จานแบบ Ka-band และ X-band เพื่อเพิ่มความเร็วในการส่งข้อมูล
- เครื่องยนต์ Ion: เปลี่ยนวัสดุอุปกรณ์เพื่อเพิ่มความคงทนและเพิ่มกำลังขับเคลื่อน
- Mobile Asteroid Surface Scout (MASCOT): Lander อันใหม่สำหรับเก็บข้อมูลพื้นผิว
- ระบบควบคุมทิศทาง (Attitude control): รอบที่แล้ว Reaction wheels บน Hayabusa เจ๊งสองตัวจากสาม รอบนี้เพิ่มเป็น 4 กันเจ๊ง
- Impactor: ตัวเก็บตัวอย่างแบบใหม่ที่เอาไว้สร้างหลุมบนพื้นผิวก่อนจากนั้นจึงเก็บเศษพื้นผิวขึ้นมา
- RCS Thrusters: เชื้อเพลิงแบบใหม่กันเจ๊ง
- Near-infrared spectrometer: กล้องสำหรับการสำรวจ type-C Asteroid
- Target markers: เพิ่มจาก 3 (ใน Hayabusa) เป็น 5 ใน Hayabusa2 เพื่อช่วยในการระบุตำแหน่งลงจอด

อุปกรณ์ทางวิทยาศาสตร์บนยาน Hayabusa2
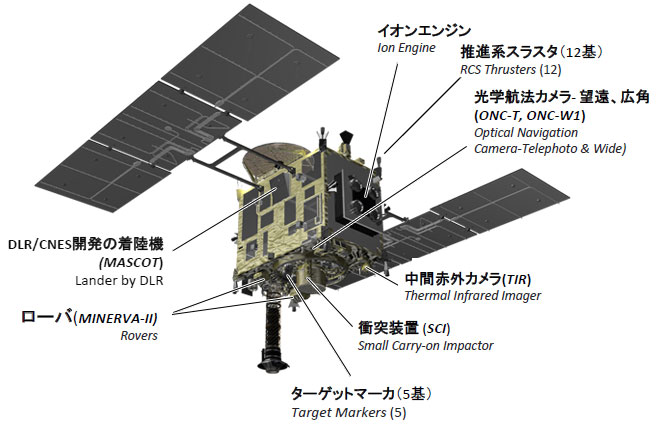
รอบนี้ Hayabusa2 ถูกยัดอุปกรณ์ทางวิทยาศาสตร์มาแบบเต็มที่ไม่ว่าจะเป็นทั้งอุปกรณ์ Remote sensing อุปกรณ์เก็บตัวอย่างหรือแม้แต่โรเวอร์และ Lander MINERVA-II ซึ่งเป็นตัวใหม่ของ MINERVA ที่ล้มเหลวไปในภารกิจ Hayabusa และ MINERVA-II รอบนี้ก็พาผองเพื่อนโรเวอร์มาเพียบเลยทีเดียว
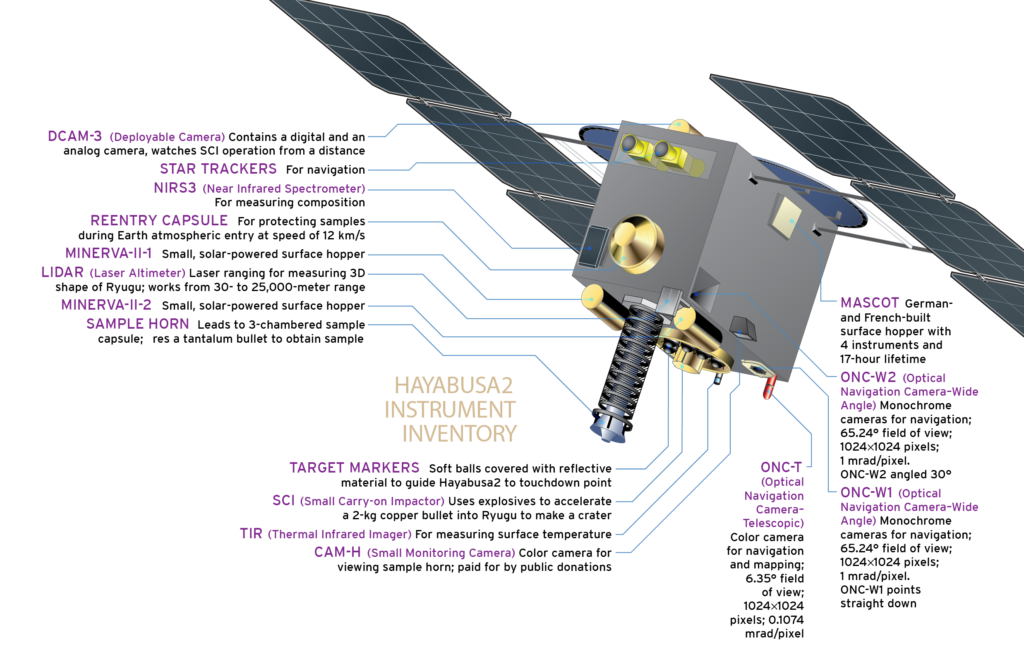
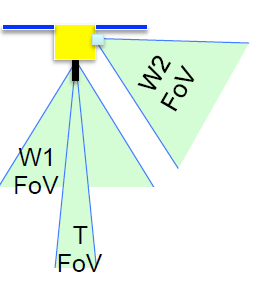
กล้อง Optical Navigation Cameras (ONCs) เป็นกล้องที่ใช้สำหรับการนำทางของยาน Hayabusa2 และยังใช้ในการสำรวจอีกด้วย เช่น การสำรวจฝุ่นอวกาศที่อาจโคจรอยู่รอบ ๆ ดาวเคราะห์น้อย โดย ONCs มีทั้งหมด 3 ตัว คือ ONC-T (Telephoto), ONC-W1 และ ONC-W2 เป็นกล้องมุมกว้าง ONC-T มี Field of view เพียง 6.35 องศา x 6.35 องศา พร้อมตัวกรองแสงต่าง ๆ ที่สามารถเปลี่ยนได้ ส่วน ONC-W1 และ ONCE-W2 เป็นกล้องมุมกว้างมี Field of view 65.24 องศา x 65.24 องศา แบบ Panchromatic (ช่วงคลื่นแสง 485-655 นาโนเมตร)
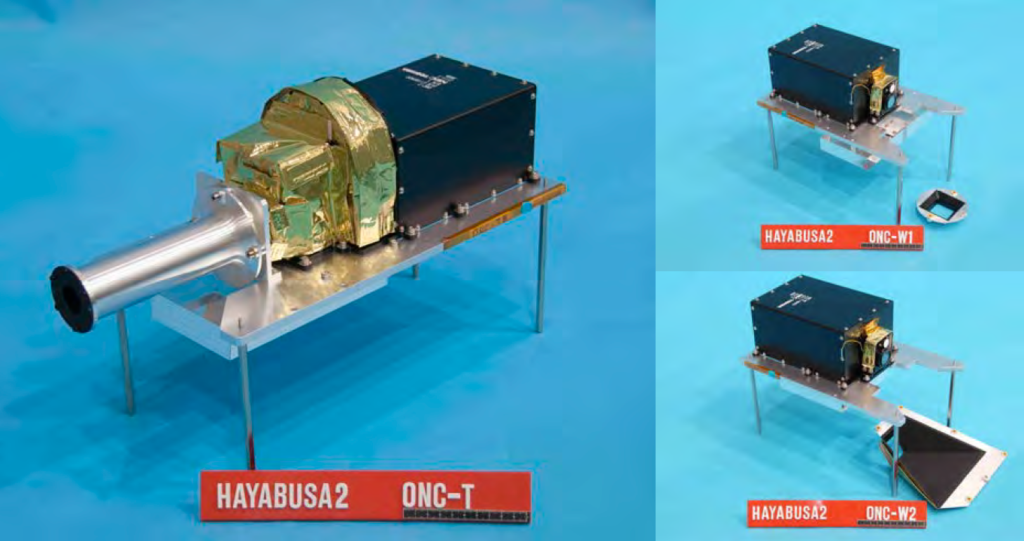
ครอบคลุมพื้นที่ต่างกัน โดย ONC-W1 และ ONC-T จะครอบคลุม FOV บริเวณ Nadir ส่วน ONC-W2 จะคลอบคลุม FOV ทางด้านซ้าย
Hayabusa2 ยังมี Thermal-Infrared Imager (TIR) ใช้สำหรับถ่ายรูปในช่วงคลื่นอินฟราเรด 8-12 μm ใช้สำหรับการวัดอุณหภูมิในช่วง -40 ถึง 150 องศาเซลเซียส ส่วน Light Detection and Ranging (LIDAR) บน Hayabusa2 ใช้สำหรับการวัดความสูงของยานจากพื้นผิวระหว่าง 30 เมตร ถึง 25 กิโลเมตร
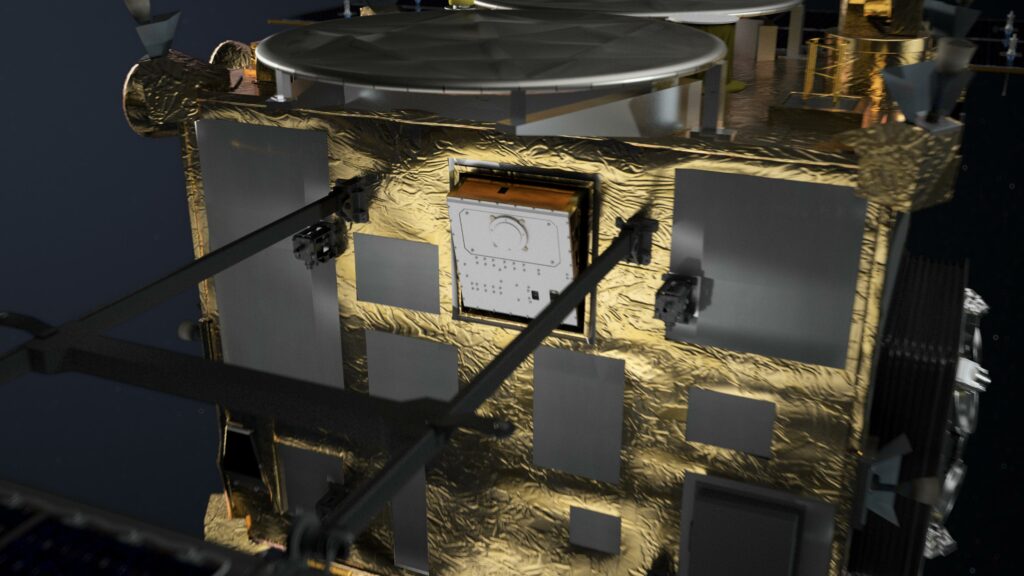
อุปกรณ์เก็บตัวอย่าง (Sampler)
Hayabusa2 มีอุปกรณ์สำหรับการเก็บตัวอย่างทั้งหมด 3 ตัว คือ Sampling device (SMP), Small Carry-on Impactor (SCI) และ Deployable Camera (DCAM3)
Sampler (SMP) คือ อุปกรณ์หลักสำหรับการเก็บตัวอย่างหินบนดาวเคราะห์น้อยกลับโลก ใช้ดีไซน์เดียวกับของยาน Hayabusa คือการใช้ Sampler horn แต่ Upgrade ด้วยการเพิ่มเติมให้ Sampler สามารถซีลแก๊สต่าง ๆ ที่อาจอยู่บนพื้นผิวของดาวเคราะห์น้อยไว้ได้ด้วย หลักการเก็บตัวอย่างคือ Sampler horn จะถูกดันลงไปในพื้นผิว ขณะเดียวกันเศษหินบนพื้นผิวที่ถูกดันก็จะกระเด็นเข้ามา Catcher นั่นเอง
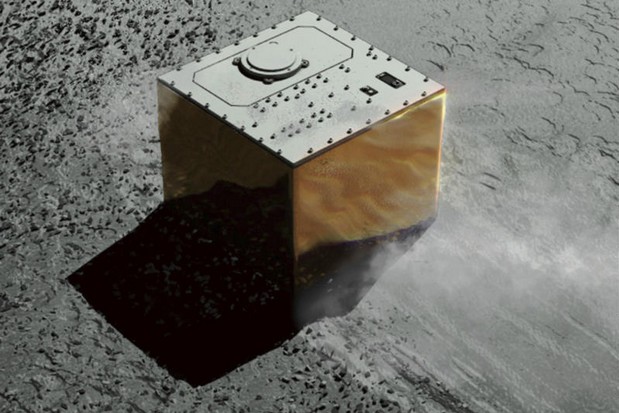
ส่วน Small Carry-on Impactor (SCI) หรือ เรียกสั้น ๆ ว่า Impactor คือ อุปกรณ์ที่เอาไว้ใช้สำหรับการระเบิดพื้นผิวเพื่อศึกษาผลกระทบจากการถูกชนโดยวัตถุที่เคลื่อนที่แบบ Projectile ซึ่งจะถูกปล่อยลงพื้นผิวหลัง Hayabusa2 เก็บตัวอย่างด้วย SMP เสร็จสิ้นและกำลังกลับเข้าสู่วงโคจร โดยจะปล่อยจากความสูงเพื่อจำลองการเคลื่อนที่แบบ Projectile
ข้างใน SCI จะเป็นวัตถุระเบิดที่จำลองหลุมอุกกาบาตคล้ายกับมีอุกกาบาตจริง ๆ มาชนเพื่อศึกษาการเกิดหลุมอุกกาบาตบนพื้นผิวของดาวเคราะห์น้อย โดย Impactor จะทำงานโดยการปล่อยที่ความสูงระดับหนึ่ง จากนั้นจุดระเบิดตัว impactor เพื่อให้ Copper plate กระเด็นเข้าชนกับ Ryugu ด้วยความเร็ว คล้ายกับการยิงอุกกาบาตขนาดเล็กด้วยความเร็วสูงเข้าใส่ Ryugu นั่นเอง ส่วนประกอบของ Impactor จะใช้เป็นทองแดงทั้งหมดเพราะสามารถแยกออกได้ง่ายว่าอันไหนคือเศษจาก Impactor อันไหนคือเศษของดาวเคราะห์น้อยหลังการระเบิด
ส่วน Deployable camera 3 (DCAM3) เป็นกล้องที่ใช้ถ่ายการระเบิดของ SCI อีกที โดย Hayabusa2 จะปลด SCI ลงบริเวณใดบริเวณหนึ่งจากนั้นอีก 1 กิโลเมตรห่างจากจุดที่ปลด SCI มันก็จะปลด DCAM3 เพื่อให้มันรอถ่ายรูปการระเบิดของ SCI ส่วน Hayabusa2 ก็… ตัวใครตัวมัน หนีดิวะ ระเบิดด เพื่อป้องกันเศษระเบิดที่อาจชนเข้ากับยานได้ ซึ่งมีสามชนิด คือ Debris ที่เป็นเศษที่เกิดจากการระเบิดโดยตรง มีความเร็วสูงมาก
Rovers สำรวจพื้นผิว
บนยาน Hayabusa2 มีโรเวอร์ทั้งหมด 4 ตัวเทียบกับ Hayabusa1 ที่มีโรเวอร์เพียงหนึ่งตัวเท่านั้นชื่อว่า MINERVA บน Hayabusa2 มีโรเวอร์ Mobile Asteroid Surface Scout (MASCOT), Rover-1A, Rover-1B ซึ่ง Rover-1A และ B ต่อมาเปลี่ยนชื่อเป็น HIBOU และ OWL ส่วนโรเวอร์ตัวสุดท้ายมีชื่อว่า Rover-2 ซึ่งโรเวอร์เหล่านี้บนยาน Hayabusa2 จะถูกเรียกรวม ๆ ว่า MINERVA-II ซึ่ง MINERVA-II เป็นกล่อง 2 กล่องที่เก็บโรเวอร์ไว้ ทั้งหมด 3 ตัว
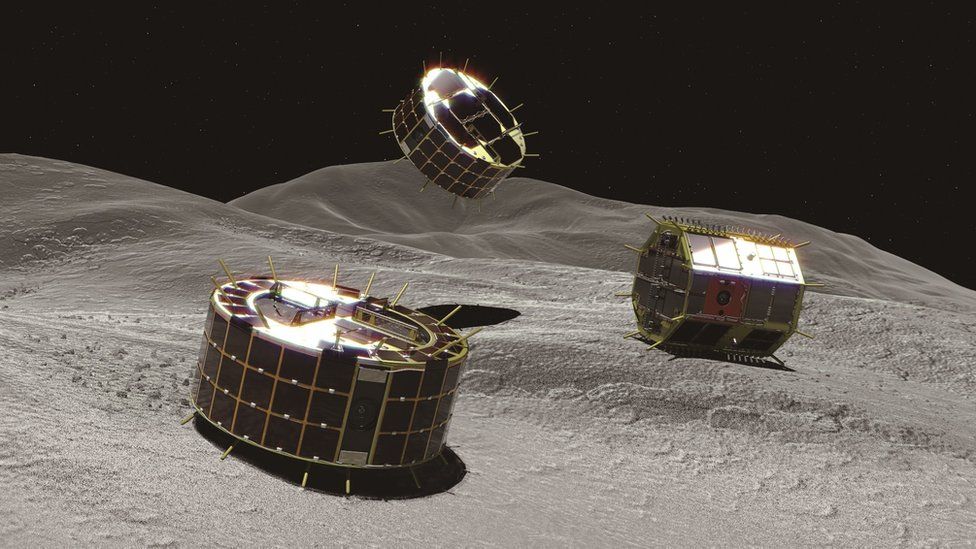
โรเวอร์ MINERVA-II
MINERVA-II-1 เป็นกล่องที่เก็บ HIBOU และ OWL พัฒนาโดย JAXA และ University of Aizu ไว้ ซึ่งเป็นโรเวอร์แบบเดียวกันทั้งสองตัว แต่ละตัวขนาดเส้นผ่านศูนย์กลาง 18 เซนติเมตร สูง 7 เซนติเมตร หนัก 1.1 กิโลกรัม อาศัยแรงโน้มถ่วงที่อ่อนของดาวเคราะห์น้อยในการเคลื่อนที่แบบกระโดดด้วยแรงบิดภายในตัวโรเวอร์ บนโรเวอร์มีอุปกรณ์ทางวิทยาศาสตร์แยกย่อยอย่าง กล้อง Stereo กล้องมุมกว่าง เทอร์โมมิเตอร์ ใช้พลังงานจากตัวเก็บประจุและแผงโซลาร์เซลล์ขนาดเล็ก

ส่วน MINERVA-II-2 เป็นกล่องแยกที่เก็บ Rover-2 ไว้ เป็นโรเวอร์ทรงปริซึมแปดเหลี่ยมพัฒนาโดย Tohoku University ขนาดเส้นผ่านศูนย์กลาง 15 เซนติเมตร สูง 16 เซนติเมตร น้ำหนักประมาณ 1 กิโลกรัม มีอุปกรณ์ทางวิทยาศาสตร์ คือ กล้องสองตัว เทอร์โมมิเตอร์ Accelerometer และ ไฟ LED ในช่วงคลื่นแสงที่มองเห็นได้และ Ultraviolet เพื่อฉายไปยังฝุ่นที่ลอยอยู่เหนือพื้นผิวเพื่อให้มันสะท้อนแสง Rover-2 อาศัยหลักการเดียวกับโรเวอร์อื่น ๆ คือ ใช้เทคนิคการกระโดด
โรเวอร์ MASCOT
Mobile Asteroid Surface Scout หรือ (MASCOT) พัฒนาและวิจัยโดย German Aerospace Center (DLR) ร่วมกับ CNES หน่วยงานด้านอวกาศของฝรั่งเศส ขนาดโรเวอร์ 29.5 เซนติเมตร x 27.5 เซนติเมตร x 19.5 เซนติเมตร น้ำหนักประมาณ 9.6 กิโลกรัม มาพร้อมกับอุปกรณ์ทางวิทยาศาสตร์อย่าง Infrared Spectrometer เรียกว่า MicrOmega, Magnetometer เรียกว่า MASMAG, Radiometer เรียกว่า MARA (MARA เป็นต้นแบบของ Infrared radiometer บนยาน InSight)และสุดท้ายคือกล้อง เรียกว่า MASCAM สำหรับการถ่ายรูปโครงสร้างบนพื้นผิวขนาดเล็ก ๆ เช่น เนื้อของตะกอนฝุ่นหิน MASCOT จะตรวจสอบโครงสร้างพื้นผิวรวมถึงส่วนประกอบแร่ธาตุของหิน การเปลี่ยนแปลงอุณหภูมิ และสนามแม่เหล็กของดาวเคราะห์น้อย
อย่างไรก็ตาม MASCOT ไม่ถือว่าเป็นโรเวอร์โดยสมบูรณ์เพราะมันเคลื่อนที่ได้เพียงครั้งเดียวเท่านั้น MASCOT ถูกออกแบบมาให้กระโดดได้หนึ่งครั้งสำหรับการเปลี่ยนพื้นผิวการสำรวจจึงทำให้มันเป็นเหมือน Lander มากกว่า นอกจากนี้มันยังไม่มีแผงโซลาร์เซลล์และใช้แบตเตอรี่แบบ Non-rechargeable ที่มีอายุประมาณ 16 ชั่วโมงเท่านั้น ทำให้ MASCOT จะทำงานได้ไม่ถึงวันหลังจากที่มันถูกเปิดขึ้นบนพื้นผิวนั่นเอง
Sample Return Capsule (SRC)
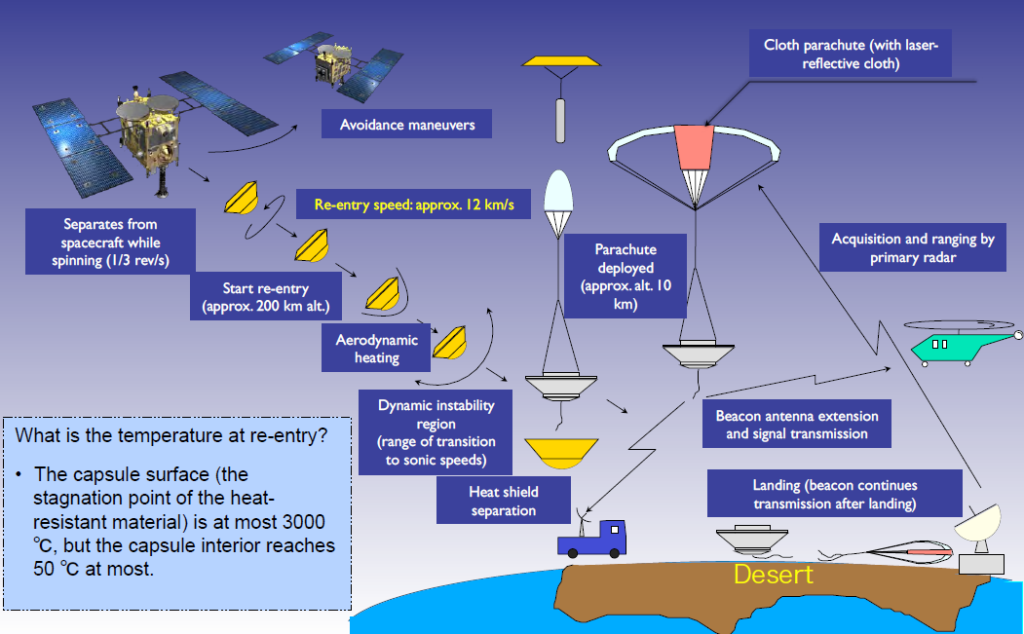
สุดท้ายสิ่งที่ขาดไม่ได้ในการนำตัวอย่างของดาวเคราะห์น้อยกลับโลกนั่นก็คือ Sample Return Capsule (SRC) นั่นเอง ซึ่ง SRC ของยาน Hayabusa2 จะถูกซีลไว้ด้วย Heat shield อีกเพื่อป้องกันสภาพอันโหดร้ายขณะ Re-entry กลับเข้าสู่ชั้นบรรยากาศโลกด้วยความเร็วกว่า 12 กิโลเมตร/วินาที ซึ่งหากไม่มี Heat shield ที่ว่า ตัวอย่างที่ได้ข้างในอาจจะกลายเป็นขี้เถ้าแทน หรือไม่แน่อาจจะสลายหายไปเลยก็ได้
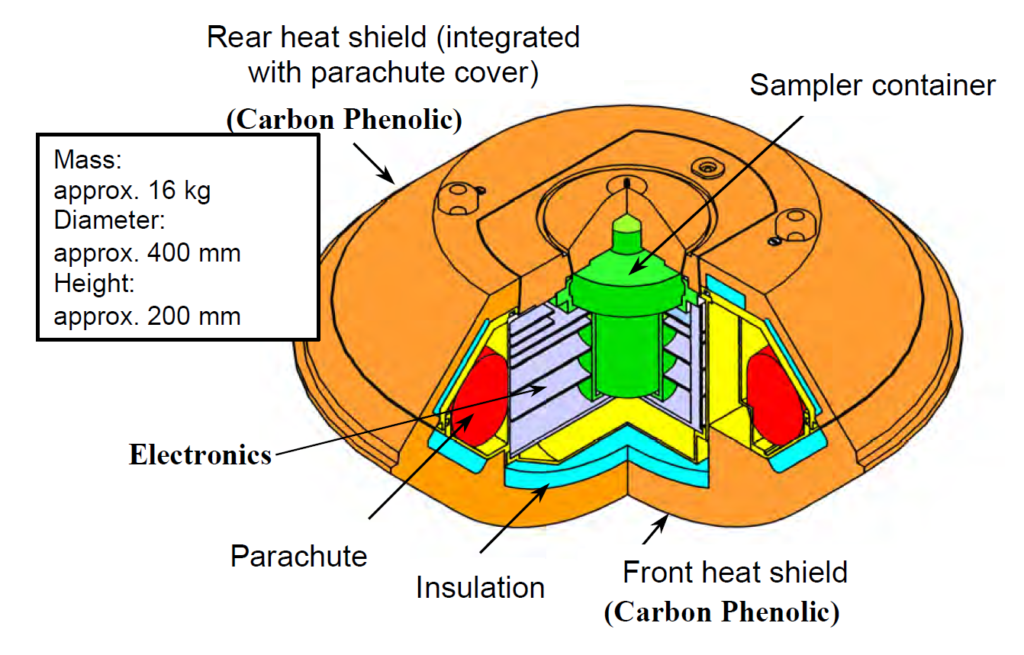
SRC อันนี้มีเส้นผ่านศูนย์กลาง 40 เซนติเมตร สูง 20 เซนติเมตร หนักประมาณ 16 กิโลกรัม ใช้ดีไซน์เดียวกับ SRC ของยาน Hayabusa1 แต่ปรับปรุงเพิ่มเติมในหลายส่วน เช่น ระบบร่มชะลอความเร็ว ระบบใหม่อย่าง Riparian Environment Management Model (REMM) สำหรับวัด Telemetry ต่าง ๆ เช่น ความเร็ว การหมุน อุณหภูมิ ขณะกลับโลก SRC มาพร้อมกับระบบ Beacon คล้าย ๆ กล่องดำของเครื่องบินที่จะมี ELT (Emergency Locator Transmitter) ส่งสัญญาณสำหรับให้ทีมเก็บกู้ใช้เรดาร์เพื่อหาแคปซูล
Timeline ภารกิจ Hayabusa2
สรุป Timeline
- 2011 – 2014: ช่วงการพัฒนายาน
- 3 ธันวาคม 2014: การปล่อยยาน
- 3-5 ธันวาคม 2014: การตรวจสอบอุปกรณ์ก่อนการ Departure
- 6 ธันวาคม 2014 – 2 มีนาคม 2015: ตรวจสอบการทำงาน
- มีนาคม 2015: Cruising Phase
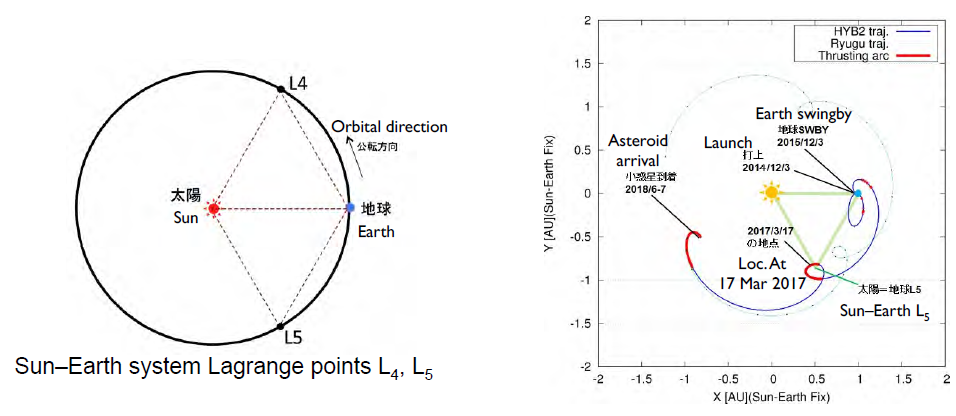
- 3 ธันวาคม 2015: Gravity Assist กับโลก (Earth swing-by)
- 4 ธันวาคม 2015 – เมษายน 2016: สำรวจซีกใต้ของโลก
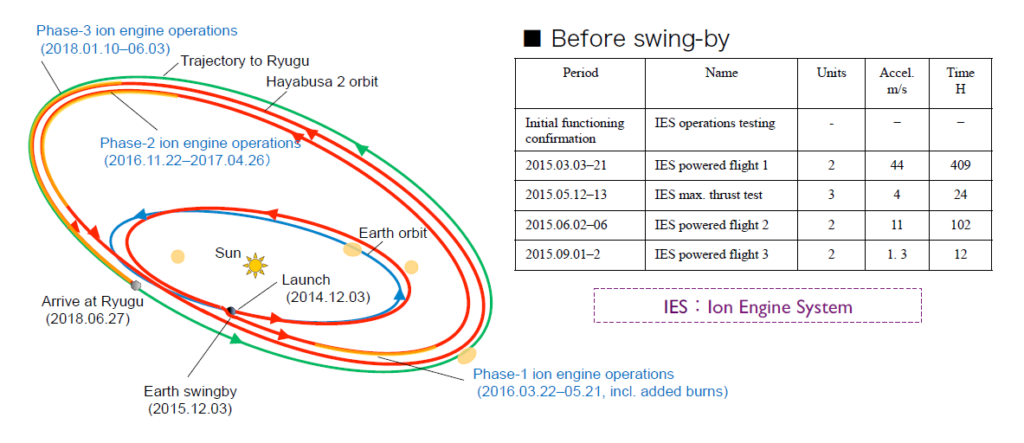
- 22 มีนาคม – 21 พฤษภาคม 2016: จุดเครื่องยนต์ Ion Phase 1
- 22 พฤศจิกายน 2016 – 26 เมษายน 2017: จุดเครื่องยนต์ Ion Phase 2
- 10 มกราคม – 3 กรกฎาคม 2018: จุดเครื่องยนต์ Ion Phase 3
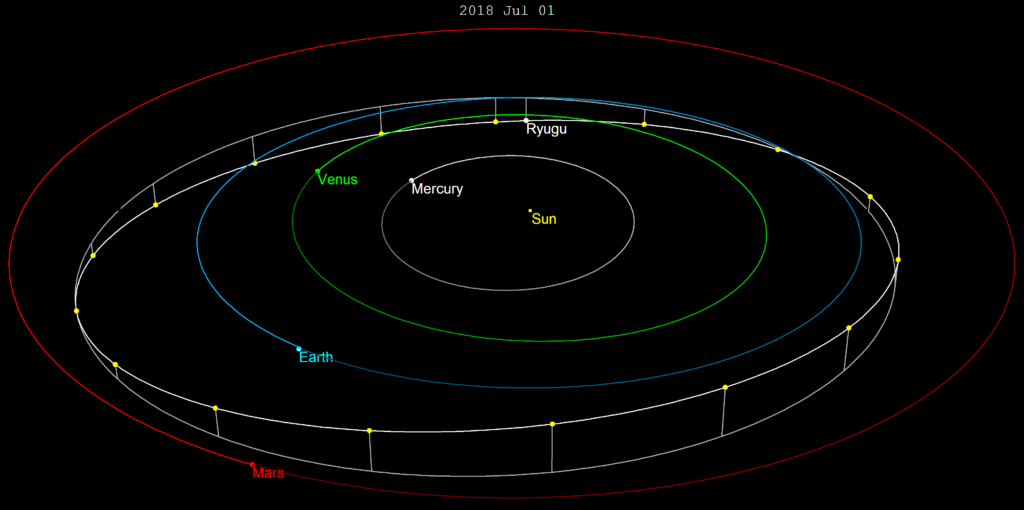
- 27 กรกฎาคม 2018: Rendezvous กับดาวเคราะห์น้อย Ryugu
สรุป Mission Operations
Hayabusa2 ถูกปล่อยขึ้นสู่อวกาศจากฐานปล่อย Tanegashima Space Center ด้วยจรวด H-IIA-26 (type 202) ในวันที่ 3 ธันวาคม 2014 เวลา 13:22:04 น. (JST) เดิมกำหนดปล่อย 30 พฤศจิกายน 2014 แต่ถูกเลื่อนเนื่องจากสภาพอากาศ
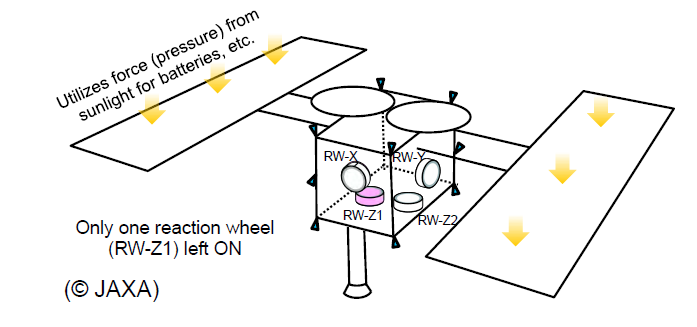
หลังการปล่อยได้ไม่นาน Hayabusa2 ก็เริ่มตรวจสอบอุปกรณ์ต่าง ๆ ว่าทำงานได้ปกติก่อนที่จะเดินทางออกจากวงโคจรของโลกและเข้าสู่โหมดที่เรียกว่า Solar Sail ในปี 2015 โดยที่ขณะอยู่ใน Solar Sail Mode ยาน Hayabusa2 จะใช้แค่ Reaction wheel ตัวเดียวในการทำงาน ไม่ต้องใช้เชื้อเพลิงด้วยการนำพลังงานแสงอาทิตย์มาแปลงเป็นไฟฟ้าเพื่อนำไฟฟ้าไปใช้กับ Reaction wheel เพียงแค่ 1 ตัวจาก 4 ตัวในการควบคุมทิศทาง (Attitude control) ของยาน
วันที่ 3 ธันวาคม 2015 Hayabusa2 เดินทางวนรอบดวงอาทิตย์กลับมาถึงโลกเพื่อทำ Earth Gravity Assist หรือ Earth swing by ซึ่งเป็นเทคนิคสำหรับช่วยให้ยานสามารถเปลี่ยนทิศทางและความเร็วอาศัยเพียงแค่แรงโน้มถ่วงของ Celestial body เท่านั้น ไม่ต้องใช้เชื้อเพลิง
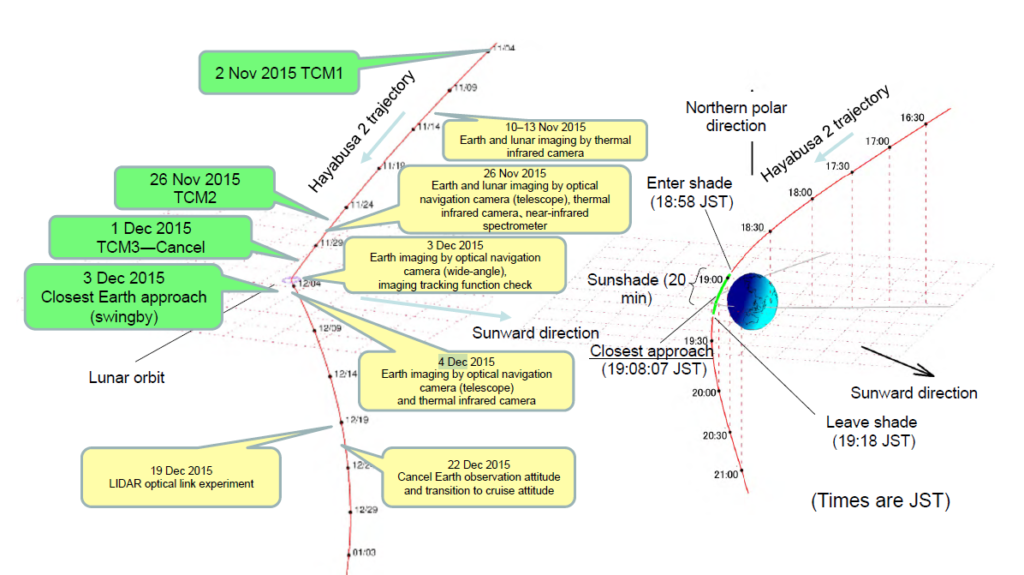
Hayabusa2 เข้าใกล้โลกมากที่สุดเหนือเกาะ Hawaiian ที่ความสูง 3,090 กิโลเมตร ซึ่งการทำ Swing-by ของ Hayabusa2 เป็นผลให้วงโคจรของมันเปลี่ยนไปอย่างมากและยังมีความเร็วเพิ่มขึ้นมากกว่าเดิมอีก 1.6 กิโลเมตร/วินาที นอกจากนี้ระหว่างการ Swing-by ก็เป็นโอกาสดีที่ Hayabusa2 จะใช้อุปกรณ์ที่มีอยู่ของมันในการสำรวจโลก ไม่ว่าจะเป็น ONC-T, TIR, NIRS3 และ LIDAR เช่นการถ่ายรูปโลกด้วยกล้อง ONC-T รวมถึงการวัดการสะท้อนแสงของพืชบนโลก ใช้ TIR ในการวัดอุณหภูมิของโลก ใช้ NIRS3 ในการตรวจสอบการดูดกลืนแสงของโมเลกุลน้ำในชั้นบรรยากาศโลกและการรับเลเซอร์จาก LIDAR ที่ระยะกว่า 6.7 ล้านกิโลเมตร

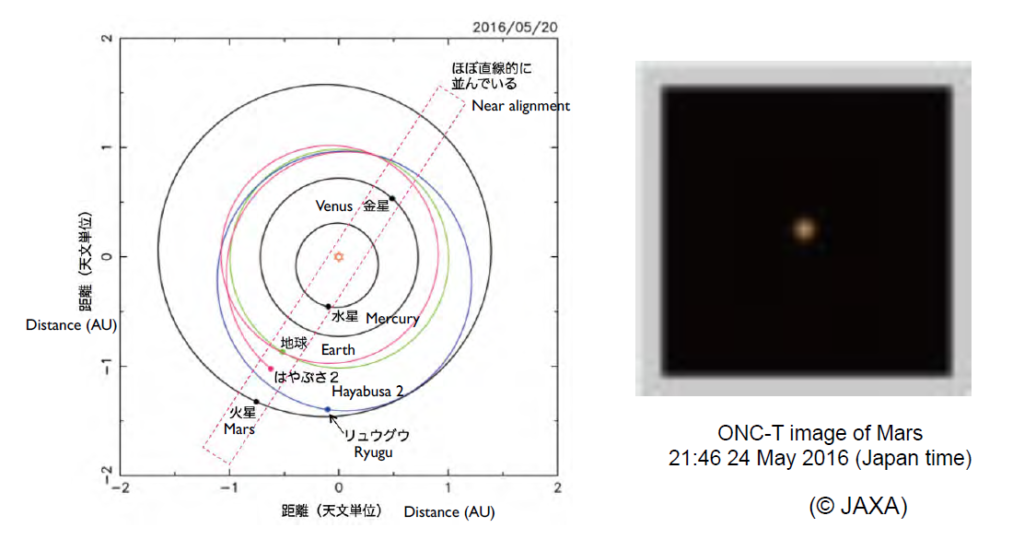
วันที่ 22 ธันวาคม 2015 Hayabusa2 หยุดการสำรวจทางวิทยาศาสตร์ของโลกและกลับเข้าสู่ภารกิจตามเดิม วันที่ 22 มีนาคม – 21 พฤษภาคม 2016 Ion Engine Phase 1 Operation ในการปรับทิศทางของยาน Hayabusa2 ให้ตรงกับจุด Rendezvous ขณะเดียวกันระหว่าง Phase 1 Operation เดือนพฤษภาคม ถึง มกราคม 2016 Hayabusa2 เคลื่อนที่เข้าสู่ Alignment (การเรียงตัว) กับดาวอังคาร โลก ดาวพุธ และดวงอาทิตย์พอดี โดยใกล้กับดาวอังคารที่สุด Hayabusa2 จึงได้ใช้อุปกรณ์ต่าง ๆ สำรวจดาวอังคาร เช่น การถ่ายรูปดาวอังคารด้วย ONC-T อีกด้วย
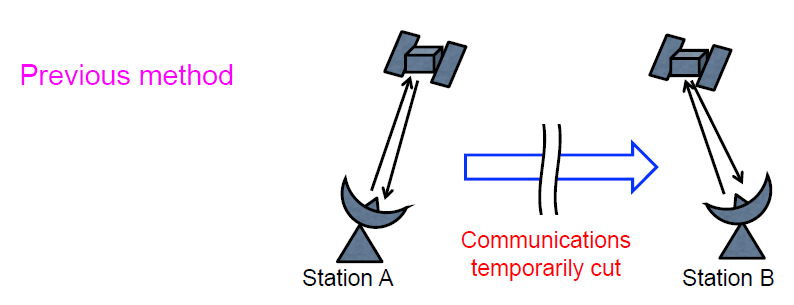
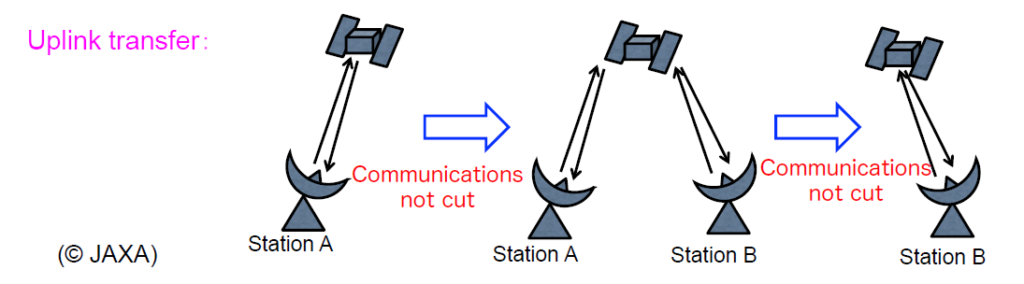
22-23 มกราคม 2016 Hayabusa2 ทำ Uplink transfer หรือการย้ายสถานีสัญญาณระหว่างเครือข่าย Deep Space Network ของ NASA ต่อมาวันที่ 2-4 พฤศจิกายน 2016 Hayabusa ทำ Uplink transfer อีกครั้ง ครั้งนี้เป็นการย้ายการส่งสัญญาณระหว่างเครือข่าย DSN ของ NASA และ สถานีรับสัญญาณ Usuda ของ JAXA ซึ่งเป็นครั้งแรกของ JAXA ที่มีการย้ายสัญญาณระหว่างกันแบบนี้และก็สำเร็จลงด้วยดี นอกจากนี้การทำ Uplink transfer ทั้ง 2 นี้ยังใช้วิธีใหม่ก็ คือ การย้ายสัญญาณแบบไม่ต้องตัดสัญญาณจากสถานีแรกออกแต่ให้สถานี 2 เชื่อมเข้ามาเลยแล้วค่อยตัดสถานี 1 ออก จากเดิมที่ต้องตัดสัญญาณสถานี 1 ก่อนจึงจะเชื่อมกับสถานี 2 ซึ่งวิธีเก่ามีโอกาสที่ตัดสัญญาณมันแล้วมันจะไปแล้วไปลับเลยไม่กลับมาอีก
ระหว่างเดือนมกราคม ถึง กรกฎาคม 2016 Hayabusa2 ยังทดสอบเทคโนโลยี DDOR หรือ Delta Differential One-way Ranging ซึ่ง DDOR คือ เทคนิคในการคำนวณวิถีโคจรของยานใด ๆ ด้วยวิธีการเดียวกับกล้องโทรทรรศน์วิทยุ VLBI (Very-long-baseline interferometry) หรือ Interfereometry นั่นเอง (สามารถอ่านบทความเกี่ยวกับ VLBI ได้ที่นี่ รู้จัก Telescope Array เครือข่ายกล้องโทรทรรศน์ทั่วโลก เบื้องหลังการค้นพบทางดาราศาสตร์)
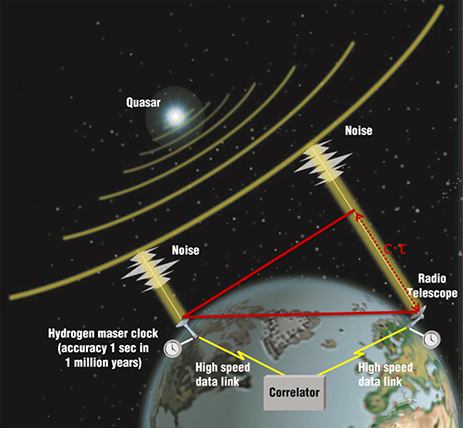
หลักการของ VLBI ก็คือการรับสัญญาณจาก Quasar ด้วยจานรับสัญญาณที่อยู่คนละที่กัน ซึ่งสัญญาณที่รับได้จาก Quasar ของทั้งสองจานจะแตกต่างกัน เพราะว่าระยะห่างมันไม่เท่ากัน ซึ่งข้อมูลความแตกต่างของเวลารับสัญญาณระดับมิลลิวินาทีนี่สามารถเอามารวมกันเปรียบเสมือน Quasar อันนั้นถูกสังเกตการณ์ด้วยกล้องที่ใหญ่เท่ากับระยะห่างของทั้งสอง Array
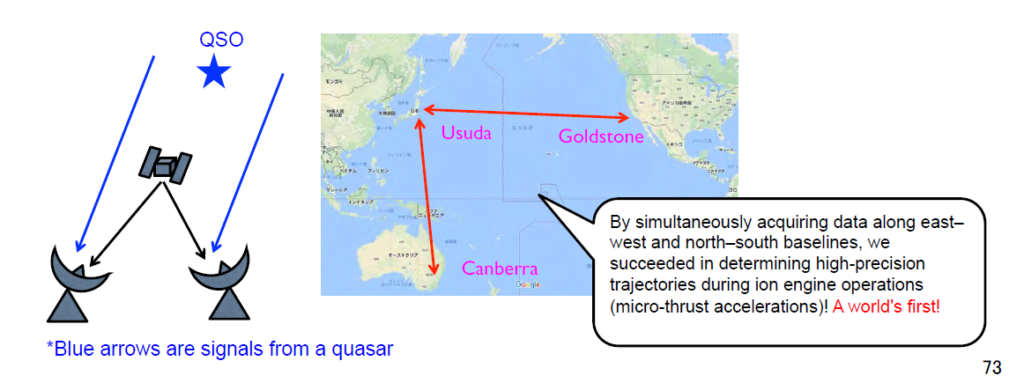
DDOR นำหลักการนี้มาใช้ด้วยการทำแบบเดียวกับ VLBI คือ ให้สถานีที่รับผิดชอบ Hayabusa2 ซึ่งมีทั้งหมด 3 สถานี คือ Canberra (CDSCC), Goldstone (GDSCC) ของ DSN และ Usuda ของ JAXA แต่ขณะเดียวกันก็รับสัญญาณจาก Hayabusa2 มาด้วย จากนั้นนำข้อมูลเวลาที่รับได้ซึ่งแตกต่างกันมาวิเคราะห์ ซึ่งนี่จะทำให้นักวิทยาศาสตร์สามารถคำนวณวิถีโคจรของ Hayabusa2 ซึ่งมีความเร่งที่เพิ่มขึ้นเล็กน้อยมากจาก Ion Engine ได้อย่างแม่นยำ
วันที่ 29 มีนาคม – 3 กรกฎาคม 2016 สถานี DSN GDSCC (Goldstone) เชื่อมต่อและสื่อสารกับ Hayabusa2 ผ่านช่องสัญญาณ Ka-band ในสำเร็จที่ระยะกว่า 50 ล้านกิโลเมตร (ปกติการสำรวจห่วงอวกาศลึกจะใช้ช่องสัญญาณ X-band ที่ความถี่น้อยกว่า (8 Ghz) ช้ากว่าแต่สื่อสารได้ไกลกว่า ส่วน Ka-band (32 GHz) เร็วกว่าแต่ระยะการสื่อสารน้อยกว่า) วันที่ 1-2 กรกฎาคม 2016 Hayabusa2 ทำ Ka-band DDOR ระหว่างสถานี DSN GDSCC (Goldstone) สถานี Malargue ของ ESA เป็นครั้งแรกที่มีการทำ DDOR ระหว่าง 3 หน่วยงาน คือ JAXA, NASA และ ESA
วันที่ 22 พฤศจิกายน 2016 – 26 เมษายน 2017 Ion Engine Phase 2 Operation เพื่อปรับทิศทางต่อ โดยระหว่างทาง วันที่ 18 เมษายน 2017 Hayabusa2 ทำการถ่ายรูปที่บริเวณจุด Langragian Point L5 ด้วยกล้อง ONC-T รูปละกว่า 30 นาที (โดยรูปที่รับแสงนานสุด คือ 178 วินาที) เพื่อหา Earth trojans (สามารถอ่านบทความเกี่ยวกับ Earth trojans และ Langragian Point ได้ที่นี่ Lagrangian Point คืออะไร ทำไมยานอวกาศถึงต้องไปอยู่ตรงนั้น) อย่างไรก็ตาม Hayabusa2 ไม่พบวัตถุใด ๆ ใน L5
วันที่ 16-17 พฤษภาคม 2017 Hayabusa2 บินผ่านดาวพฤหัสและได้ถ่ายรูปดาวพฤหัสที่ระยะห่าง 4.48565 AU ซึ่งการถ่ายรูปไม่ใช่การถ่ายเล่น ๆ แต่ถือเป็นการ Calibrate กล้อง Spectroscopic ไปในตัวเพราะดาวพฤหัสเป็นดาวเคราะห์ที่สว่างมากทำให้การ Calibrate ง่ายขึ้นมากนั่นเอง

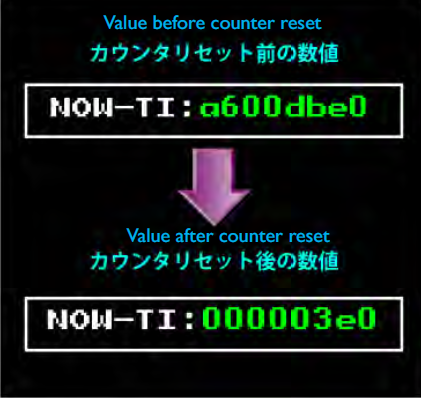
วันที่ 5 กันยายน 2017 วิศวกรของยาน Hayabusa2 ทำการรีเซตเวลาบนยานใหม่เพื่อป้องกันการเกิด Integer overflow จองระบบนับเวลาของยานซึ่งเป็นระบบ 32 bits ที่สามารถนับเวลาได้ประมาณ 4,294,967,296 เลข ซึ่งจะนับได้ประมาณ 4 ปี 3 เดือน เนื่องจากการนับเวลาบนยานใช้แบบ Count โดย 1 Count เท่ากับ 31 ms (1 ms = 1/1000 วินาที) ซึ่งต้องรีเซตก่อนที่ค่าจะ Overflow ไม่งั้นอาจเจ๊งได้ เคยมีกรณีที่ Floating point overflow คือ ค่าที่แปลงจาก 64-bit floating point ไปเป็น 16-bit signed integer เกิดการ overflow กลับไปเป็นเลข 0 ใหม่ทำให้จรวดพลิกกลับด้าน นั่นก็คือ Ariane 5 Flight 501 ที่เป็นการเอาโปรแกรมจาก Ariane 4 มาใช้แทน (แต่มันไม่ Compatible กันเพราะว่า Efficiency ไม่เท่ากัน เลยบึม)
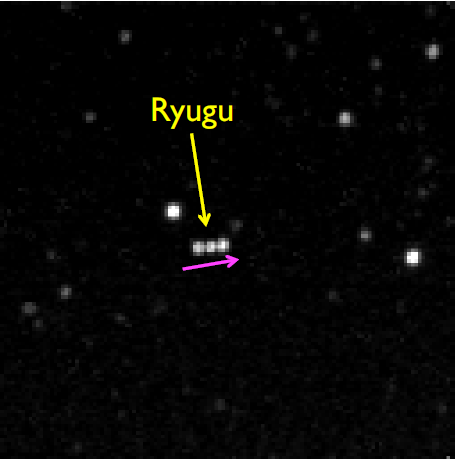
วันที่ 10 มกราคม – 3 กรกฎาคม 2018 Hayabusa2 เปลี่ยนเป็น Phase 3 Operation เพื่อปรับทิศทางเตรียม Rendezvous กับ Ryugu ในวันที่ 26 กุมภาพันธ์ 2018 Hayabusa2 สามารถถ่ายภาพของดาวเคราะห์น้อย Ryugu ที่ระยะ 1.3 ล้านกิโลเมตรด้วยกล้อง ONC-T ได้สำเร็จ
วันที่ 27 กรกฎาคม 2018 Hayabusa-2 Intercept กับ Ryugu และเข้าสู่วงโคจร Home Orbit ของดาวเคราะห์น้อย Ryugu ได้สำเร็จ การเก็บตัวอย่างของยาน Hayabusa2 มีเป้าหมาย 3 เป้าหมาย คือ
- เก็บตัวอย่างพื้นผิวที่เป็นแร่จำพวก Hydrous หรือมีลักษณะบ่งบอกว่าเป็น Hydrous
- เก็บตัวอย่างพื้นผิวที่มีร่องรอยว่าอาจถูกทำให้เปลี่ยนแปลงรูปร่างสัณฐานโดยของเหลว (เคยมีของเหลวอยู่นั่นแหละ)
- ตัวอย่างใต้ผิวดิน
Surface Sampling
การเก็บตัวอย่างแรกของ Hayabusa2 ถูกกำหนดไว้ช่วงเดือน ตุลาคม 2018 แต่ระหว่างการสำรวจพื้นที่ลงจอด Hayabusa2 พบว่าพื้นที่ลงจอดเป็นพื้นที่ที่มีโขดหินเยอะเกินไปและมีพื้นที่ที่เหมาะแก่การเก็บตัวอย่างน้อยกว่าที่คาดไว้จึงต้องเลื่อนการเก็บตัวอย่างไปเป็นปี 2018 การเก็บตัวอย่างแรกของ Hayabusa2 เกิดขึ้นในวันที่ 21-22 กุมภาพันธ์ 2019 Hayabusa2 ลงจอดบนดาวเคราะห์น้อยแบบ TAG จากนั้นยิงกระสุน Tantalum ด้วยความเร็ว 300 เมตร/วินาที เข้าที่พื้นผิวเพื่อให้เศษหินและดินกระจายขึ้นมาติดกับ Catcher โดย Hayabusa2 สามารถเก็บตัวอย่างของดินส่วนบนของ Ryugu ได้เยอะพอสมควร จริง ๆ แรกยังมีการเก็บตัวอย่างแบบ Surface Sampling ที่ต้องเก็บอีกครั้งอยู่แต่วิศวกรเลือกที่จะยกเลิกการเก็บตัวอย่างแบบลงจอดครั้งที่สองเพื่อลดความเสี่ยง และเปลี่ยนไปเก็บตัวอย่างแบบ Sub-surface แทน
Sub-surface Sampling
ในวันที่ 5 เมษายน 2019 40 นาทีหลังการปลด SCI Impactor ออกและ Hayabusa2 ไปหลบหลังดาวเคราะห์น้อยเรียบร้อยแล้ว ยาน Hayabusa2 ก็ส่งคำสั่งจุดวัตถุระเบิดพลาสติก HMX (High-Molecular-weight RDX) น้ำหนัก 4.5 กิโลกรัมเพื่อยิง Copper Projectile น้ำหนัก 2.5 กิโลกรัม เข้าใส่ Ryugu จากความสูงประมาณ 500 เมตรเข้าใส่ Ryugu จากความสูงประมาณ 500 เมตร ทำให้เกิดหลุมอุกกาบาตเทียมเส้นผ่านศูนย์กลาง 10 เมตร ซึ่งทำให้ Hayabusa2 สามารถเห็นโครงสร้างภายในของ Ryugu ได้นั่นเอง
หลังการระเบิดพื้นผิวด้วย SCI Impactor เสร็จสิ้น ในวันที่ 5 มิถุนายน 2019 Hayabusa2 ได้ไปปล่อย target marker สำหรับการช่วยนำทางและลดระดับของ Hayabusa2 บริเวณหลุมอุกกาบาตเทียมที่สร้างขึ้นด้วย SCI Impactor โดยการลดระดับอาศัยเทคนิคการสะท้อนแสงของ Target maker ในวันที่ 11 กรกฎาคม 2019 Hayabusa2 ทำ Sub-surface sampling แบบ TAG บริเวณหลุมอุกกาบาตเทียมได้สำเร็จ ตัวอย่างทั้งหมดถูกเก็บเข้าสู่ Sample Return Capsule (SRC) เตรียมเดินทางกลับโลก
Rovers Deployment
แน่นอนว่า Hayabusa2 ไม่ได้มาตัวเปล่าแต่พกโรเวอร์มาด้วยถึง 3 ตัว บวก Lander อีก 1 โดย Rover ชุด MINERVA-II-1 ประกอบด้วย Rover-1A (HIBOU) และ Rover-1B (OWL) ถูกปล่อยลงบนพื้นผิวในวันที่ 21 กันยายน 2018 โดย HIBOU สามารถทำงานบนพื้นผิวได้กว่า 36 วัน ในขณะที่ OWL อายุสั้นไปนิดทำงานได้ 3 วัน HIBOU ส่งรูปภาพของดาวเคราะห์น้อยกลับมากว่า 609 รูป ส่วน OWL ส่งกลับมาได้ถึง 39 รูปถึงแม้จะอยู่ได้แค่ 3 วันเท่านั้น

ส่วน Rover-2 ในชุด MINERVA-II-2 ทำงานล้มเหลวบางส่วนก่อนปล่อยลงพื้นผิวดาวเคราะห์น้อย นักวิศวกรจึงตัดสินใจว่าอย่างน้อยก็ให้มันทำงานสักนิดก็ยังดี จึงปลดมันออกสู่อวกาศเมื่อวันที่ 2 ตุลาคม 2019 เพื่อให้มันโคจรรอบดาวเคราะห์น้อยและวัดค่าสนามแรงโน้มถ่วงของ Ryugu ก่อนที่มันจะตกกระแทกพื้นผิวของ Ryugu ในอีกไม่กี่วันต่อมา
ส่วน MASCOT ซึ่งเป็น Lander ที่มา Quota โดดได้รอบนึงลงจอดบนดาวเคราะห์น้อย Ryugu วันที่ 3 ตุลาคม 2018 โดยมันสามารถทำงานได้เกินกว่าที่คาดการณ์ไว้ 1 ชั่วโมง (17 ชั่วโมงโดยรวม)
Return of Hayabusa2
Hayabusa2 เดินทางออกจาก Safe Home Orbit ของ Ryugu ในเดือนพฤศจิกายน 2019 ด้วยการจุดเครื่องยนต์ Ion เพื่อเปลี่ยนวิถีโคจรกลับโลกและเดินทางถึงโลกในเดือน ธันวาคม 2020 วันที่ 5 ธันวาคม 2020 เวลา 05:30 UTC เพียงไม่กี่ชั่วโมงก่อนที่ Hayabusa2 จะบินผ่านโลก Sample Return Capsule (SRC) เริ่มหมุนตัวเองที่ 1/3 rev/วินาที เพื่อทำ Spin Stabilization จากนั้น Hayabusa2 จึงปลด Capsule เก็บตัวอย่างออกจากยาน SRC เข้าสู่ชั้นบรรยากาศของโลกที่ความเร็ว 12 กิโลเมตรต่อชั่วโมง ตัวอย่างของหินข้างในถูกปกป้องจากความร้อนมหาศาลจากภายนอกกว่า 3,000 องศาเซลเซียสด้วย Heat Shield ทำให้ภายในร้อนสุดก็แค่ 50 องศาเซลเซียสเท่านั้น SRC ปลด Heat Shield ออก และกางร่มชะลอความเร็วที่ความสูงประมาณ 10 กิโลเมตรเหนือพื้นผิว
Sample Return Capsule ตกถึงพื้นโลกในบริเวณ Woomera Test Range, Australia ข้างในมีตัวอย่างที่เก็บได้จาก Ryugu ซึ่งจะถูกส่งต่อไปให้ JAXA Extraterrestrial Sample Curation Center

จะเกิดอะไรขึ้นต่อหลังจากนี้
NASA ได้ทำข้อตกลงระหว่าง JAXA ว่าจะขอแบ่งตัวอย่างของดาวเคราะห์น้อย Ryugu จาก Hayabusa2 แลกกับที่ JAXA จะได้ส่วนแบ่งของตัวอย่างดาวเคราะห์น้อย Bennu จากยาน OSIRIS-REx ที่จะเดินทางถึงโลกในปี 2023
นอกจากนี้ NASA ยังลงทุนสร้างห้องปฏิบัติการใหม่สำหรับการตรวจวิเคราะห์ตัวอย่างของ Hayabusa2 โดยเฉพาะเลยด้วย โดย Keiko Nakamura-Messenger นักวิจัยและนักวิทยาศาสตร์ของ Astromaterials Research and Exploration Science Division (ARES) ของ NASA จะเป็นผู้ดูแลการวิเคราะห์ตัวอย่างในแล็บใหม่ที่ NASA กำลังสร้างขึ้นใน Johnson Space Center
นอกจากนี้ Hayabusa2 ก็ยังมีชีวิตอยู่และยังเหลืออายุขัยอีกพอสมควรพร้อมกับเชื้อเพลิงแก๊ส Xenon สำหรับเครื่องยนต์ Ion ที่เหลือกว่า 30 กิโลกรัม (จาก 66 กิโลกรัม) ซึ่งเหลือเกือบครึ่ง จึงทำให้การเดินทางของ Hayabusa2 ยังไม่หยุดเพียงเท่านั้นแต่ Hayabusa2 จะเดินทางต่อเพื่อทำ Fly-by กับ L-type asteroid (98943) 2001 CC21 ในเดือน กรกฎาคม 2026 ซึ่ง L-type asteroid เป็นดาวเคราะห์น้อยที่หายากในระบบสุริยะ มีสเปกตรัมอยู่ค่อนทางสีแดง ซึ่งมีดาวเคราะห์น้อยเพียง 41 ดวงในฐานข้อมูลเท่านั้นที่ถูกจำแนกให้เป็น L-type ในเดือน ธันวาคม 2027 Hayabusa2 จะวนกลับมาโลกเพื่อทำ Gravity Assist (Earth Swing-by) อีกครั้ง จากนั้นก็จะกลับมาทำ Gravity Assist ครั้งที่สองในเดือน มิถุนายน 2028 เพื่อเหวี่ยงตัวเองไปยัง 1998 KY26 ซึ่งจะเดินทางถึงในช่วงเดือน กรกฎาคม 2031 1998 KY26 เป็นวัตถุใกล้โลกขนาดเส้นผ่านศูนย์กลางเพียงแค่ 30 เมตร มีอัตราการหมุนรอบตัวเองที่เร็วมากโดยหมุนครบรอบทุก ๆ 10.7 นาที อยู่ห่างจากโลกประมาณ 2 ของระยะห่างจากโลกไปดวงจันทร์และมันเป็นเป้าหมายหลักของการต่ออายุภารกิจในครั้งนี้
Hayabusa2 จะช่วยเราไขปริศนาเกี่ยวกับดาวเคราะห์น้อยมากมายและอาจจะเป็นส่วนหนึ่งที่ช่วยให้เราเข้าใจการเกิดของสารอินทรีย์และน้ำบนดาวเคราะห์น้อยรวมถึงอาจช่วยให้เรารู้ว่าเราเกิดขึ้นมาได้ยังไง โลกเกิดขึ้นมันได้ยังไง และปริศนาอีกมากมายเกี่ยวกับการเกิดของระบบสุริยะของเรา
ปิดท้ายด้วยภาพสวย ๆ ของ Hayabusa2 Sample Return Capsule Re-entry เมื่อวันที่ 5 ธันวาคม 2020 ถ่ายจาก Coober Pedy, Australia


เรียบเรียงโดย ทีมงาน SPACETH.CO
อ้างอิง
NASA to Receive Hayabusa2 Asteroid Sample from Japanese Colleagues
Hayabusa2 Fact Sheet – JAXA