ในที่สุด หลังจากการรอคอยที่ยาวนานกว่าครึ่งทศวรรษ วันที่ 27 ตุลาคม 2025 ก็ได้กลายเป็นอีกหนึ่งวันสำคัญของวงการอวกาศญี่ปุ่น เมื่อองค์การอวกาศญี่ปุ่น JAXA ส่งยาน HTV-X1 ขึ้นสู่วงโคจรสำเร็จจาก Tanegashima Space Center โดยใช้จรวด H3 นับเป็นเที่ยวบินที่ 7 ซึ่งถือเป็นการเปิดศักราชใหม่ของยานขนส่งเสบียงสู่สถานีอวกาศนานาชาติ ภายใต้ชื่อที่ย่อมาจาก H-II Transfer Vehicle-X หรือ “HTV-X” ยานลำนี้ถูกออกแบบขึ้นมาเพื่อสืบทอดภารกิจของ “Kounotori” รุ่นเดิม ที่ญี่ปุ่นใช้มานับตั้งแต่ปี 2009 แต่คราวนี้มาพร้อมโครงสร้างที่ล้ำสมัยกว่าเดิม ระบบนำทางอัตโนมัติที่ฉลาดขึ้น และอายุการทำงานที่ยาวนานขึ้นเกือบเท่าตัว สำหรับรายละเอียดฉบับเต็มของยาน HTV-X สามารถอ่านได้จากบทความ เจาะลึกทุกรายละเอียด HTV-X ยานส่งเสบียงสู่สถานีอวกาศแห่งอนาคตของญี่ปุ่น


HTV-X แตกต่างจากรุ่นก่อนในแทบทุกด้าน ทั้งในเชิงวิศวกรรมและแนวคิดการออกแบบ ตัวลำยานแบ่งเป็นสองส่วนหลักคือ Pressurized Logistics Module และ Unpressurized Module ซึ่งสามารถขนส่งชิ้นส่วนภายนอกสถานีได้โดยตรง ระบบพลังงานและการสื่อสารถูกออกแบบใหม่ให้สามารถควบคุมได้จากศูนย์ภาคพื้นโดยไม่ต้องพึ่งพาการสั่งการจากนักบินอวกาศมากนัก ขณะที่ระบบนำทางใช้การคำนวณด้วย Machine Learning แบบเรียลไทม์ ร่วมกับสัญญาณ GPS และการสะท้อนแสงจากรีเฟลกเตอร์ เพื่อให้ยานสามารถเข้าใกล้สถานีได้อย่างแม่นยำ นอกจากนี้ยังมีภารกิจทดสอบเทคโนโลยีติดไปด้วย เช่น H-SSOD สำหรับการปล่อย CubeSat และ Mt.FUJI ซึ่งเป็นอุปกรณ์สะท้อนแสงเลเซอร์เพื่อการวัดระยะจากโลกอย่างละเอียด

หนึ่งในความสามารถที่โดดเด่นของ HTV-X คือการรองรับการบรรทุกสัมภาระล่าช้าหรือ Late Access Cargo ได้จนถึง 24 ชั่วโมงก่อนปล่อย ซึ่งเป็นสิ่งที่ยานรุ่นก่อนอย่าง HTV ทำไม่ได้ ระบบนี้ออกแบบมาเพื่อรองรับของที่ต้องเก็บในอุณหภูมิควบคุม เช่น อาหารสด เซลล์ชีวภาพ หรือตัวอย่างทางวิทยาศาสตร์ที่เสื่อมสภาพได้รวดเร็ว ภายในโครงสร้างของ HTV-X ถูกปรับใหม่ให้มี “ช่องทางเข้าด้านบน” ที่สามารถเปิดได้แม้ยานถูกติดตั้งอยู่บนจรวดแล้ว โดยมีการเชื่อมต่อระบบไฟและควบคุมอุณหภูมิโดยตรงจากภายนอกจรวด ทำให้เจ้าหน้าที่สามารถนำของเข้าไปบรรจุได้ในช่วงเวลาสุดท้ายก่อนปล่อย ช่วยลดความเสี่ยงของการเสื่อมสภาพของตัวอย่าง และเพิ่มความยืดหยุ่นในการวางแผนภารกิจได้อย่างมาก—เป็นการยกระดับมาตรฐานการขนส่งของญี่ปุ่นให้ทัดเทียมกับยานขนส่งรุ่นใหม่ระดับโลกอย่าง Cargo Dragon ของ SpaceX หรือ Dream Chaser ของ Sierra Space.

การปล่อยเริ่มต้นขึ้นในช่วงเช้าเวลา 09:00 น. ตามเวลาญี่ปุ่น หลังจากที่ภารกิจเลื่อนมาจากวันที่ 21 ตุลาคมเนื่องจากสภาพอากาศไม่เอื้ออำนวย จรวด H3 ค่อย ๆ ทะยานขึ้นจากฐานยิง Yoshinobu Launch Complex 1 ท่ามกลางเสียงปรบมือของทีมควบคุมภารกิจ ยาน HTV-X1 แยกตัวออกจากจรวดได้อย่างสมบูรณ์ในเวลาเพียง 15 นาทีหลังปล่อย และกางแผง Solar Arrays สำเร็จ ข้อมูล Telemetry จากวงโคจรถูกส่งกลับมาที่ศูนย์ควบคุมของ JAXA ในเมือง Tsukuba ยืนยันว่าระบบทั้งหมดทำงานตามปกติ

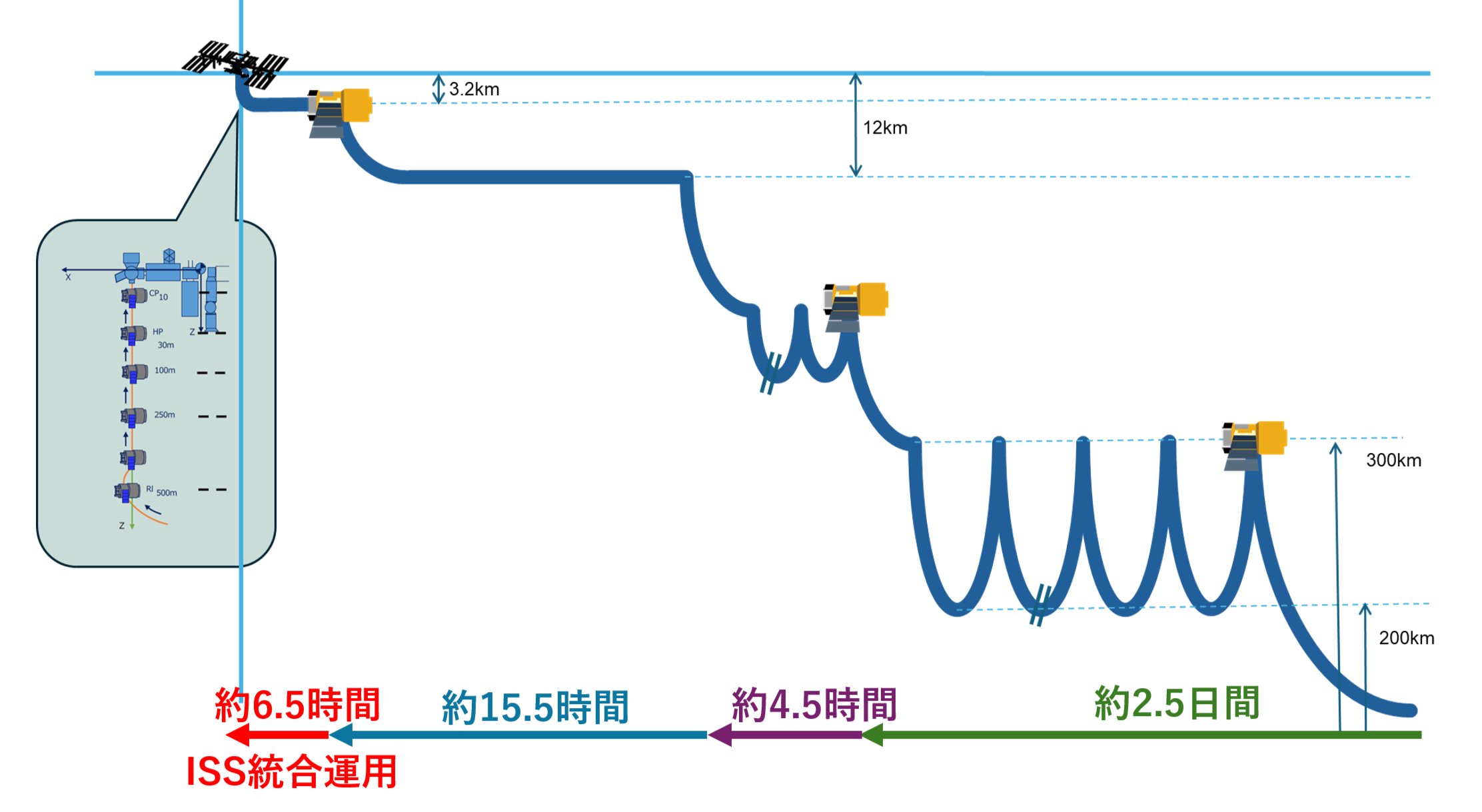
จากนั้นยานใช้เวลาราวสามวันในการค่อย ๆ ปรับวงโคจรให้สูงขึ้น เพื่อเข้าสู่ระดับเดียวกับสถานีอวกาศนานาชาติที่ราว 400 กิโลเมตรเหนือพื้นโลก ขั้นตอนนี้เรียกว่า Phasing Maneuver เป็นกระบวนการละเอียดอ่อนที่ต้องอาศัยการคำนวณการจุดเครื่องยนต์ Thruster เพื่อให้ยานไล่จังหวะโคจรให้ตรงกับสถานีโดยไม่เร่งหรือชะลอเกินไป เมื่อเข้าสู่ระยะ 4 กิโลเมตรจากสถานี ยาน HTV-X1 ก็เริ่มต้นกระบวนการที่เรียกว่า Rendezvous หรือ “การนัดพบในอวกาศ” ซึ่งใช้ทั้งระบบนำทางด้วย GPS และการสะท้อนสัญญาณเลเซอร์จากรีเฟลกเตอร์ที่ติดตั้งอยู่รอบสถานี และ “เข้ามาจากด้านล่างของสถานี” หรือ R-Bar Approach
การทำ R-Bar Approach หรือที่เรียกอีกชื่อว่า Radial Bar Approach เป็นหนึ่งในวิธีมาตรฐานที่ใช้สำหรับให้ยานอวกาศเข้าเทียบกับสถานีอวกาศนานาชาติ โดย “R” ในที่นี้หมายถึง “Radial” หรือแนวเส้นรัศมีจากศูนย์กลางของโลกไปยังสถานีอวกาศ การเข้ามาทางแนวนี้มีข้อดีทางฟิสิกส์คือแรงโน้มถ่วงของโลกช่วยควบคุมความเร็วของยานให้ช้าลงอย่างเป็นธรรมชาติ ต่างจากการเข้าทางแนว “V-Bar” ซึ่งเป็นแนวขนานกับทิศทางการโคจรของสถานีที่มักต้องอาศัยแรงขับมากกว่าในการรักษาตำแหน่ง
ในเชิงการปฏิบัติ ยาน HTV-X1 จะเริ่มจากจุด Hold Point ที่อยู่ใต้สถานีประมาณ 250 เมตร แล้วค่อย ๆ ใช้แรงขับย่อยปรับระยะขึ้นทีละขั้นจนถึงจุดที่ Canadarm2 สามารถเข้าจับได้ R-Bar Approach จึงเป็นกระบวนการที่เน้นความแม่นยำสูง ยานต้องคำนวณทั้งแรงโน้มถ่วง ความเร็วสัมพัทธ์ และทิศทางการเคลื่อนที่ให้สอดคล้องกับการหมุนรอบโลกของสถานี ขณะเดียวกันยังต้องคงความปลอดภัยของลูกเรือภายในสถานีด้วย ด้วยเหตุนี้เอง R-Bar Approach จึงกลายเป็นมาตรฐานที่ยานขนส่งเสบียงหลายรุ่นของ JAXA และ NASA เลือกใช้ เพราะให้สมดุลระหว่างประสิทธิภาพทางพลังงานกับความปลอดภัยในระดับสูงสุด
ในวันที่ 29 ตุลาคม เวลาประมาณ 15:00 เวลาสากล UTC ยานมาถึงตำแหน่ง Hold Point ที่ห่างจากสถานีราว 250 เมตร ก่อนจะสาธิตการ Retreat Test หรือการถอยห่างจำลองในกรณีฉุกเฉิน เพื่อพิสูจน์ว่ายานสามารถออกจากตำแหน่งได้อย่างปลอดภัยหากเกิดปัญหา นับเป็นขั้นตอนบังคับของทุกภารกิจที่เกี่ยวข้องกับสถานีอวกาศนานาชาติ จากนั้น HTV-X1 ได้รับสัญญาณอนุญาตให้เข้าประชิดจนถึงตำแหน่งสำหรับการจับยึด

จนกระทั่งเมื่อเวลา 15:58 เวลา UTC ยานถูกจับด้วยแขนกล Canadarm2 โดยลูกเรือชาวญี่ปุ่น Kimiya Yui ทำหน้าที่ควบคุม ร่วมกับนักบินอวกาศ Zena Cardman จาก NASA และมี Akihiko Hoshide รับหน้าที่ Capcom ที่ Tsukuba คอยประสานงานระหว่างศูนย์ควบคุมกับลูกเรือบนสถานี การจับแบบนี้ต่างจากยานขนส่งบางรุ่นที่สามารถ “Dock” เข้าสถานีได้เองโดยอัตโนมัติ ยาน HTV-X ใช้วิธีที่เรียกว่า Berthing คือให้สถานี “คว้า” มันเข้ามาด้วยแขนกล ซึ่งแม้จะใช้เวลามากกว่า แต่ให้ความปลอดภัยและความยืดหยุ่นสูงสุด
หัวใจสำคัญของการทำงานของ Canadarm2 คือ Grapple Fixture หรือ “จุดจับยึด” ที่ติดอยู่บนวัตถุที่ต้องการให้แขนกลจับ ไม่ว่าจะเป็นยานขนส่งอย่าง HTV, Cygnus, หรือโมดูลของสถานีเอง Grapple Fixture มีหน้าตาเป็นขั้วโลหะทรงกระบอกเล็ก ๆ พร้อมโครงสร้างวงแหวนที่ออกแบบมาให้ Canadarm2 สามารถ “เกี่ยวและล็อก” ได้อย่างมั่นคง ภายในหัวจับของแขนกลจะมี End Effector ซึ่งเป็นกลไกแบบ “snare cable” หรือสายโลหะเส้นบางสามเส้นที่พันอยู่รอบวงกลม เมื่อแขนกลเข้าประชิด Grapple Fixture ได้ในระยะไม่กี่เซนติเมตร สาย snare จะคลายออกเล็กน้อยแล้วหมุนเข้าด้านในเพื่อ “รัด” และ “ดึง” แกนของ Grapple Fixture เข้าหาจุดศูนย์กลางอย่างแน่นหนา

เมื่อ End Effector รัดตัว Fixture จนแน่น แขนกลจะเริ่มตรวจสอบแรงดันไฟและสัญญาณข้อมูลผ่านขั้วต่อภายใน ทำให้ระบบควบคุมบนสถานีสามารถสั่งการให้ยกหรือหมุนวัตถุได้โดยตรง กระบวนการนี้ต้องการความละเอียดสูงมาก ด้วยเหตุนี้ การควบคุม Canadarm2 จึงเป็นงานที่ต้องใช้ทั้งนักบินอวกาศฝึกเฉพาะทางบนสถานี และเจ้าหน้าที่ภาคพื้นดินช่วยคำนวณเส้นทางการเคลื่อนที่แบบเรียลไทม์
หลังจากถูกจับเข้าที่เรียบร้อย ทีมภาคพื้นและลูกเรือใช้เวลาราว 12 ชั่วโมงเพื่อเคลื่อนยานเข้าหาพอร์ตด้านล่างของโมดูล Harmony กระบวนการเชื่อมต่อผ่าน Common Berthing Mechanism หรือ CBM ต้องใช้การจัดแนวระดับมิลลิเมตร และเมื่อสลักทั้งหมดล็อกเข้าที่ ก็เป็นสัญญาณว่ายาน HTV-X1 ได้ “เทียบ” เข้ากับสถานีสำเร็จในวันที่ 30 ตุลาคม เวลา 12:58 ตามเวลาญี่ปุ่น ถือเป็นครั้งแรกของยานรุ่นใหม่ที่เข้าสู่สถานีอวกาศได้อย่างสมบูรณ์

CBM แบ่งเป็นสองส่วนคือ Active CBM ติดตั้งอยู่บนสถานี และ Passive CBM ติดอยู่บนยานหรือโมดูลที่เข้ามาเทียบ ทั้งสองส่วนมีโครงสร้างวงแหวนอลูมิเนียมขนาดเส้นผ่านศูนย์กลางราว 127 เซนติเมตร โดยบนวงแหวนจะมี Guide Fins หรือแผ่นนำแนวช่วยให้การเชื่อมต่อเข้าศูนย์กลางได้ตรงตำแหน่ง หลังจาก Canadarm2 นำยานมาวางในตำแหน่งแล้ว ระบบ Latching ชั้นแรกจะทำงาน เป็น “สลักเบื้องต้น” จำนวน 4 ชุดที่ดึงวงแหวนทั้งสองเข้าหากันอย่างหลวม ๆ เพื่อจัดแนวและตรวจสอบแรงกด จากนั้นจึงเข้าสู่ขั้นตอน Bolting ซึ่งเป็นหัวใจของ CBM การเทียบและเชื่อมต่อยาน รู้จักมาตรฐาน Docking Port ในปัจจุบัน
ในชั้นนี้จะมี สกรูขับเคลื่อนด้วยมอเตอร์ไฟฟ้า 16 ตัว กระจายรอบวงแหวนของ Active CBM ทำหน้าที่ขันเข้ากับ Capture Latch ของ Passive CBM ทีละตัวจนแน่นทุกจุด แรงบิดแต่ละตัวอยู่ในระดับหลายร้อยนิวตันเมตร ทำให้โครงสร้างทั้งสองยึดแน่นจนกลายเป็นผนังเดียวกัน เมื่อระบบยึดทั้งหมดล็อกครบ วงแหวนด้านในจะถูกกดเข้าหากันจน ซีลยางแบบ Dual O-ring ซีลสองชั้น เกิดการปิดผนึกแน่นหนา ป้องกันการรั่วของอากาศระหว่างโมดูล จากนั้นจึงเริ่มขั้นตอนตรวจสอบแรงดันหรือ Leak check เพื่อให้แน่ใจว่าไม่มีช่องว่างระหว่างยานกับสถานี
ประตูของ HTV-X1 ถูกเปิดในวันเดียวกันหลังการตรวจสอบความดันและการรั่วซึม ลูกเรือเริ่มขนส่งสิ่งของภายในทันที ตั้งแต่อาหารสด ตัวอย่างชีวภาพ ไปจนถึงอุปกรณ์ทดลองใหม่ ๆ ที่ต้องอยู่ภายใต้การควบคุมอุณหภูมิ ตลอดหลายสัปดาห์ต่อจากนี้ ยานจะทำหน้าที่เป็นห้องเก็บของชั่วคราวให้กับสถานี ก่อนจะถูกบรรจุด้วยขยะและอุปกรณ์ที่หมดอายุการใช้งานเพื่อเตรียมทำลายเมื่อกลับสู่ชั้นบรรยากาศ
แม้ HTV-X จะไม่สามารถนำสัมภาระกลับโลกได้เหมือนยาน Dragon ของ SpaceX แต่ก็ไม่ได้หมายความว่าญี่ปุ่นจะขาดขีดความสามารถในด้าน “Return Logistics” เสมอไป แนวโน้มใหม่ของเทคโนโลยีอวกาศกำลังเปลี่ยนแนวคิดเรื่องการขนส่งกลับจาก “ยานใหญ่กลับทีเดียว” ไปสู่การส่งของกลับแบบ Distributed Return คือการใช้ยานขนาดเล็กหรือแคปซูลขนส่งเฉพาะภารกิจ ที่สามารถปล่อยจากสถานีได้บ่อยขึ้นและเฉพาะทางมากขึ้น เช่น การส่งตัวอย่างชีวภาพที่ต้องกลับอย่างรวดเร็ว หรือชิ้นส่วนอุปกรณ์ที่ต้องตรวจสอบบนโลกโดยไม่ต้องรอภารกิจใหญ่รอบถัดไป

HTV-X1 จะเทียบอยู่กับสถานีไปจนถึงประมาณเดือนเมษายน 2026 จากนั้นจะเข้าสู่ภารกิจต่อเนื่องเพื่อทดสอบเทคโนโลยีอัตโนมัติขั้นสูง เช่น การนำทางด้วย AI การปล่อยดาวเทียมขนาดเล็ก และการประเมินความทนทานของระบบก่อนเผาไหม้เหนือมหาสมุทรแปซิฟิกในช่วงกลางปี 2026 ภารกิจนี้ไม่เพียงเป็นการส่งเสบียงเท่านั้น แต่ยังเป็นการประกาศศักยภาพของญี่ปุ่นในยุคใหม่ ที่ไม่เพียงสร้างยานอวกาศที่ปลอดภัยและแม่นยำที่สุดลำหนึ่งในโลก แต่ยังแสดงให้เห็นถึงความตั้งใจที่จะเป็นกำลังสำคัญในระบบโลจิสติกส์อวกาศโลก ทั้งในปัจจุบันและยุคหลังสถานีอวกาศนานาชาติในอนาคต
การกลับมาของยานขนส่งญี่ปุ่นสู่สถานีอวกาศในรอบกว่า 5 ปีคือภาพที่เต็มไปด้วยทั้งความภาคภูมิใจและความรู้สึก “สมกับการรอคอย” เพราะหลังจากภารกิจ Kounotori 9 สิ้นสุดในปี 2020 ญี่ปุ่นก็เว้นช่วงยาวในการพัฒนายานรุ่นใหม่ที่ไม่ใช่แค่การอัปเกรดเทคโนโลยี แต่เป็นการสร้างระบบขนส่งรุ่นต่อไปของประเทศอย่างแท้จริงภารกิจครั้งนี้คือการกลับมาที่ไม่ได้มีเพียง “สัมภาระ” แต่บรรทุกทั้งศักดิ์ศรี ความพากเพียร และความฝันของชาติที่ไม่เคยละทิ้งความฝันจะเป็นส่วนหนึ่งของอนาคต
เรียบเรียงโดย ทีมงาน Spaceth.co