เทคโนโลยีการเทียบยาน (Berthing) และเทคโนโลยีการเชื่อมต่อยาน (Docking) คือหนึ่งในเทคโนโลยีที่ปฏิวัติการสำรวจอวกาศไปอย่างสิ้นเชิง เราไม่จำเป็นต้องส่งยานขนาดใหญ่ออกไปชิ้นเดียวอีกต่อไป แต่สามารถทยอยส่งออกไปประกอบกันกลางอวกาศทีละชิ้นได้ ทำให้การส่งวัตถุขึ้นไปในอวกาศง่ายขึ้นบนพื้นฐานที่ว่าเราไม่จำเป็นต้องส่งยานหรือโมดูลที่สมบูรณ์ที่สุดออกไป แต่ค่อย ๆ ต่อเติมทีหลังได้เมื่อมีความสามารถ และเป็นที่มาของการสร้างสถานีอวกาศ อย่างสถานีอวกาศนานาชาติ (International Space Station หรือ ISS) ที่อาศัยการส่งโมดูลขึ้นไปประกอบทีละชิ้น
สำหรับการประกอบสถานีอวกาศนานาชาติ สามารถอ่านได้จาก ประกอบโมดูลใหม่ ISS อย่างไร ในยุคที่ไร้กระสวยอวกาศ เบื้องหลังการต่อ Nauka เข้ากับ ISS
ความแตกต่างระหว่างการ Berthing และการ Docking
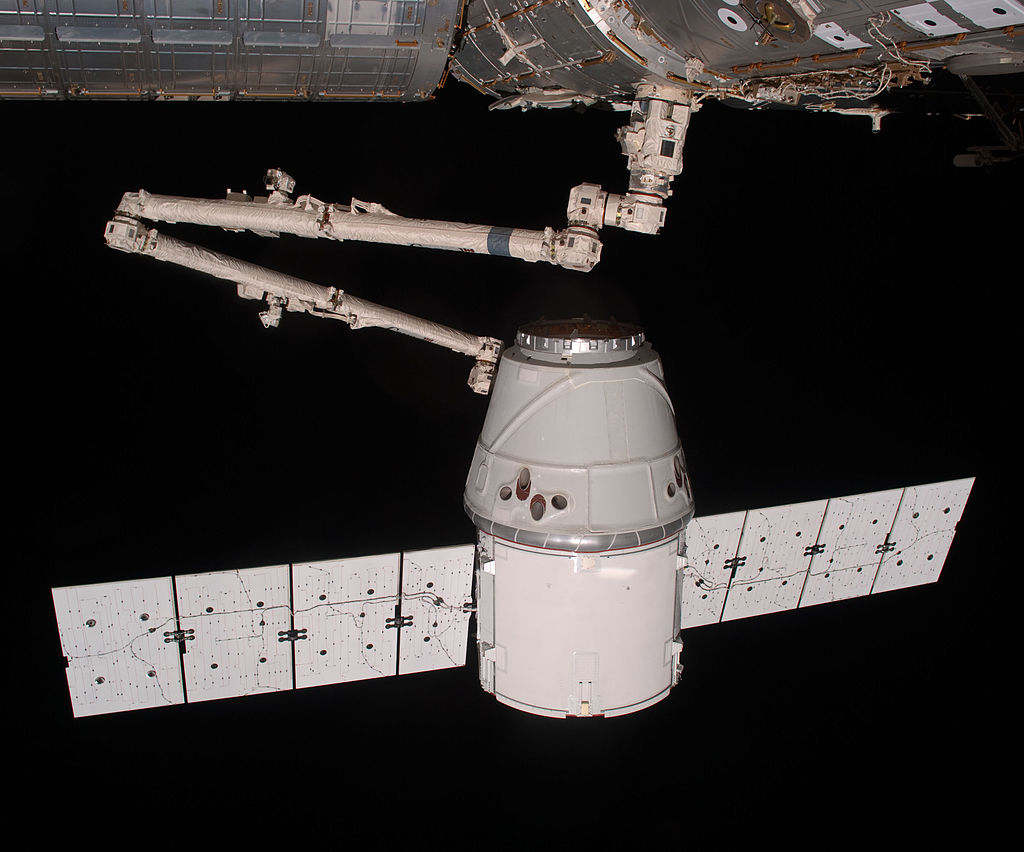
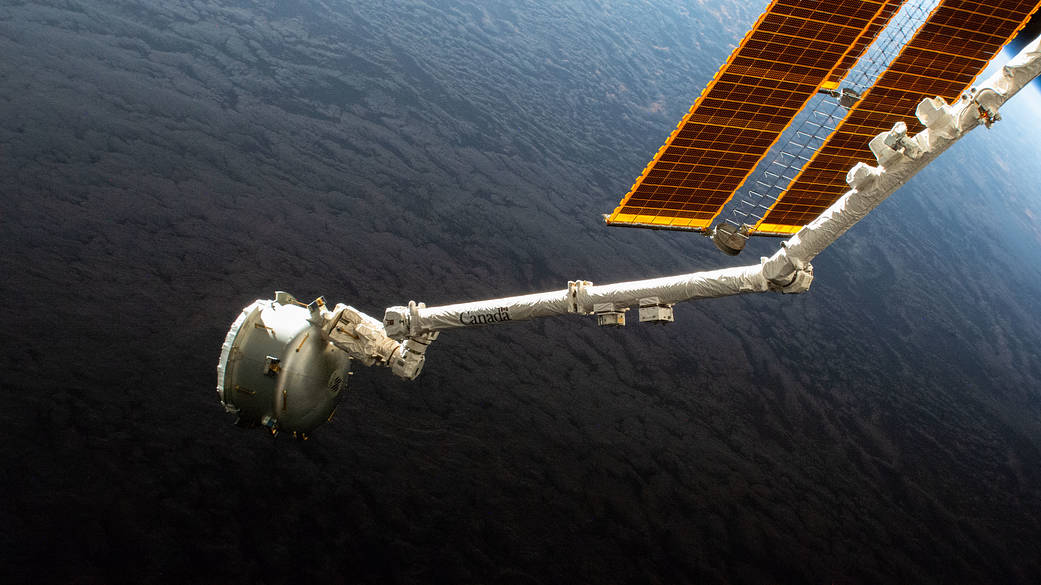
การ “Berthing” เป็นการเทียบยานในลักษณะที่ต้องมีอุปกรณ์มาช่วยในการเทียบยาน ลักษณะเดียวกันกับเรือขนาดใหญ่ที่ต้องมีเรือลากจูงมาช่วยในการเทียบท่า ในกรณีของยานอวกาศ ยานที่ไม่สามารถเทียบยานด้วยตัวเองได้อาจอาศัยแขนกลของยานอีกลำในการช่วยเทียบยาน เรียกว่า “Berthing” เช่น ISS ที่ใช้แขนกล Canadarm2 ในการจับและลากยานไปเทียบท่า หรือการใช้แขนกลของกระสวยอวกาศ (Space Shuttle) ในการลากจูงกล้องโทรทรรศน์อวกาศฮับเบิล (Hubble Space Telescope หรือ HST) มาเทียบยาน
การ “Docking” เป็นการเทียบยานในลักษณะที่ยานสามารถเทียบตนเองเข้ากับเป้าหมายได้ด้วยพลังของตนเอง ปราศจากการช่วยเหลือของยานเป้าหมาย เช่น การใช้ระบบจรวดปรับทิศทาง (Attitude Control System) ในการเข้าเทียบท่ากับ Docking Port

ตัวอย่างของยานอวกาศที่เชื่อมต่อด้วยการทำ Docking ก็เช่น ยาน Soyuz ของรัสเซีย ที่เป็นหนึ่งในยานอวกาศรุ่นแรก ๆ ที่มีความสามารถในการ Docking ได้แบบอัตโนมัติด้วยระบบคอมพิวเตอร์ หรือยานอวกาศแบบคนโดยสารอย่างกระสวยอวกาศ, ยาน Dragon ก็ใช้การเชื่อมต่อเข้ากับสถานีฯ ผ่านการทำ Docking โดยการ Docking มีข้อดีเหนือกว่าการ Docking คือความเร็วในกระบวนการ Dock และ Undock เหมาะแก่การใช้งานในยานอวกาศที่มีลูกเรือ ซึ่งสำคัญต่อปัจจัยด้านความปลอดภัย เช่น ความเร็วในการอพยพนักบินอวกาศออกจากสถานี
แล้วในกรณีใดที่การ Berthing จะมีประโยชน์มากกว่าการ Docking
การ Berthing จำเป็นต้องใช้อุปกรณ์ชิ้นที่สามในการช่วยให้ยานสองลำสามารถเชื่อมต่อกันได้ อุปกรณ์ดังกล่าวก็คือ แขนกล แต่ถ้ายานที่เรากำลังพูดถึงคือสถานีอวกาศ การมีแขนกลไว้ใช้ Berthing หมายความว่าเราสามารถติดแขนกลไว้ที่สถานีอวกาศเพื่อใช้ซ้ำได้กับยานทุกลำที่มาเชื่อมต่อกับสถานีอวกาศ นั่นหมายความว่าเราจะไม่จำเป็นต้องติดตั้งระบบ Attitude Control สำหรับการเทียบยานให้กับยานที่มาเทียบท่า ประหยัดระบบคอมพิวเตอร์และระบบจรวดควบคุมทิศทางไปได้ โดยเฉพาะอย่างยิ่งกับยานหรือโมดูลที่มักจะเทียบยานไว้กับสถานีอวกาศอย่างถาวร การติดระบบคอมพิวเตอร์และระบบจรวดมาหมายความว่ามันจะได้ใช้ครั้งเดียว คือ ตอนเทียบยานกับสถานีอวกาศเท่านั้น

ดังนั้น Berthing จึงมักมีประโยชน์กับยานหรือโมดูลที่จะถูกติดตั้งอย่างถาวรหรือยานที่ไม่มีความจำเป็นต้องติดตั้งระบบเทียบยานไว้ตลอด เพราะการเทียบยานนั้นเกิดขึ้นไม่บ่อย เช่น ในกล้องโทรทรรศน์อวกาศ นอกจากนี้ สังเกตว่ายานขนส่งแทบทุกชนิด เช่น Cargo Dragon หรือ Cygnus จะใช้การ Berthing หมดเลย แทบไม่มีระบบไหนที่ใช้การ Docking เลย นี่เป็นเพราะว่าการระบบ Common Berthing Mechanism หรือ CBM ซึ่งใช้ในการ Berth ยานอวกาศกับ ISS นั้นไม่มีระบบซับแรงกระแทกหรือที่เรียกว่า “Soft Capture” ทำให้หากเชื่อมต่อด้วยวิธีการ Docking แรงจากการเชื่อมต่อจะถูกส่งไปยังโครงสร้างสถานีโดยตรงและอาจเกิดความเสียหายได้ การ Berth ด้วยแขนกลมีความนุ่มนวลกว่าจึงถูกใช้ในการเชื่อมต่อยานขนส่ง
Androgyny ของ Docking/Berthing Port
รู้หรือไม่ว่าระบบ Docking/Berthing ก็มีระบบตัวผู้ตัวเมีย คล้ายกับเต้ารับไฟที่มีฝั่งตัวผู้และฝังตัวเมีย ในระบบ Docking/Berthing เราเรียกระบบที่มีเพศว่า “Non-androgynous” ส่วนระบบที่ไม่มีเพศ เราเรียกว่า “Androgynous”
ระบบ Docking/Berthing ในยุคแรกเริ่มของการทดลองเทียบยานในอวกาศนั้นเป็นระบบ Non-androgynous ทั้งหมด หมายความว่า Port ของยานอวกาศจะมีตัวหนึ่งที่เป็นตัวผู้ และยานอีกลำหนึ่งจะต้องเป็นตัวเมีย โดยการเทียบยานและเชื่อมต่อสามารถทำได้ระหว่าง Docking Port ที่เป็นตัวผู้และตัวเมียเท่านั้น ยานที่มี Port ตัวเมียจะไม่สามารถเชื่อมต่อกับยานอีกลำที่มี Port ตัวเมียได้ เช่นเดียวกับในกรณีของ Port ตัวผู้ ดังนั้นการออกแบบระบบเทียบยานจะต้องคำนึงไว้ว่ายานลำใดควรใช้ Port ตัวผู้ ยานลำใดควรใช้ Port ตัวเมีย
ในกรณีของระบบแบบ Androgynous นั้น หากแปลตรงตัวคือ Port ที่เป็นได้ทั้งสองเพศ กล่าวคือเราสามารถเลือกได้ว่าจะให้ Port เป็นตัวผู้หรือตัวเมีย ดังนั้นหากเรามียานสองลำที่มีระบบเทียบยานแบบ Androgynous เราจะต้องเลือกว่าจะให้ตัวใดเป็นตัวผู้ และตัวใดเป็นตัวเมีย ยกตัวอย่างเช่น ในการเทียบยานกับสถานีอวกาศ Port ของสถานีอวกาศมักจะทำหน้าที่เป็นตัวเมีย หรือที่เรียกว่า “Passive Port” ในระบบ Androgynous ส่วนยานที่เข้ามาเทียบท่าจะทำหน้าที่เป็น “Active Port”
ระบบ Docking/Berthing ที่ใช้กันอย่างแพร่หลายในปัจจุบัน
ระบบ Docking/Berthing ในปัจจุบันมีมากกว่า 10 ชนิด ใช้แตกต่างกันไปในยานแต่ละลำและผู้ผลิตหรือผู้พัฒนาแต่ละคน ยกตัวอย่างเช่น NASA ซึ่งใช้ระบบ Docking/Berthing ไม่เหมือนกับ Roscosmos ของรัสเซีย แต่ปัจจุบันมีมาตรฐานการเชื่อมต่อหลัก ๆ อยู่ 3 มาตรฐาน คือ Common Berthing Mechanism (CBM), APAS-95 และ International Docking System Standard (IDSS)
Common Berthing Mechanism (CBM)
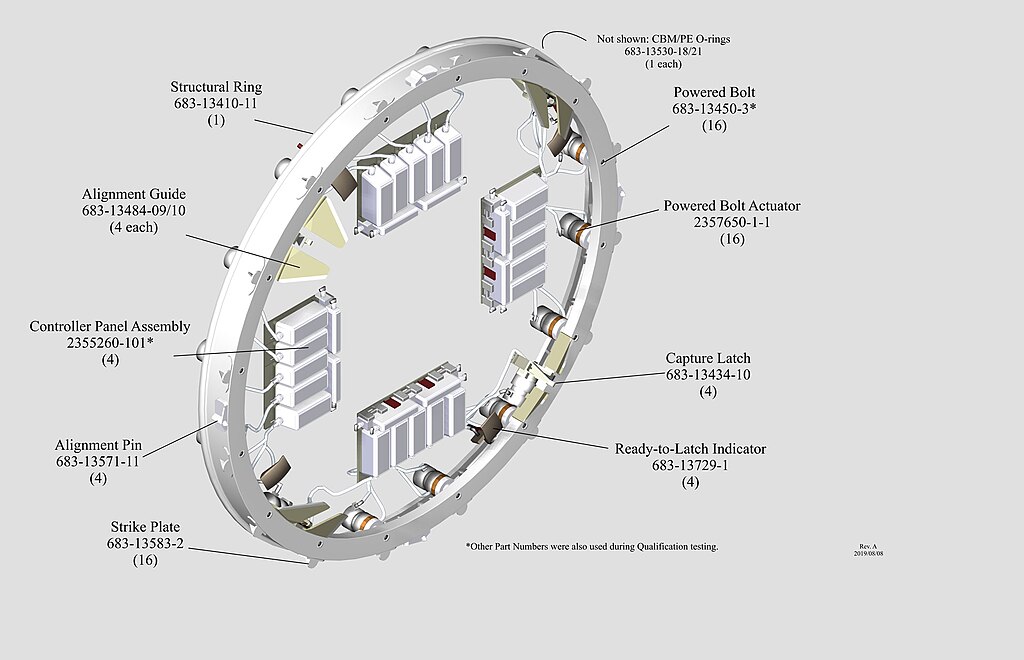
CBM เป็นระบบ Berthing แบบ Non-androgynous หรือแบบมีเพศ ใช้ใน ISS เป็นหลักใน US Orbital Segment หรือ ISS ฝั่งสหรัฐอเมริกา พัฒนาขึ้นมาโดย NASA และ Boeing เพื่อใช้ในการเชื่อมต่อโมดูลสำหรับอยู่อาศัยบน ISS เนื่องจาก CBM มีเพศ จึงแบ่งเป็นแบบ Active CBM (ACBM) หรือฝั่งตัวผู้ และ Passive CBM (PCBM) หรือฝั่งตัวเมีย
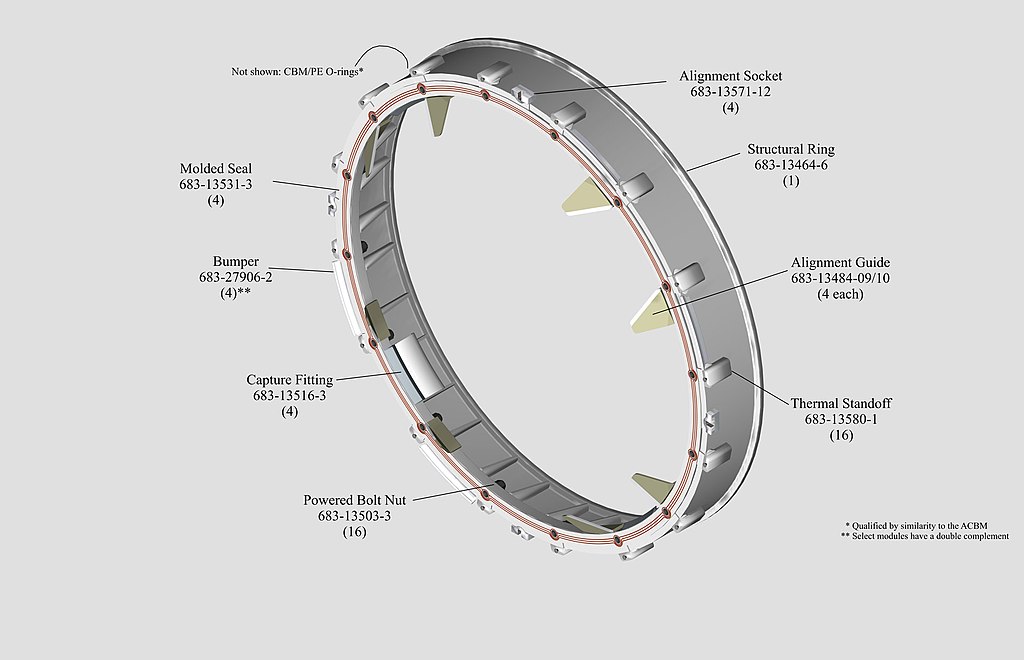
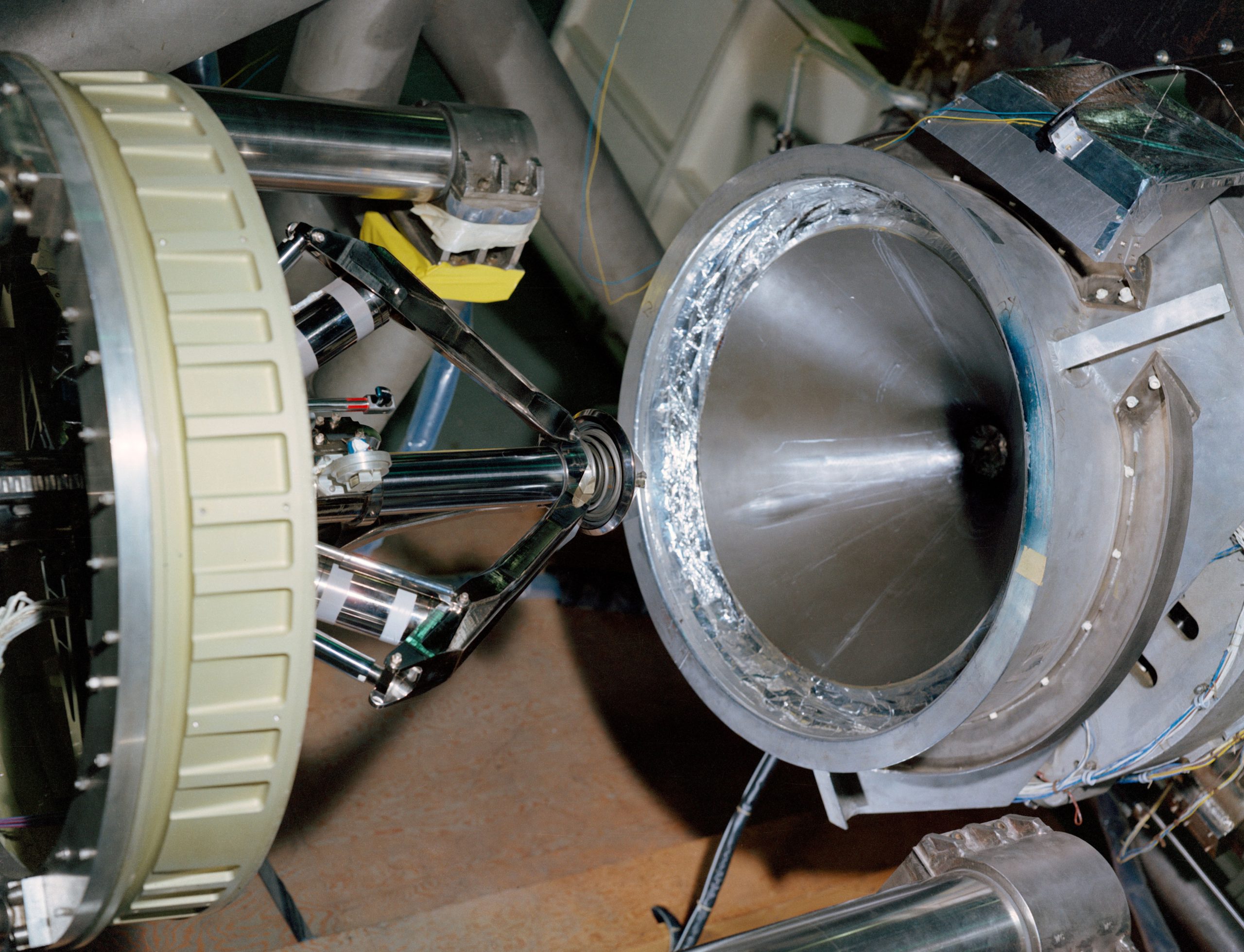
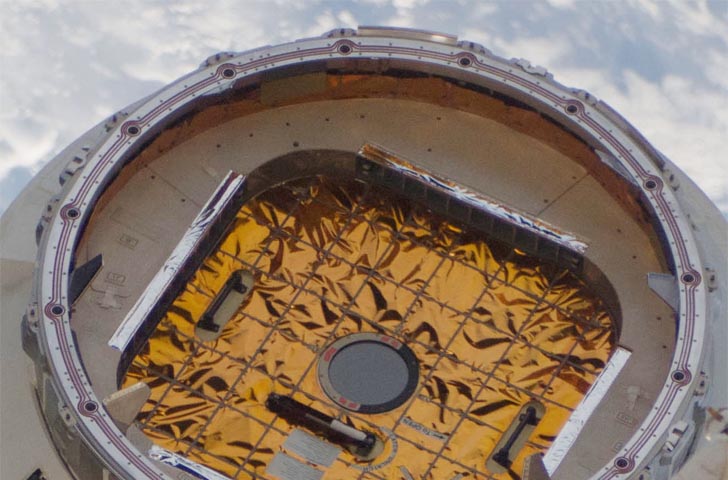
PCBM นั้นถูกออกแบบมาเพื่อรับการเชื่อมต่อจาก ACBM เท่านั้น จึงมีลักษณะเป็นวงแหวนธรรมดา ในขณะที่ ACBM นั้นมีระบบ “Capture Latch” เพื่อล็อก PCBM เข้ากับตัวมันเอง รวมทั้งมีระบบสำหรับการควบคุมการเทียบยานอยู่ตรงกลาง ดังนั้น ACBM จึงมักติดตั้งอยู่ในโมดูลหรือยานที่ต้องมีการเชื่อมต่อเข้าออกบ่อย ๆ เพื่อให้สามารถใช้ซ้ำได้ เช่น โมดูลของ ISS ในขณะที่ยานที่เข้ามาเทียบท่ามักเป็น PCBM ที่สามารถใช้แขนกลของ ISS ลากมาเชื่อมต่อได้
เมื่อเทียบยานและ Pressurize แล้วแล้วลูกเรือจะต้องนำอุปกรณ์ของ ACBM ที่ขวางอยู่ตรงกลางออก เพื่อให้มีช่องว่างระหว่าง Port ทั้งสองฝั่งไว้สำหรับให้ลูกเรือข้ามไปอีกฝั่งได้ เส้นผ่านศูนย์กลาง 1.8 เมตร นอกจากนี้ยังมีช่องสำหรับการติดตั้งสายไฟระหว่าง Port ทั้งสองฝั่งได้ หากจะ Unberth ลูกเรือก็จะต้องทำย้อนกลับโดยการเอาอุปกรณ์ ACBM ไปติดตั้งตามเดิม

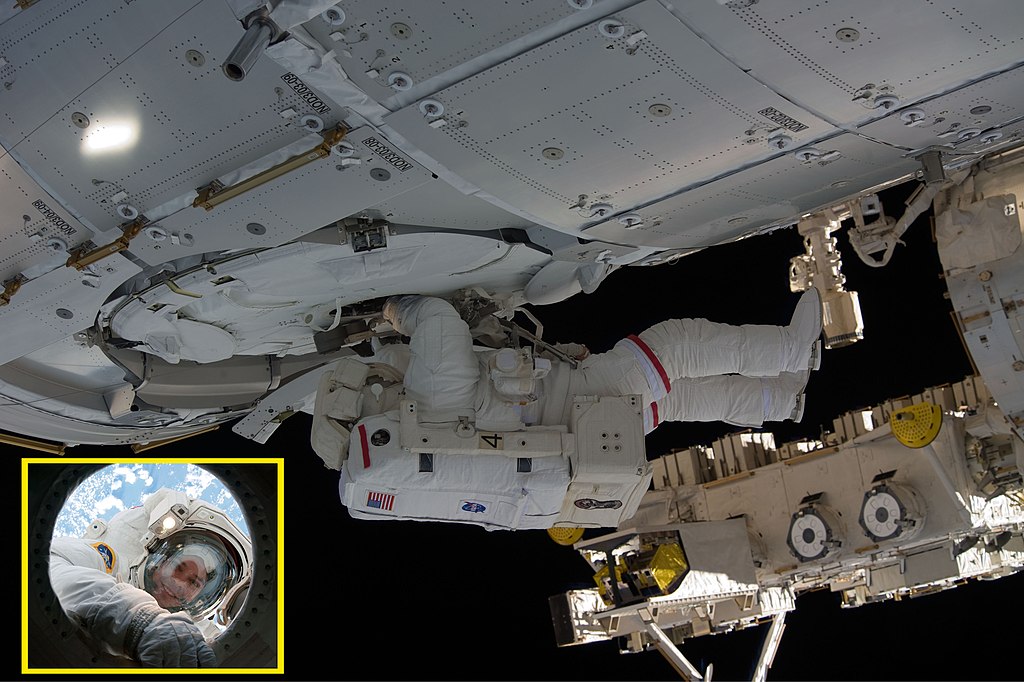
ก่อนการเชื่อมต่อ PCBM นั้น ลูกเรือจะต้องทำการ EVA (Extravehicular Activity) หรือออกไปนอกอวกาศเพื่อถอดฝาครอบ PCBM ออก เช่นเดียวกับ ACBM ส่วนฝั่งของ ACBM นอกจากการถอดฝาครอบแล้วจะต้องมีการทดสอบระบบควบคุมและระบบ Latch ในการเชื่อมต่อเพิ่มเติม โดยการเชื่อมต่อระหว่าง ACBM และ PCBM นั้นอาศัยการใช้แขนกลเพื่อนำ ACBM เข้าหา PCBM จากนั้นระบบควบคุมของ ACBM จะไขน็อตเข้ากับ PCBM เพื่อ “Soft dock” ก่อนที่จะ “Hard dock” ด้วยการไขน็อตระหว่างสองฝั่งให้สุด
สังเกตว่าระบบ CBM นั้นมีขั้นตอนการเทียบที่ซับซ้อน จึงมักใช้เป็นระบบ Berthing สำหรับโมดูลหรือยานอวกาศที่เทียบอยู่ถาวรเท่านั้น ดังเช่นในสถานีอวกาศ แต่ก็มีวิศวกรจีเนียสเอาระบบ CBM ไปดัดแปลงจนใช้ทำอะไรแปลก ๆ ได้ เช่น การทิ้งขยะออกนอกอวกาศจาก ISS หรือการปล่อย CubeSat จากสถานีอวกาศ
ยกตัวอย่างเช่น Nanoracks Bishop Airlock ที่ผู้เขียนขออนุญาตตั้งชื่อเล่นมันว่า “ถังขยะอวกาศ” โดยการทำงานของมันคือเป็นระบบ Airlock ที่ติดตั้ง PCBM ไว้สำหรับเชื่อมต่อเข้ากับ ACBM ของ ISS เมื่อจะทิ้งขยะก็เพียงแค่เอาขยะมากองไว้ใน Nanorack Bishop Airlock จากนั้นจึง Unberth แล้วใช้แขนกลลากตัว Airlock ออกไปเทขยะ เสร็จแล้วค่อยลากกลับมาเชื่อมต่อกับ ACBM อีกครั้ง การปล่อย CubeSat ก็มีลักษณะเดียวกัน
International Docking System Standard (IDSS)
IDSS เป็นมาตรฐานระบบ Docking ใหม่ที่ตกลงขึ้นมาระหว่าง NASA, Roscosmos, JAXA, ESA และ Canadian Space Agency เพื่อการใช้งานใน ISS โดย IDSS เป็นระบบ Docking แบบ Androgynous หรือแบบเป็นได้ทั้งตัวผู้และตัวเมีย หรือจะเลือกเป็นเพศใดเพศหนึ่งแต่แรกก็ได้ เมื่อเชื่อมต่อแล้วเกิดช่องว่างระหว่าง Port เส้นผ่านศูนย์กลาง 0.8 เมตร ซึ่งเล็กกว่าระบบ CBM ที่ 1.8 เมตร
IDSS ใช้ระบบ Soft Capture และระบบ Hard Capture โดย Active Port และ Passive Port จะล็อกซึ่งกันและกันที่ระยะหนึ่งก่อน โดย Active Port จะยื่นส่วนในการเชื่อมต่อออกมาเพื่อรับการเชื่อมต่อ ทั้งนี้ระบบ Soft Capture มีไว้เพื่อลดแรงกระแทกระหว่างยานสองลำที่กำลังเชื่อมต่อกันโดย Soft Capture มีไว้เพื่อ “Dampen” แรงจากยานที่กำลังเคลื่อนที่อยู่ เมื่อล็อกเข้าที่แล้วจึงค่อยเริ่ม Hard Capture ด้วยการลากวงแหวนของ Port เข้าหากันและล็อกซึ่งกันและกันด้วยน็อต Latch
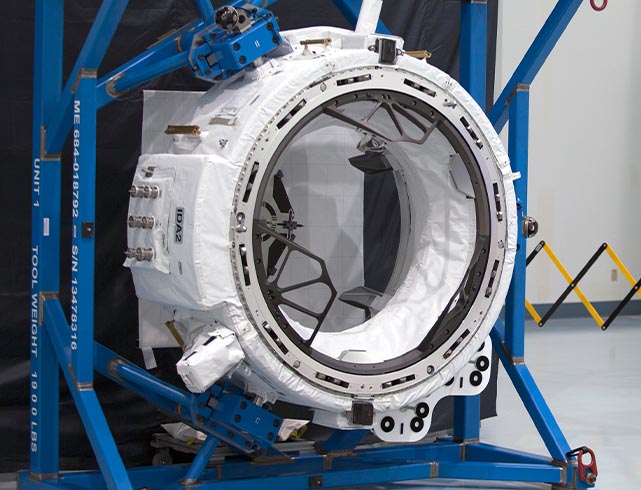
ปัจจุบัน IDSS ถูกใช้ในยานอวกาศ เช่น Crew Dragon, Cargo Dragon และ Starliner ร่วมกับ IDA Port บน ISS และจะถูกใช้ในสถานีอวกาศ Lunar Gateway ในอนาคต — แล้ว IDA Port คืออะไร?
รู้จัก Adapter ของ Docking Port
Docking Port แต่ละแบบก็เหมือนหัวชาร์จที่มี Form Factor ต่างกัน ไม่ว่าจะเป็น Lightning, USB Type C, USB Type A, Micro USB และอื่น ๆ อีกมากมาย แน่นอนว่าระบบ Form Factor ที่ต่างกันไม่สามารถเชื่อมต่อกันได้ เช่น เราไม่สามารถเอา Micro USB มาต่อ iPhone ที่ใช้ Lightning Port ได้ หากจะใช้ร่วมกันจึงต้องมี Adapter เพื่อแปลงหัว Form Factor หนึ่งไปอีก Form Factor หนึ่ง Docking Port ก็เช่นกัน
IDSS เกิดขึ้นมาหลัง ISS ดังนั้นเราก็พอจะเดาได้แล้วว่า Docking Port บน ISS ทั้งหมดไม่มีแบบไหนเลยที่เข้ากันได้กับ IDSS หากจะสลับมาใช้งาน IDSS เป็นหลักหมายความว่าจะต้องแปลง Docking Port ใด ๆ ก็ตามบน ISS ให้เข้ากันได้กับ IDSS และสิ่งนั้นก็คือ “IDA” หรือ “International Docking Adapter“
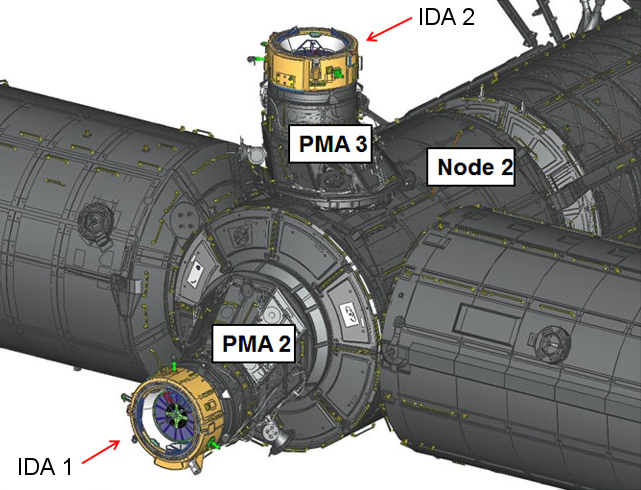
ก่อนหน้า IDA มี Adapter ที่ชื่อว่า “PMA” หรือ “Pressurized Mating Adapter” ซึ่งใช้สำหรับแปลง CBM ของฝั่ง US Orbital Segment เป็น APAS-95 Port ซึ่งเป็น Port หลักของ ISS ฝั่งรัสเซีย โดย PMA ใช้ในการเชื่อมต่อ US Orbital Segment เข้ากับ Russian Orbital Segment หรือที่เรียกว่า PMA-1 นอกจากนี้ยังมี PMA-2 และ PMA-3 ซึ่งใช้สำหรับการต่อกระสวยอวกาศและยานอวกาศอื่น ๆ ในยุคกระสวยอวกาศ
IDA ถูกออกแบบมาให้แปลง PMA เป็น IDSS อีกที ดังนั้นหมายความว่า ISS มีระบบเทียบยานทีแปลงจาก CBM เป็น APAS-95 และ IDSS อีกทีด้วย Adapter สองตัว คือ PMA และ IDA จึงเป็น Adapter ต่อ Adapter อีกที
เห็นได้ว่าเทคโนโลยีการ Berthing และ Docking ที่ดูเหมือนจะง่าย แต่แท้จริงแล้วซับซ้อนและอาศัยการว่างแผนในระยะยาวสูง ต้องอาศัยการตกลงกันก่อนว่าจะใช้ Port แบบใดเป็นมาตรฐานหลักเพื่อลดความจำเป็นในการสร้าง Adapter มาแปลงแล้วแปลงอีกดั่งในกรณีของ PMA และ IDA
อ่านเพิ่มเติม เจาลึกความพยายามของอินเดียในการเชื่อมต่อยานในอวกาศ กับภารกิจ SpaDeX
เรียบเรียงโดย ทีมงาน Spaceth.co