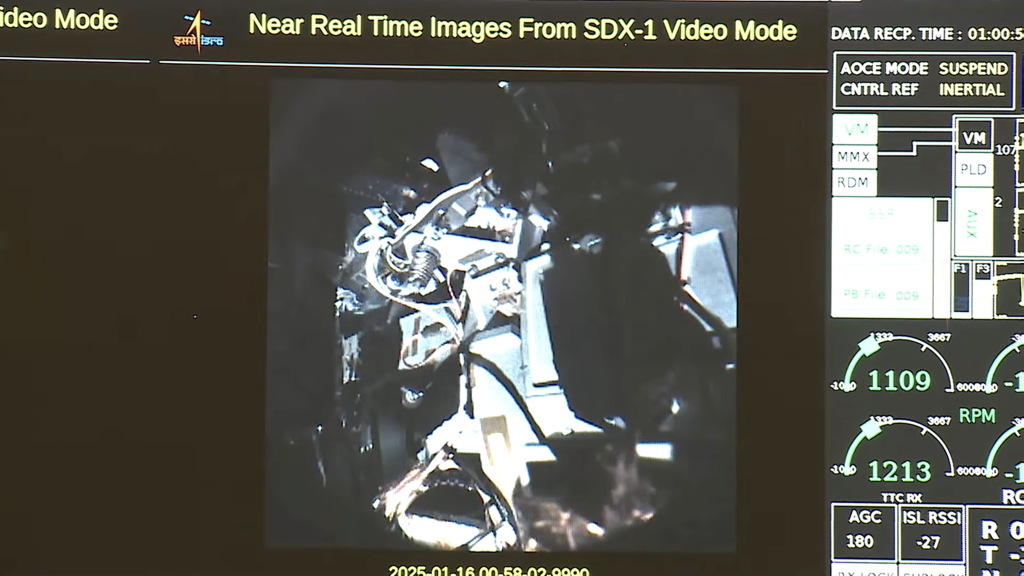
อัพเดท อินเดีย ประสบความสำเร็จในการเชื่อมต่อยาน SpaDeX ทั้งสองลำเรียบร้อยในวันที่ 16 มกราคม 2025 เวลาประมาณสิบเอ็ดโมงครึ่ง ตามเวลาประเทศไทย ตัวยานสองลำเข้าใกล้กันที่ระยะ 15 เมตร และ 3 เมตรตามลำดับก่อนที่จะเชื่อมต่อกันในที่สุด ถือว่าประสบความสำเร็จตามที่ตั้งใจไว้
หลังจากการทดสอบ ตัวยานจะถอนตัวออกจากกัน และต่างคนจะต่างไปปฏิบัติภารกิจในการเป็นดาวเทียมการทดลอง ตาม Payload ที่ได้ถูกบรรทุกไว้ด้านใน เป็นการจบสิ้นภารกิจ SpaDeX
30 ธันวาคม 2024 จรวด PLSV ของอินเดียได้พายานอวกาศขนาดเล็กลำละ 200 กิโลกรัมสองลำ ได้แก่ SpaDeX (Space Docking Experiment) หมายเลข SDX-01 และ SDX-02 เดินทางสู่วงโคจรที่ระดับความสูง 475 กิโลเมตร เพื่อเตรียมทดสอบการเชื่อมต่อกันกลางอวกาศ หรือการทำ Docking แบบที่เราพูดถึงกันโดยทั่วไป ซึ่งเทคโนโลยีการ Docking ของอินเดียนี้ ได้รับการพัฒนาโดยองค์การอวกาศอินเดียหรือ ISRO ซึ่งหากทำสำเร็จ อินเดียจะครอบครองเทคโนโลยีสำคัญที่นำไปสู่การออกแบบและพัฒนาภารกิจอวกาศที่ซับซ้อนมากขึ้นในอนาคต โดยเฉพาะภารกิจ Chandrayaan 4 ที่มีเป้าหมายในการเดินทางไปเก็บตัวอย่างดินจากดวงจันทร์กลับสู่โลก

ในบทความนี้เราจะมาพูดถึงความทะเยอทะยานของอินเดียในการพัฒนาเทคโนโลยี Rendezvous (รอนเดวู) หรือการนำเอายานอวกาศสองลำมาเจอกันในวงโคจร และการ Docking ทั้งในแง่มุมของวิศวกรรมและโอกาสของอินเดียที่จะนำเทคโนโลยีดังกล่าวมาอยู่ในภารกิจสำรวจอวกาศโดยหุ่นยนต์ หรือแม้กระทั่งโครงการอวกาศแบบมีมนุษย์ของอินเดีย
รู้จักกับประวัติศาสตร์และความสำคัญของการเชื่อมต่อยานอวกาศ
ประวัติศาสตร์การทำ Rendezvous และ Docking นั้นต้องย้อนกลับไปในยุคโครงการ Gemini ในช่วงปี 1965 แม้ว่าตอนนั้น มนุษยชาติจะประสบความสำเร็จในการส่งยานอวกาศไปยังดาวเคราะห์ต่าง ๆ หรือแม้กระทั่งดวงจันทร์ แต่การส่งยานอวกาศสองลำขึ้นไปเจอกันในอวกาศนั้น ยังไม่เคยเกิดขึ้นมาก่อน
ในปี 1965 สหรัฐฯ อเมริกาได้ประสบความสำเร็จในการทำ Rendezvous เป็นครั้งแรก โดย Rendezvous นั้นก็หมายถึงการนัดพบ หรือนัดเจอกัน ในที่นี้คือยานอวกาศสองลำได้แก่ยาน Gemini 6 และ Gemini 7 ในภารกิจทดสอบความสามารถในการบังคับยานให้มาเจอกันในอวกาศ ซึ่งเป็นหนึ่งในเทคโนโลยีสำคัญที่จะนำไปสู่ภารกิจการเดินทางสู่ดวงจันทร์ในโครงการ Apollo (ในภารกิจดังกล่าวนั้น จริง ๆ Gemini 6 จะต้องขึ้นไป Rendezvous กับ Agena Target Vehicle แต่แผนก็ดันเปลี่ยนเมื่อตัวยานเกิดระเบิดระหว่างปล่อย)

ต่อมาในปี 1966 ในภารกิจ Gemini 8 นั้น NASA ก็ประสบความสำเร็จในการเชื่อมต่อเข้ากับ Agena Target Vehicle นับเป็นการ Docking ครั้งแรกในอวกาศ โดยการทำ Rendezvous และ Docking ในครั้งนั้นเป็นการผสมผสานระหว่างการคำนวณด้วยคอมพิวเตอร์ ร่วมกับการบังคับด้วยมือจากนักบินอวกาศ ซึ่งในตอนนั้นก็คือ Neil Armstrong และ David Scott ส่วนการ Rendezvous และ Docking ที่เป็นการบังคับด้วยคอมพิวเตอร์แบบอัตโนมัตินั้น เกิดขึ้นในปี 1967 ในภารกิจ Kosmos 186 และ Kosmos 188 ซึ่งนำเอายาน Soyuz สองลำมาทดสอบเชื่อมต่อกันในวงโคจรเป็นครั้งแรก
ความสามารถในการ Rendezvous และ Docking นั้น ช่วยนำพาให้มนุษย์ออกแบบภารกิจที่ซับซ้อน อย่างเช่น Apollo ที่ยาน Command Module กับ Lunar Module จะต้องมาเชื่อมกันเพื่อพาลูกเรือเดินทางกลับโลกหลังจากที่บินขึ้นจากผิวของดวงจันทร์ หรือภารกิจการเดินทางไปยังสถานีอวกาศต่าง ๆ ที่ต้องอาศัยการคำนวณเส้นทางการเดินทางอย่างแม่นยำ หรือแม้กระทั่งในอนาคตที่ SpaceX จะบังคับให้ยาน Starship สองลำขึ้นไปเจอกันในวงโคจรเพื่อโอนถ่ายเชื้อเพลิงให้แก่กันได้ ดังนั้นหากประเทศใดครอบครองเทคโนโลยีดังกล่าว ประเทศนั้นก็จะสามารถออกแบบภารกิจที่ซับซ้อน เช่น ภารกิจ Sample Return ที่เป็นการเก็บตัวอย่างหิน ที่ตัวยานลงจอดจะต้องขึ้นมาเจอกับยานแม่
จริง ๆ แล้วการทำ Rendezvous กับ Docking นั้นเป็นสองศาสตร์ที่แยกกัน แต่มักจะถูกนำมาใช้ในภารกิจเดียวกัน เนื่องจากถ้า Rendezvous แล้วไม่มา Docking กัน ก็ไม่รู้จะทำ Rendezvous ไปทำไม ดังนั้นเวลาเราอธิบายเราก็จะต้องอธิบายเรื่อง Rendezvous กันก่อน ว่าการให้ยานอวกาศสองลำมาเจอกันในวงโคจรนั้นยากแค่ไหน
ฟิสิกส์ของการทำ Rendezvous
ให้นึกภาพว่าเราจะต้องนัดเจอกับเพื่อนบนโลก เราจะต้องบอกเพื่อนอย่างไรให้เราได้เจอกัน อย่างแรกก็คือต้องบอกสถานที่ อย่างที่สองก็คือเวลา เรื่องเวลานั้นง่ายมาก เพราะถ้าเรามีมาตรฐานเวลาที่ตรงกันเราก็จะบอกได้ว่าจะให้มาเจอกันกี่โมง ส่วนสถานที่นั้นอาจจะซับซ้อนขึ้นมาหน่อย เพราะมีวิธีการบอกหลายแบบ เช่น บอกจากจุดอ้างอิง เช่น มาเจอกันที่บ้านของเรา หรือเพื่อน ซึ่งถ้าเราและเพื่อนรู้จักสถานที่ดังกล่าวร่วมกันเราก็จะมาเจอกันได้ถูกที่และถูกเวลา หรืออาจจะบอกจากพิกัดทางภูมิศาสตร์ ซึ่งเป็นสิ่งที่สมมติขึ้น เช่น มาเจอกันที่ ละติจูด 13 องศา 76 ลิบดาเหนือ ลองติจูด 100 องศา 53 ลิบดาตะวันออก เราก็จะรู้ว่าต้องมาเจอกันที่อนุเสารีย์ชัยสมรภูมิ ดังนั้น หัวใจสำคัญของการ “นัดพบ” กันนั่นก็คือ “สถานที่ (Where) และเวลา (When)” นั่นเอง
แต่การนัดเจอกันในอวกาศ มันไม่ได้ง่ายขนาดนั้นเพราะว่าอย่างแรก วัตถุต่าง ๆ ในอวกาศล้วนกำลังเคลื่อนที่เนื่องจากมันจะต้องกำลังโคจรรอบอะไรซักอย่างอยู่ เช่น โลก โคจรรอบดวงอาทิตย์ ดวงอาทิตย์โคจรรอบดวงจันทร์ ยานอวกาศกำลังโคจรรอบโลก การเคลื่อนที่นั้นแปลว่าหากเรามองจากมุมใดมุมหนึ่ง เราจะเห็นวัตถุนั้นมีอัตราเร็วของมัน เราเรียกสิ่งนี้ว่า “อัตราเร็วสัมพัทธ์ หรือ Relative Velocity” ซึ่งยิ่งมากแค่ไหน แปลว่าวัตถุนั้นกำลังเดินทางเข้าใกล้หรือห่างออกไปจากเราเร็วขึ้นเท่านั้น แต่ถ้าเป็น Relative Velocity เป็น 0 แปลได้สองอย่างว่า วัตถุนั้นไม่ได้เคลื่อนที่จากมุมมองของเรา หรือวัตถุนั้นกับเรากำลังเคลื่อนที่ไปพร้อม ๆ กันหากมองจากมุมมองของบุคคลที่สาม
สิ่งนี้แปลว่าหัวใจของการทำ Rendezvous ในวงโคจร มันคือการทำให้ Relative Velocity ที่แตกต่างกันมหาศาล จากอะไรก็แล้วแต่ กลายมาเป็น 0 ให้ได้นั่นเอง
ซึ่งวัตถุใด ๆ ในวงโคจรนั้นก็จะอยู่ภายใต้กฎการโคจร หรือที่เราชอบเรียกกันว่ากฎของเคปเลอร์ ที่ยิ่งวัตถุนั้นโคจรอยู่ใกล้คาบการโคจรก็จะเร็วขึ้น แต่ถ้ายิ่งอยู่ห่างออกไปวัตถุนั้นก็จะมีคาบการโคจรช้าลง เป็นเหมือนตัวเลขที่ถูก Fix เอาไว้อยู่แล้ว เช่น สถานีอวกาศนานาชาติ โคจรอยู่ที่ระดับความสูง 400 กิโลเมตรเหนือพื้นโลก มันจะโคจรที่อัตราเร็ว 7,190 เมตรต่อวินาที (ในกรณีนี้เราจะอธิบายแบบง่าย ๆ ไม่พูดถึงหากวัตถุนั้นมีมวลมากพอที่จะกระทบต่อวงโคจรของโลก หรือพูดง่าย ๆ คือโลกไม่ได้ขยับนั่นเอง – แนะนำให้อ่านเรื่อง Barycenter )

ถ้าเราต้องการส่งยานขึ้นไป Rendezvous กับสถานีอวกาศนานาชาติ แปลว่าเราจะต้องทำให้ความเร็วของยานอวกาศของเราจากอัตราเร็วเป็น 0 บนโลก หรือจากอัตราเร็วในวงโคจรใด ๆ ก็แล้วแต่ ไปโคจรที่อัตราเร็วเท่ากับสถานีฯ และต้องไปอยู่ในจุดที่สถานีฯ อยู่พอดิบพอดี ซึ่งจะทำให้ Relative Velocity ระหว่างตัวยาน กับสถานีฯ กลายเป็น 0 เมตรต่อวินาที และ Relative Velocity ระหว่างตัวยานกับพื้นโลกเป็น 7,190 เมตรต่อวินาทีนั่นเอง
เทคนิคต่าง ๆ ในการปรับวงโคจรเพื่อให้วงโคจรมานาบกันสนิทนั้น ก็อย่างเช่น การทำ Hohmann Transfer ซึ่งในบทความนี้เราอาจจะไม่ได้อธิบาย เพราะเดี๋ยวจะยาวเกิน แต่จะอธิบายเชิง Concept ไว้ว่า ยานอวกาศจำเป็นต้องมีการจุดเครื่องยนต์เพื่อปรับความเร็วและทิศทางของมัน ไม่ใช่ว่าเราวาง Trajactory ให้มันอย่างเดียวแล้วปล่อยมัน
สรุปความยากของการ Rendezvous ในอวกาศก็คือ ทุกอย่างมันเคลื่อนที่หมด เราต้องหาวิธีในการบอกว่า “เราอยู่ที่ไหน” และ “วัตถุที่เราจะไปหาอยู่ที่ไหน” ซึ่งเราก็ต้องเข้าใจฟิสิกส์ของวงโคจร พวกค่า Parameter ต่าง ๆ ไม่ว่าจะเป็น รัสมีจากโลก (Radius), ความชันของการโคจร (Inclination), ความเร็วสัมพันธ์ (Relative Velocity)
การทำ Approach รูปแบบต่าง ๆ
ถ้าการทำ Rendezvous เหมือนกับการขับเครื่องบินเข้าสู่เมืองปลายทางจนมองเห็นสนามบินที่เรากำลังจะลงจอด การทำ Approach ก็เหมือนกับการเตรียมร่อนลงจอด ณ สนามบินปลายทาง (ซึ่งในภาษาการบินก็เรียกว่า Final Approch เหมือนกัน) ในการทำ Approch กับวัตถุที่เป็นเป้าหมายของเรานั้นมีแนวคิดอยู่ดังนี้
- v-bar (v̄) Approach คือการที่เราวิ่งเข้าหาเป้าหมายแบบตามหลัง ในแนวเดียวกับวัตถุเป้าหมาย
- r-bar (r̄) Approach คือการที่เราเข้าหาเป้าหมายในแนวดิ่ง จากด้านบน หรือจากด้านล่าง วัตถุเป้าหมาย
- z-bar (z̄) Approach คือการที่เราเข้าหาเป้าหมายในลักษณะตีข้างเข้ามา
ซึ่งความแตกต่างมันไม่ใช่แค่ว่าวิ่งเข้าข้างหน้า หรือเข้าข้างบนเท่านั้น แต่ท่าพวกนี้มันเกิดขึ้นจากการออกแบบการ Transfer วงโคจรเข้ามา หรือที่เราเรียกว่า Phasing Orbit ซึ่งเรื่องนี้ถ้าใครสนใจจริง ๆ แนะนำให้อ่าน Space Rendezvous and Docking ซึ่งเป็นการสอน Simulate การ Rendezvous ใน MATLAB ประกอบ หรือถ้าใครที่ไม่ได้เป็นสายฮาร์ดคอร์ขนาดนั้นก็ไปเล่น Kerbal Space Program
ในภาพล่างนี้คือตัวอย่างการทำ Approch ด้วยวิธีแบบ R-Bar ซึ่ง R นั้นก็คือ Radius เป็นการเข้าหาผ่านทางแกนในแนวดิ่ง โดยตามฟิสิกส์วงโคจรแล้วหากเราไม่ยิง Thruster คาบการโคจรจะช้าลง เพราะมันคือการกระโดนเข้าไปอยู่ในวงโคจรที่สูงขึ้น
โดยส่วนมากการทำ Approch สถานีอวกาศนานาชาติจะเป็นการทำ R-bar Approach แล้วค่อนใช้ Thruster ของยานอวกาศค่อย ๆ ลด Relative Velocity ให้เหลือ 0 ณ จุดที่เราเรียกว่า Checkpoint ซึ่งก็จะอยู่ที่ความห่างระยะต่าง ๆ จากตัวสถานี ก่อนที่จะค่อย ๆ ทำ Final Approch เพื่อเดินหน้าเข้าเชื่อมต่อกับสถานีฯ (หรือบางครั้งอาจจะมีการทำ Fly Around หรือบินวนรอบสถานีก่อน)
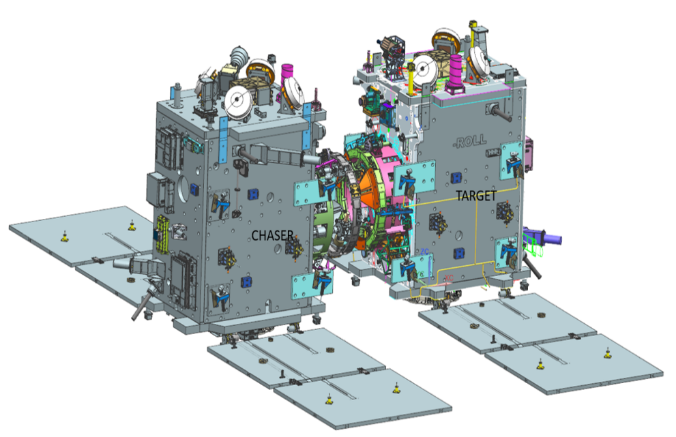
ส่วนภารกิจ SpaDeX ที่เรากำลังจะเจาะลึกกันต่อไปหลังปูพื้นฐานนั้นจะเป็นการทำ Approch แบบ V-bar Approach คือตัวยาน SDX-01 จะทำหน้าที่เป็น Chaser ในขณะที่ SDX-02 จะทำหน้าที่เป็น Targer โดย SDX-01 นั้นจะวิ่งตามหลัง SDX-02 ในวงโคจรและตัว SDX-01 จะค่อย ๆ ใช้ Thruster ค่อย ๆ ปรับความเร็วในการโคจรและลด ระยะห่างกับ Relative Velocity ไปเรื่อย ๆ
โปรไฟล์ภารกิจของ SPADEX และการทดสอบ
ทีนี้ย้อนกลับมาเล่าเรื่อง SpaDeX กันต่อ SpaDeX นั้นเดินทางขึ้นสู่อวกาศกับจรวด PSLV ในวันที่ 30 ธันวาคม 2024 จากฐานปล่อยใน Satish Dhawan Space Centre โดยตัวจรวดได้พายาน SpaDeX ทั้งสองลำเดินทางไปที่วงโคจร 470 กิโลเมตร มีความชันของการโคจรหรือ Inclination อยู่ที่ 55° (สถานีอวกาศนานาชาติมี Inclination อยู่ที่ 51.6°) โดยตัวยานทั้งสองได้แยกตัวออกจากจรวดในนาทีที่ 15 หลังจากการปล่อย
ข้อมูลที่เราจะเล่าต่อจากนี้นั้นจะอ้างอิงจาก เว็บไซต์ SpaDeX Mission ของ ISRO


ในการวางตัวยานอวกาศใน Payload Fairing ของ PSLV นั้นจะเป็นการวางไว้ข้าง ๆ กัน ไม่ได้วางซ้อนกัน และวางไว้บน จรวดท่อนที่ 4 หรือ PS-4 ซึ่งเป็นแฟลตฟอร์มการทดลอง POEM-4 ที่ข้างในมีการติดตั้งการทดลองต่าง ๆ เข้าไป รวมถึงมีระบบสื่อสารกับโลกด้วย ทำให้การปล่อยภารกิจ SpaDeX นั้นไม่ใช่แค่การปล่อยยานอวกาศแค่ 2 ลำ แต่เป็นการใช้งานจรวดท่อนที่ 4 อย่างคุ้มค่าด้วย
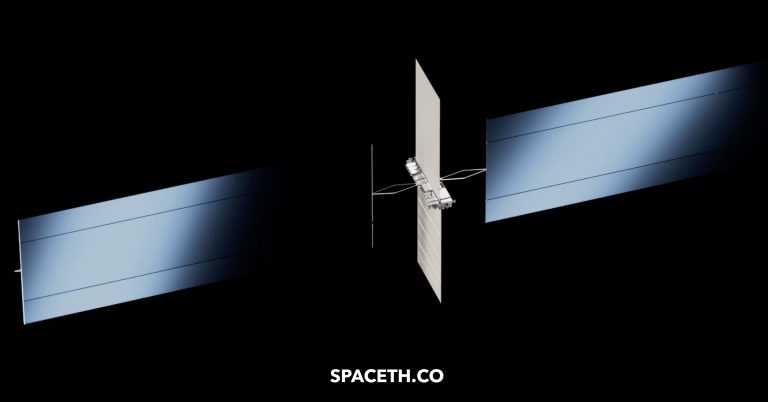
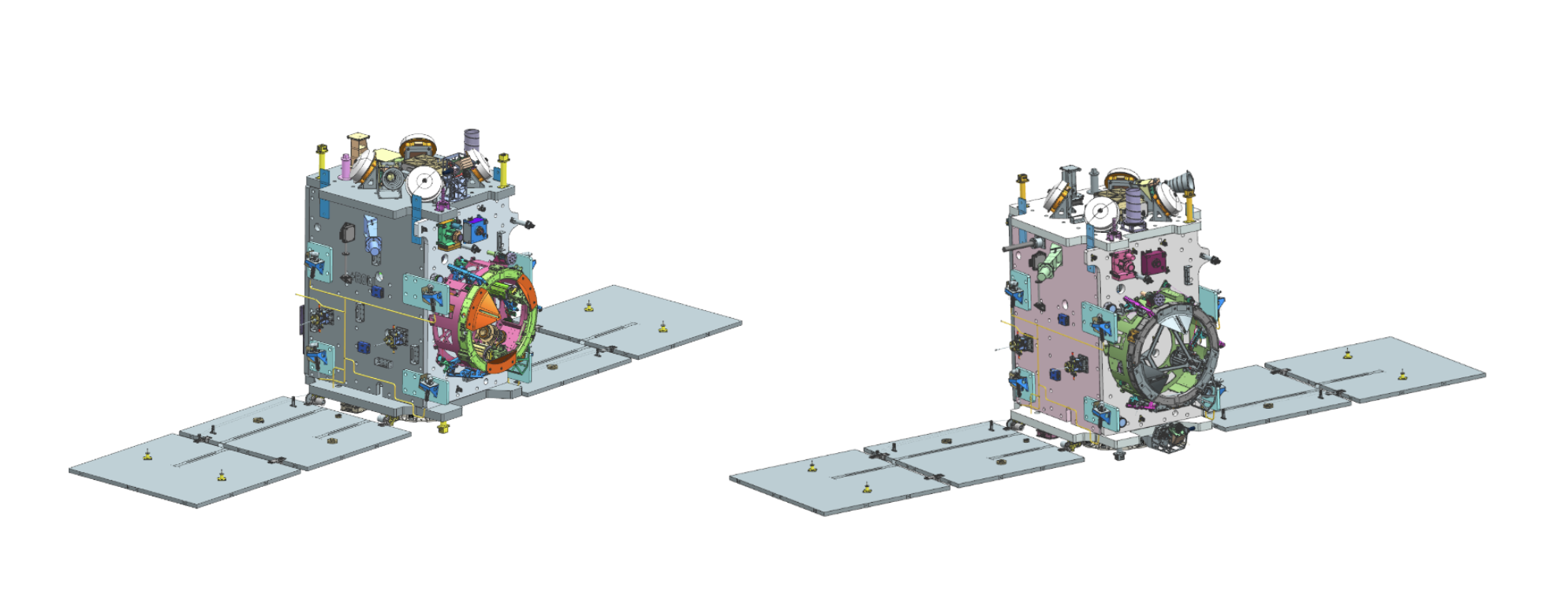
SpaDeX ทั้งสองลำนั้นหนักประมาณ 220 กิโลกรัม พัฒนาขึ้นมาจาก Bus ดาวเทียมที่อินเดียพัฒนาขึ้นเองภายใต้โครงการ Indian Mini Satellite Bus หรือ IMS ตัวยานใช้พลังงานจากแผง Solar Array ตามปกติ ระบบควบคุมยานหรือ Attitude and Orbit Control System (AOCS) นั้นจะประกอบด้วย Star Tracker, Sun Sensor และ Magnetometer การควบคุมทิศทางการเคลื่อนที่แหละการหันของตัวยานนั้น จะทำงานด้วย Reaction Wheels, Magnetic Torquers Bar และมี Thruster สำหรับปรับทิศทางการเคลื่อนที่
หลังจากที่ SDX-01 และ SDX-02 แยกตัวออกจากจรวดแล้ว ตัวยานทั้งสองจะมี Relative Velocity ต่อกันพอสมควร ทำให้เมื่อปล่อยให้เวลาผ่านไป ตัวยานจะอยู่ห่างกันที่ระยะประมาณ 20 กิโลเมตร เราเรียกว่า Drift Arrest Maneuver หลังจากนั้นตัวยานทั้งสองจะปรับวงโคจรให้มีวงโคจรแบบเดียวกันเสมอกันทับกันสนิท (แต่ SDX-01 และ SDX-02 อยู่ห่างกัน 20 กิโลเมตร) เราเรียกวงโคจรนี้ว่า Far Rendezvous
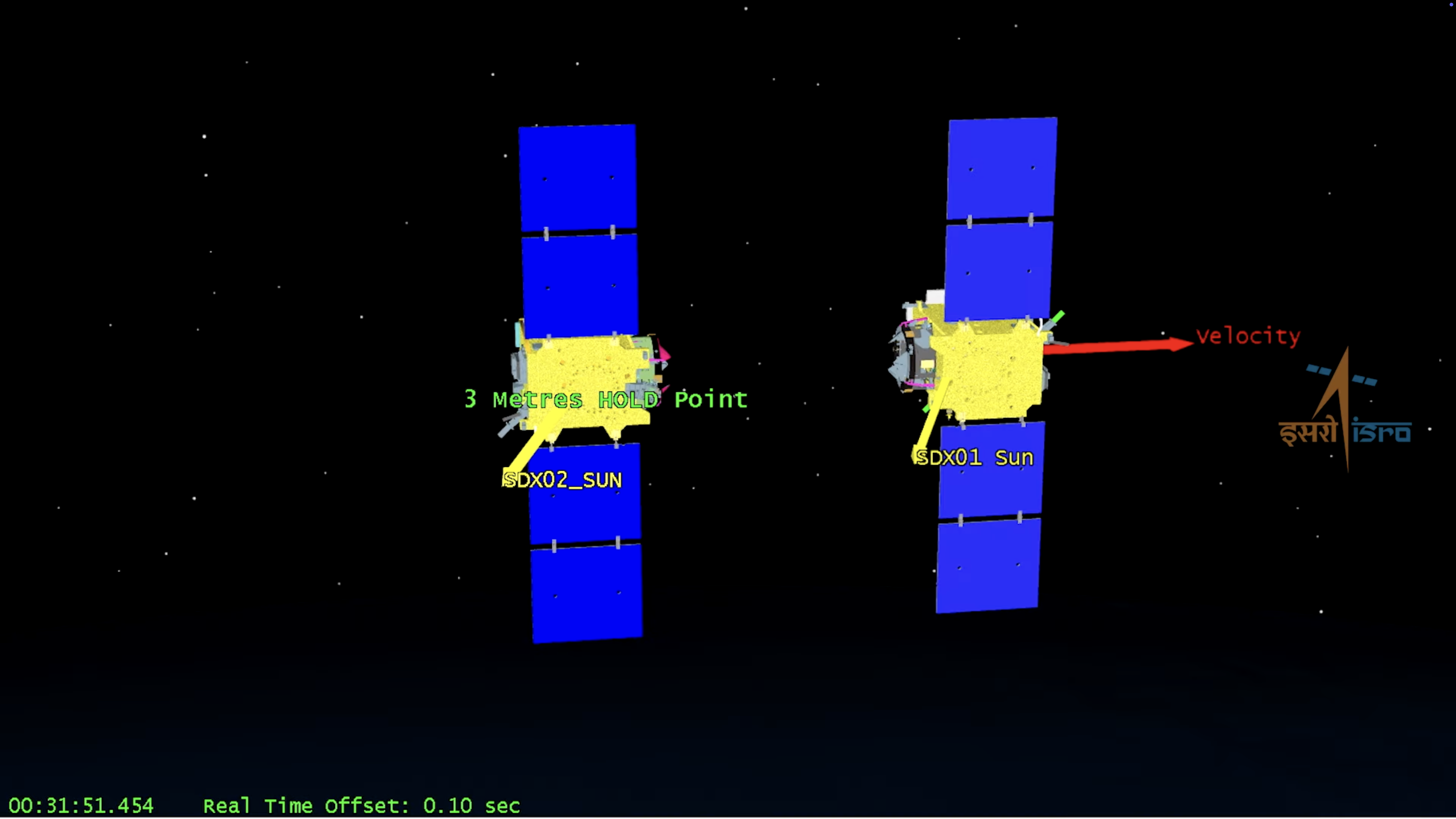
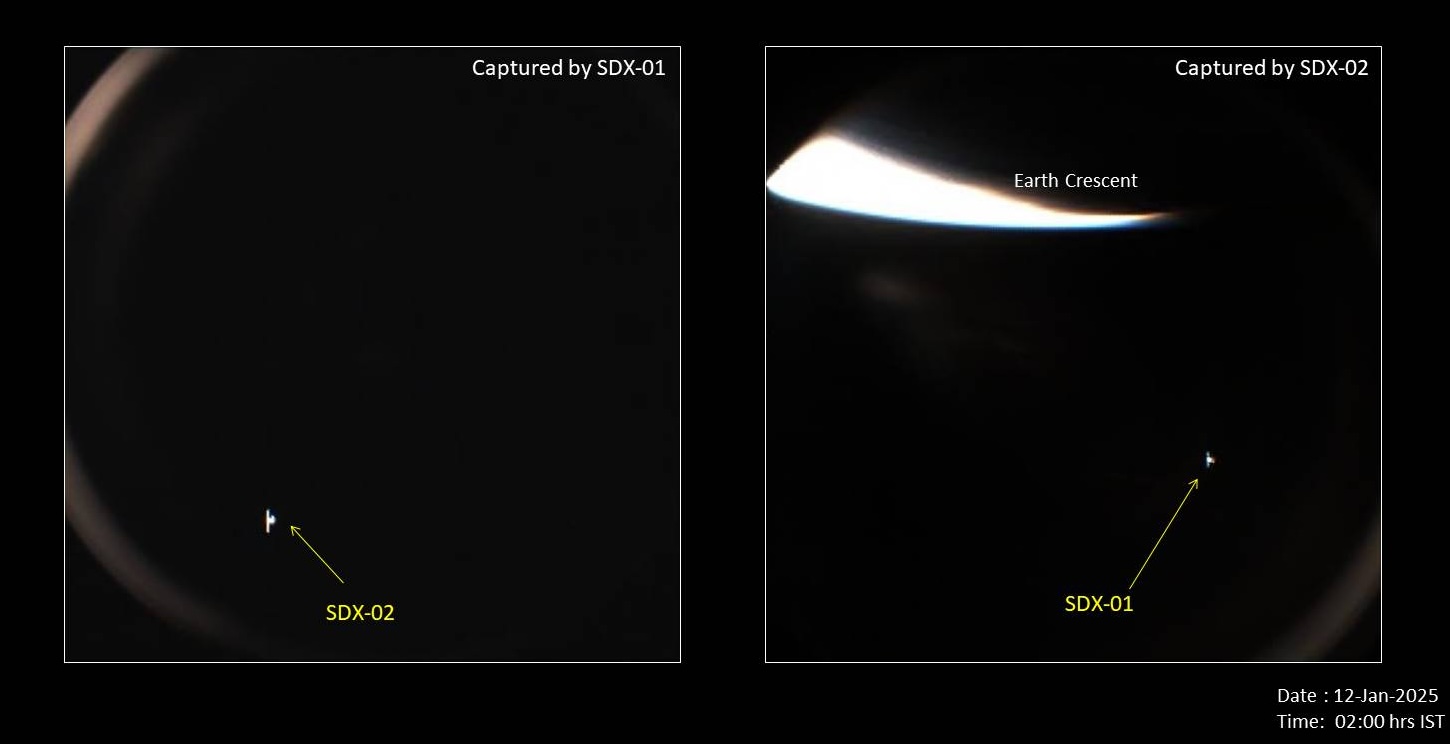
หลังจากนั้น ISRO จะบังคับให้ตัวยาน SDX-01 พยายามเข้าใกล้ตัว SDX-02 ที่ระยะต่าง ๆ ได้แก่ 5 กิโลเมตร 1.5 กิโลเมตร 500 เมตร 225 เมตร 15 เมตร และ 3 เมตร ซึ่งเป็นระยะที่ใกล้ที่สุด และในช่วงเช้าของวันที่ 12 มกราคม 2025 ตัวยาน SDX-01 และ SDX-02 ก็สามารถเข้าใกล้กันที่ระยะ 3 เมตร ประสบความสำเร็จ แต่ยังไม่มีการทดสอบ Docking ซึ่งกำหนดการณ์นี้ ได้ถูกเลื่อนออกมา เนื่องจากต้องการเผื่อเวลาให้วิศวกรได้ตรวจสอบข้อมูลต่าง ๆ ก่อนเพื่อความมั่นใจ
เทคโนโลยีที่ SpaDeX ใช้ในการหากันให้เจอบนวงโคจร
ในการหาตำแหน่งบนวงโคจรนั้น SpaDeX ก็จะใช้เทคนิคปกติที่ดาวเทียมใช้กันอยู่แล้ว และแน่นอนว่าพอมันยังอยู่บนวงโคจรของโลก เราก็ยังสามารถใช้ระบบระบุตำแหน่งอย่าง GNSS ได้ สิ่งที่น่าสนใจก็คือเมื่อยานเข้าใกล้กันและเตรียมทำ Approch เพื่อ Docking
เทคโนโลยีที่ยาน SpaDeX ใช้ในการวัดระห่างของตัวยานสองลำนั้นได้แก่ Laser Range Finder (LRF) หรืออุปกรณ์ที่ใช้การยิงเลเซอร์ไปกลับเพื่อวัดระยะห่าง และมีการติดตั้งตัว Corner Cube Retro Reflectors ไว้ให้สะท้อนกับเลเซอร์จากตัว Range Finder ซึ่งระบบนี้จะทำงานในขณะที่ตัวยานทั้งสองอยู่ห่างกัน 6,000 – 200 เมตร
เมื่อตัวยานเข้าใกล้กันที่ระยะ 2,000 เมตรเป็นต้นไป จนถึงประมาณ 10 เมตร อุปกรณ์ชุด Rendezvous Sensors จะเริ่มทำงาน ซึ่งนอกจากระยะห่างแล้ว จะบอกตำแหน่งในแนวแกน X, Y และ Z เพื่อพาให้ตัวยานอยู่ในแกนที่ถูกต้องและค่อย ๆ เคลื่อนที่เข้าหากัน และสุดท้ายเมื่อตัวยานเข้าใกล้กันที่ระยะประมาณ 30 เมตรจนถึง 40 เซนติเมตร ตัว Proximity and Docking Sensor (PDS) จะเริ่มทำงาน เป็นชุดเซนเซอร์ที่ละเอียดที่สุดที่จะพาให้ Docking Machanism ของยานนั้น Dock กันอย่างนุ่มนวลที่สุด โดยเราจะสังเกตว่าเทคโนโลยีการ Docking นั้นจะเป็นการใช้ Optic เป็นหลัก
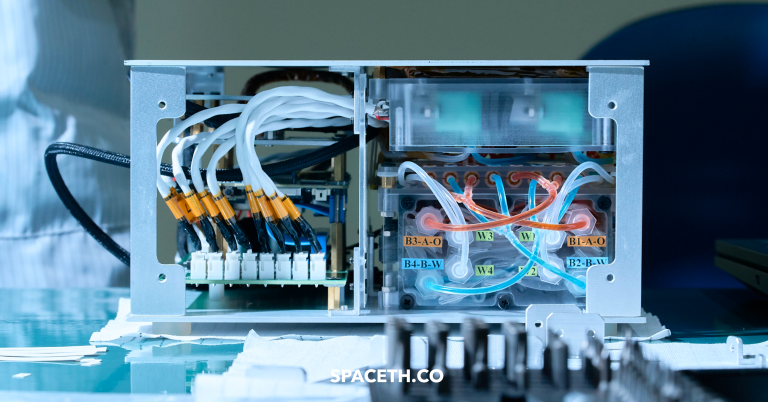
ในการทดสอบ Docking นั้น ISRO จะใช้โอกาสนี้ในการทดสอบการถ่ายโอนไฟฟ้าระหว่างยานทั้งสอง ผ่าน Interface ที่ ISRO พัฒนาขึ้นมา (ซึ่งเราจะพูดถึงกันในหัวข้อถัดไป) จากนั้นยานทั้งสองจะแยกตัวออกจากกัน และต่างคนก็จะต่างไปเป็น Platform การทดลองตาม Payload ทางวิทยาศาสตร์ที่ได้รับการติดตั้งมา (อย่างที่บอกว่า ISRO นั้นใช้ยานอวกาศได้คุ้มค่าจริง ๆ)
Docking Mechanism ที่ ISRO พัฒนาขึ้นมา
ในอดีตมาตรฐานของการ Docking นั้นต่างคนต่างทำ แค่ในอเมริกาเปลี่ยนยุค เปลี่ยนยานอวกาศ ก็มีมาตรฐาน Docking Mechenism ใหม่แล้ว เช่นในยุค Apollo มาตรฐานที่ใช้ในการ Dock ระหว่าง Lunar Module กับ Command Module ก็แตกต่างจากการ Dock ในยุค Gemini หรือแม้กระทั่งบนสถานีอวกาศนานาชาติก็มีมาตรฐานหลายตัวเช่นกัน ในตอนแรก เราใช้มาตรฐานแบบ Androgynous Peripheral Attach System หรือ APAS-95 ก่อนที่จะมีการปรับเปลี่ยนมาเป็นมาตรฐาน IDSS หรือ International Docking System Standard
คำว่า Androgynous นั้นหมายความว่าสองฝั่งเหมือนกัน เป็นแนวคิดการออกแบบ Docking Mechanism ที่ไม่มี Male Connector และ Female Connector ก็คือสามารถจับอะไรมา Dock กันก็จะเข้ากันได้
Mechanism ที่ ISRO ใช้กับ SpaDeX นั้นก็จะเป็นแบบ Androgynous มีปรัชญาการออกแบบที่ใกล้เคียงกับ IDSS เหมือนเอา IDSS มาย่อส่วน โดย IDSS นั้นจะมีเส้นผ่านศูนย์กลาง 80 เซนติเมตร ในขณะที่ของ SpaDeX นั้นมีเส้นผ่านศูนย์กลางแค่ 45 เซนติเมตร มีค่า Degree of Freedom (ยอมให้ไม่ตรงได้) อยู่ที่ 1 องศา เป็น Mechanism แบบ Soft Capture คือจะมีวงแหวนยื่นออกมารับก่อน (เรียกว่า Soft Capture) และค่อย ๆ ดึงเข้าหากันจนสวมเข้ากันสนิท (Hard Capture)
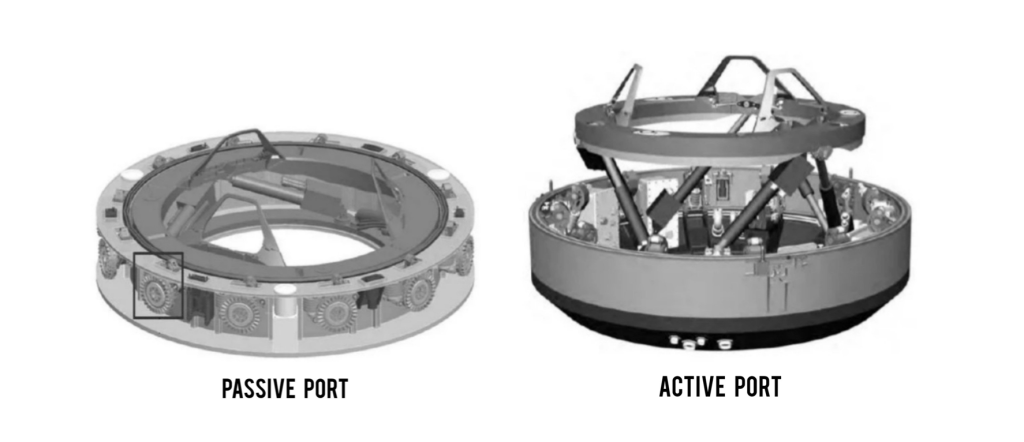
แม้ว่าจะเป็น Androgynous แต่หน้าตาของ Docking Mechanism นั้นก็จะแบ่งเป็นฝั่ง Passive และ Active โดยตามหลักการแล้ว พวกยานอวกาศจะใช้ Port แบบ Active ในภารกิจ SpaDeX นี้ตัว SDX-01 จะใช้ Active Port
ความรู้จากการทำ Docking Mechanism ตัวนี้จะนำอินเดียไปสู่การสร้าง Bhartiya Docking System (BDS) ที่อินเดียจะใช้สำหรับยานอวกาศ Gaganyaan และสถานีอวกาศ Bharatiya Antariksha Station ของตัวเองด้วย โดยขนาดของ BDS นั้นก็จะอยู่ที่ 80 เซนติเมตรเทียบเท่ากับ IDSS
อนาคตของภารกิจที่จำเป็นต้องเชื่อมต่อยานกันในอวกาศ
ปัจจุบันอินเดียอยู่ระหว่างการพัฒนายานอวกาศคนนั่ง Gaganyaan ของตัวเอง รวมถึงมีแผนในการสร้าง Bharatiya Antariksha Station ซึ่งเป็นสถานีอวกาศรอบโลกของอินเดีย มีแผนส่งโมดูลแรกขึ้นสู่วงโคจรในปี 2028 ดังนั้นการพัฒนาเทคโนโลยี Docking ของอินเดียจึงสำคัญมาก ๆ เพราะแน่นอนว่าการสร้างสถานีอวกาศจำเป็นจะต้องส่งโมดูลขึ้นไปประกอบกันบนวงโคจร และการส่งยานอวกาศขึ้นไปเทียบก็จำเป็นต้องมี Docking Mechanism ไว้รองรับ
น่าสนใจอย่างหนึ่งก็คือ เรายังไม่มีข้อมูลแน่ชัดว่าทำจริง ๆ แล้ว มาตรฐาน Bhartiya Docking System นี้จะเหมือนหรือแตกต่าง หรือรวมถึงใช้งานร่วมกับ International Docking System Standard ได้หรือไม่ (และจริง ๆ ข้อนี้อยู่ใน Artemis Accords ด้วยว่าชาติที่ร่วมเซ็นต้องพยายามทำตามมาตรฐานทางวิศวกรรมต่าง ๆ ซึ่งการพูดกว้าง ๆ นี้ก็อาจนับรวมถึง Docking Mechanism ด้วย) ซึ่งมาตรฐาน IDSS ก็จะสำคัญมาก ๆ สำหรับโครงการอย่าง Lunar Gateway แปลว่าถ้าอินเดียจะทำ Module กับ Lunar Gateway (ซึ่งปัจจุบันยังไม่มีแผน) อินเดียก็จะต้องทำ IDSS หรือถ้าจะเอา Gaganyaan ไปเชื่อมกับสถานีอวกาศชาวบ้าน ก็น่าจะต้องใช้มาตรฐาน IDSS ด้วย
เรียบเรียงโดย ทีมงาน Spaceth.co