Ingenuity ไม่ได้ถูกส่งไปเพื่อสาธิตทางเทคโนโลยีเพื่อทดสอบว่าการบินบนดาวอังคารเป็นไปได้หรือไม่อย่างเดียว แต่มันถูกออกแบบมาให้วัดประสิทธิภาพการบินบนดาวอังคารเทียบกับการบินบนโลกด้วย เพื่อที่ว่าในอนาคตหากมนุษย์เปลี่ยนผ่านจากการสำรวจดาวเคราะห์ด้วยโรเวอร์ไปยังการสำรวจด้วยอากาศยาน เราจะสามารถออกแบบอากาศยานที่เหมาะสมกับการบินบนดาวอังคารได้นั่นเอง
Ingenuity ถูกสร้างขึ้นมาท่ามกลางความไม่รู้
ก่อนปี 2021 มนุษย์ไม่เคยส่งอากาศยานชนิดใด ๆ ออกจากวงโคจรโลกแม้แต่ลำเดียว เราไม่มีความรู้ไม่มีประสบการณ์แม้แต่น้อยว่าอากาศยานทำตัวยังไงเมื่อมันต้องบินอยู่ในชั้นบรรยากาศที่เบาบางถึงประมาณ 1 ใน 100 ของชั้นบรรยากาศโลก อย่างชั้นบรรยากาศของดาวอังคาร ซึ่งจริง ๆ แล้วมีชั้นบรรยากาศอยู่น้อยกว่า 1% ของโลกด้วยซ้ำ
สิ่งที่เราทำได้มากที่สุดคือการทดสอบอากาศยานดังกล่าวในห้องส^ญญาอากาศที่ถึงจะสามารถจำลองอากาศที่เบาบางลงได้ แต่ก็ไม่สามารถจำลองปัจจัยอื่น ๆ ที่อาจมีผลเมื่ออยู่ในสถานการณ์จริงได้ เช่น ลม อัตราส่วนแก๊ส และฝุ่น
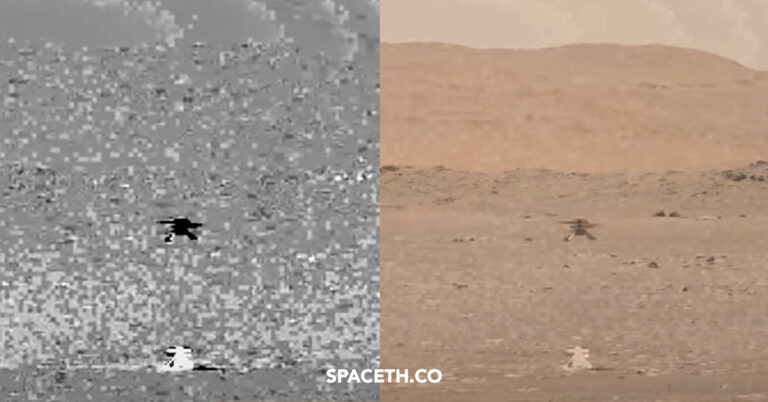
ครั้งที่พี่น้องตระกูลไรต์ติดปีกให้กับมนุษยชาติด้วยการสร้างเครื่องบินที่บินได้ลำแรกของโลกขึ้น หรือ ครั้งที่ Igor Sikorsky ปฏิวัตินิยามของอากาศยานจากสิ่งประดิษฐ์ที่สามารถเลียนแบบนกได้สู่ยานพาหนะที่สามารถบินขึ้นลงในแนวดิ่งได้ซึ่งปัจจุบันรู้จักกันในชื่อ “เฮลิคอปเตอร์” พวกเขาต่างก็ไม่เคยเห็นสิ่งประดิษฐ์ของใครบินได้มาก่อน และสร้างมันขึ้นมาเพื่อให้เขารู้ในสิ่งที่ไม่รู้ ปัจจุบันเรามีอากาศยานลำแรกบนดาวดวงอื่นที่ไม่ใช่โลก ชื่อว่า “Ingenuity” และมันก็มาจากความไม่รู้เช่นกัน
Ingenuity เป็นเฮลิคอปเตอร์ชนิดที่อาศัยการ Pre-plan Flight หรือวางแผนการบินก่อนที่การบินจะเกิดขึ้นจริง เนื่องจากดีเลย์ในการสื่อสารระหว่างโลกกับดาวอังคารที่อาจมากถึงหลาย 10 นาที ทำให้มนุษย์ไม่สามารถควบคุมเฮลิคอปเตอร์แบบ Real-time ได้ เพราะฉะนั้นเมื่อการบินของจริงเริ่มขึ้น Ingenuity จะกลายเป็นเฮลิคอปเตอร์แบบ Fully Autonomous ทันที
อากาศพลศาสตร์ของเฮลิคอปเตอร์
ถึง Ingenuity จะมีขนาดเล็กจนไม่น่าเรียกว่าเฮลิคอปเตอร์แต่เป็นโดรนมากกว่า แต่มันมีจุดแตกต่างอย่างหนึ่งที่ทำให้มันถูกเรียกว่าเฮลิคอปเตอร์ คือ Control Surface หรือใบพัดนั่นเอง
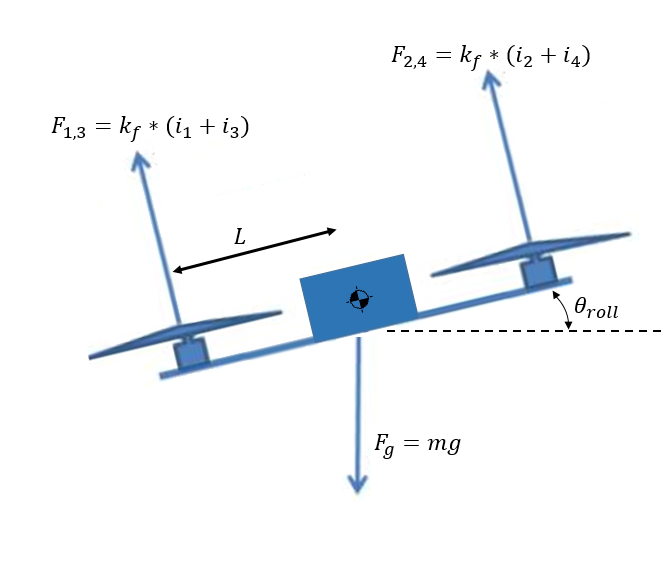
โดรนทั่ว ๆ ไปที่เราเอามาบินกันบนโลกอย่างพวก Quadcopter อาศัยการควบคุมด้วยการเปลี่ยนแปลงในรอบหมุน (RPM) ของใบพัด สมมุติโดรน 4 ใบพัดจะเพิ่มความสูงมันก็จะเร่งใบพัดของมันให้หมุนเร็วขึ้นเพื่อให้ใบพัดสร้างแรงยกได้มากขึ้น เมื่อมันจะเดินหน้ามันก็จะเพิ่มความเร็วใบพัดคู่หลังและลดความเร็วใบพัดคู่หน้าลงเพื่อสร้างความแตกต่างของแรงยกระหว่างข้างหน้ากับข้างหลัง ซึ่งจะทำให้ตัวโดรนทิ่มหน้าไปด้านหน้าแล้วเคลื่อนที่ไปข้างหน้าตาม F รวมของ Thrust จากใบพัด
โดรนถือเป็นอากาศยานที่ Basic มาก ๆ เพราะ Control Surface ที่ต้องควบคุมมีอย่างเดียว คือ ความเร็วใบพัด แค่นั้นโดรนก็สามารถ Maneuver ตัวมันเองได้ทั้ง 3 แกนแล้ว (Pitch, Yaw, Roll) รวมถึง Altitude Control
แต่การเอาโดรนไปบินบนดาวอังคารมีปัญหาอย่างหนึ่ง ชั้นบรรยากาศของดาวอังคารเบาบางมาก ความหนาแน่นของอากาศเพียงแค่ 1 ใน 100 ของโลก (0.0060 ATM) การที่เราเอาโดรนที่บินได้บนโลกไปบินดาวอังคารจะหมายถึงแรงยกที่น้อยลง 100 เท่า และหากต้องการทดแทนแรงยกที่หายไป โดรนจะต้องเร่งความเร็วการหมุนหรืออัตราการหมุน (RPM) ของใบพัดเพิ่มแบบสุดขีดเพื่อสร้างแรงยกทดแทนส่วนที่หายไป และนี่ก็คือปัญหา
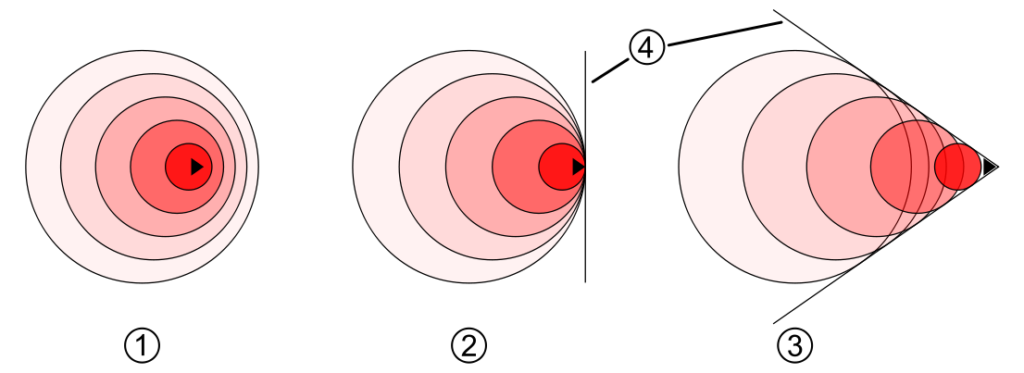
เมื่อใบพัดหมุนเร็วจนถึงจุดหนึ่ง มันจะเข้าใกล้ความเร็วเสียงขึ้นเรื่อย ๆ จนทะลุ Sound Barrier และเคลื่อนที่ด้วยความเร็วเสียง ใบพัดที่เคลื่อนที่ด้วยความเร็วเสียงจะเกิดคลื่นกระแทก (Shockwave) อย่างรุนแรงที่ทำให้ประสิทธิภาพของใบพัดนั้นลดลงอย่างมีนัยสำคัญ นอกจากนี้ใบพัดจะยังไม่สามารถเคลื่อนที่เร็วกว่านี้ได้เนื่องจากแรงต้านจากการอัดอากาศ จึงทำให้ความเร็วเสียงเป็นเหมือนความเร็วใบพัดสูงสุดที่มันทำได้
ใบพัดของโดรนบนโลกมีอัตราการหมุนเฉลี่ยประมาณ 8,000 RPM (รอบต่อนาที) ถ้าจะเอาโดรนแบบเดียวกันไปบินที่ความหนาแน่นชั้นบรรยากาศ 1 ใน 100 ของโลกด้วยแรงยกเท่ากัน ใบพัดจะต้องหมุนถึง 80,000 RPM ไม่ต้องคำนวณก็รู้ได้เลยว่าเร็วกว่าความเร็วเสียงโคตร ๆ
แต่ ใบพัดของเฮลิคอปเตอร์ขนาดใหญ่ที่ให้คนโดยสารบนโลกนั้นกลับมีอัตราการหมุนองใบพัดแค่ประมาณ 500 RPM เท่านั้น มันทำได้ยังไง
หลาย ๆ คนอาจจะไม่รู้ว่าจริง ๆ แล้วเฮลิคอปเตอร์เวลามันจะบินขึ้น มันไม่ได้เร่งความเร็วใบพัดเลยแม้แต่น้อย มันหมุนด้วยอัตราเร็วเกือบเท่าเดิมตลอดเวลาที่ความเร็วใบพัด 100% ของมัน อาจจะมีขาดหรือเกินบางที่ประมาณ 90% ถึง 110% ของอัตราเร็วใบพัดเฉลี่ย ไม่เกินนี้ นึกง่าย ๆ ถ้าเฮลิคอปเตอร์เป็นรถ มันก็เหมือนกับรถที่เหยียบคันเร่งเท้าติดพื้นตลอดเวลาแต่ใส่เกียร์ว่างอยู่
สิ่งที่ทำให้เฮลิคอปเตอร์บินขึ้นได้โดยที่ไม่ต้องเพิ่มอัตราเร็วการหมุนของใบพัด คือ การปรับมุมต้านอากาศ (Angle of Attack: AOA) ของใบพัด ใบพัดของเฮลิคอปเตอร์ก็เหมือนกับปีกของเครื่องบิน (รูปทรงปีกเครื่องบินเรียกว่า Airfoil) เพียงแต่เป็นปีกหมุนได้หลาย ๆ อันประกอบกันเป็นชุดใบพัด
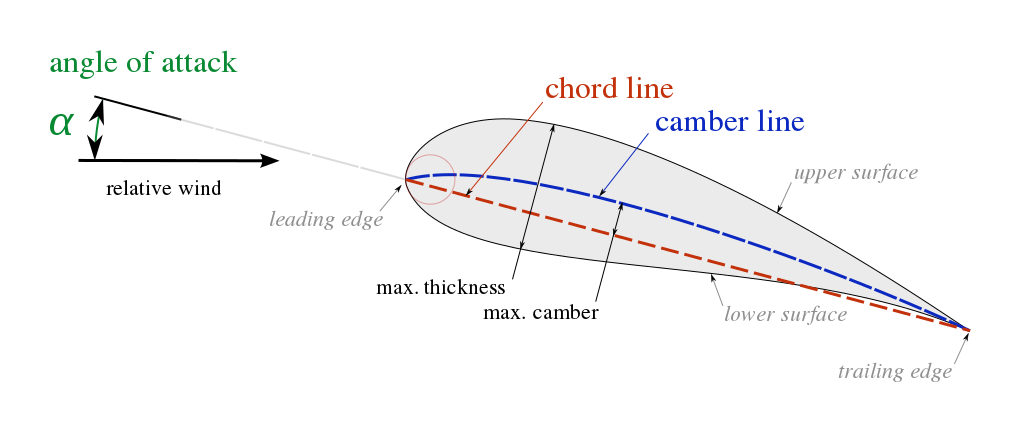
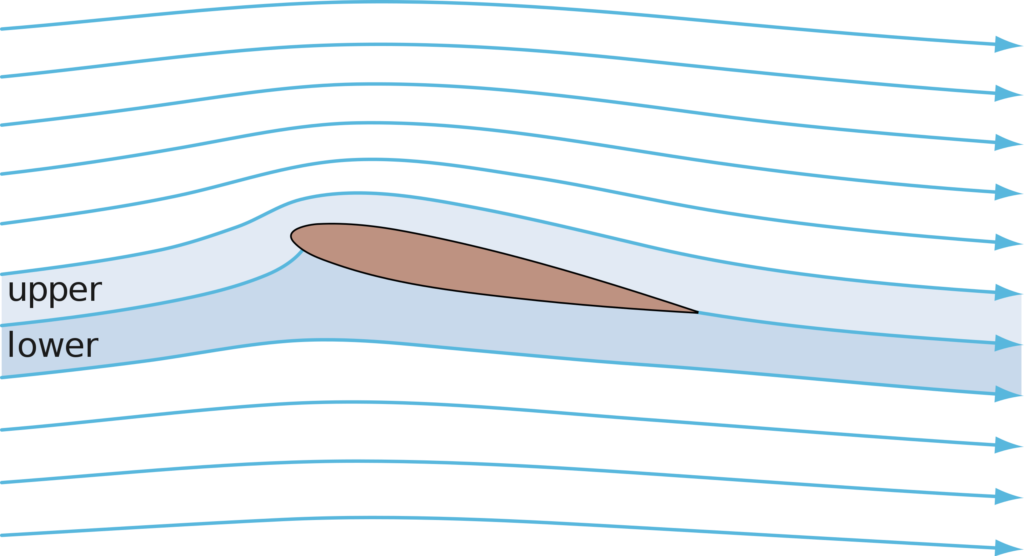
Airfoil ถูกออกแบบมาให้เมื่อมันเคลื่อนตัวผ่านอากาศ กระแสของvkกาศจะเคลื่อนตัวด้วย Coandă Effect ไปตามรูปร่างของปีก ด้วยรูปทรงของ Airfoil กระแสของอากาศเหนือปีกจะถูกแยกออก โดยปีกบนถูกออกแบบมาให้อากาศที่ผ่านมามีความเร็วเพิ่มขึ้น เป็นผลให้ความดันต่ำลงตาม Bernoulli’s Principle* ส่วนปีกล่างถูกออกแบบมาให้อากาศที่ผ่านมีความเร็วลดลง เป็นผลทำให้ความดันเพิ่ม เกิดความแตกต่างระหว่างความดันของปีกล่างกับปีกบน ปีกล่าง ซึ่งปีกล่างมีแรงดันมากกว่าปีกบนจึงดัน Airfoil ขึ้น เกิดเป็นแรงยก
* มีทฤษฎีอื่นที่สนับสนุนการสร้างแรกยกด้วย Airfoil อีกเป็นจำนวนมาก เช่น กฎของนิวตัน Bernoulli’s Principle เป็นแค่ส่วนหนึ่งเท่านั้น
ซึ่งแรงจาก Lift Coefficient หรือค่าสัมประสิทธิ์ของแรงยกในอากาศพลศาสตร์นั้นจะขึ้นอยู่กับ AOA ของปีกที่กระทำกับอากาศ โดยยิ่งมุม AOA มากเท่าไหร่อากาศยิ่งเกิด Pressure Difference มากยิ่งขึ้น ปีกยิ่งสร้างแรงยกได้มากขึ้นแต่ก็เพิ่มแรงต้าน (Drag) ด้วยเช่นกัน
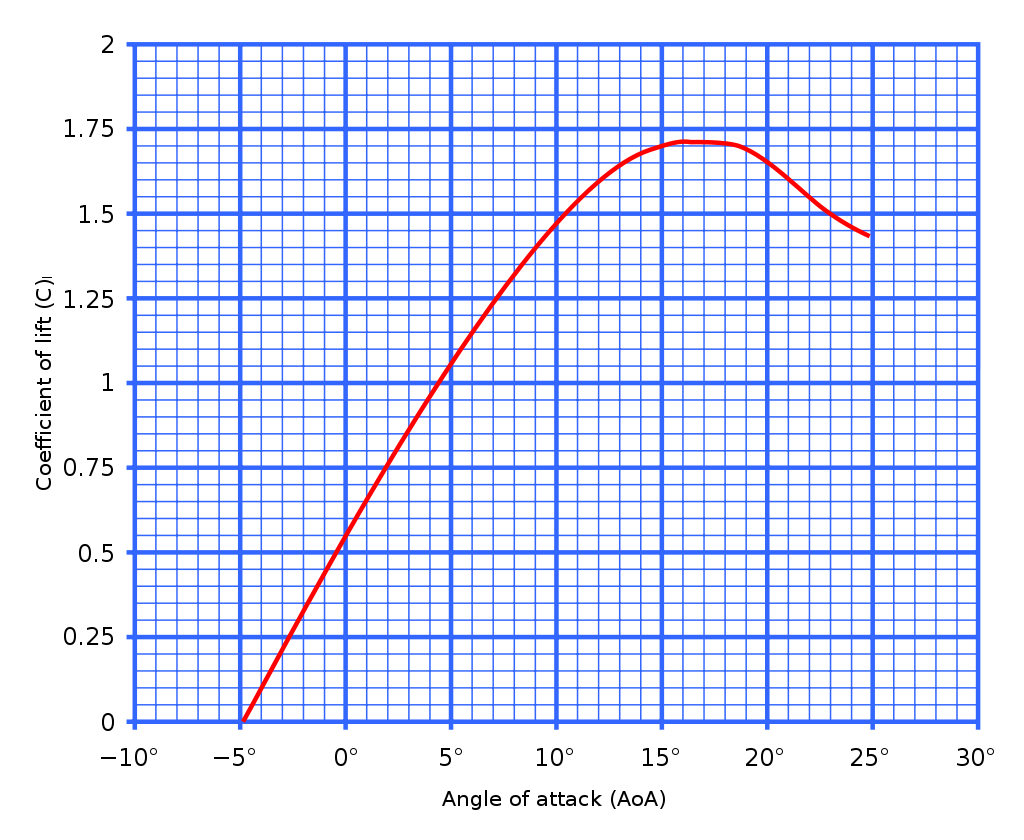
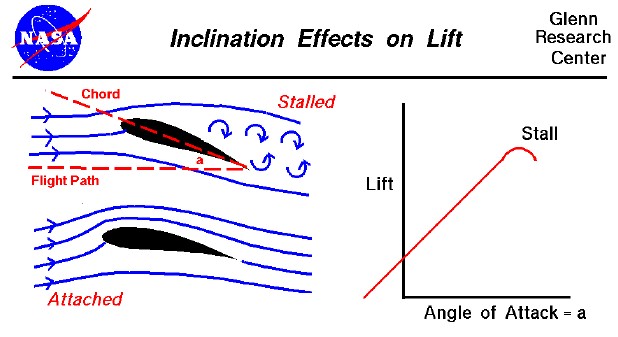
แต่หาก AOA มากเกินไปจะเป็นผลให้เกิด Wing Stall หรือ Aerodynamic Stall เมื่ออากาศกระแทกเข้ากับ Airfoil ด้วย AOA ที่สูงเกินไป เป็นผลให้กระแสของอากาศไม่เดินทางไปตามปีกแต่แยกตัวออกมาจากปีกเกิดเป็น Turbulent Airflow ควบรวมกับแรงต้านอากาศ (Drag) ที่มากขึ้นตามมุม AOA จะลดประสิทธิภาพของปีกอย่างมีนัยสำคัญ

ทำให้มุม AOA มีจุดสมดุลที่แรงยกและ Drag ต่างพอดีกันและไม่ทำให้เกิด Aerodynamic Stall นั่นเอง
ปีกแบบ Airfoil เมื่อนำไปใช้กับเครื่องบิน เครื่องบินจะต้องเร่งความเร็วจนอากาศที่ผ่าน Airfoil เกิด Pressure Difference มากพอและสร้างแรงยกให้กับปีกได้ แต่ในเฮลิคอปเตอร์นั้น Airfoil อยู่ที่ใบพัด และการหมุนใบพัดก็เหมือนกับการแหวกอากาศซึ่งทำให้มีอากาศผ่านตัว Airfoil อยู่แล้วมันจึงสามารถสร้างแรงยกได้ในแนวดิ่ง
แต่เมื่อเราต้องการเพิ่มแรงยก หากเป็นในเครื่องบิน นักบินก็จะเชิดหัวเครื่องบินขึ้นเพื่อให้ปีกมีมุม AOA มากขึ้นและเพิ่มแรงยก แต่ในชุดใบพัดของเฮลิคอปเตอร์นั้นถูกออกแบบมาให้มันสามารถปรับมุม AOA ของใบพัดได้โดยตรงเป็น Control Surface ที่เรียกว่า “Collective” หากนักบินอยากนำเครื่องขึ้นก็ไม่จำเป็นต้องเร่งอัตราเร็วใบพัดแต่แค่ปรับมุม AOA ใบพัดให้มากขึ้นก็จะค่อย ๆ ได้แรงยกเพิ่มขึ้น หรือตอนจะจอดก็ค่อย ๆ ปรับ AOA ให้น้อยลงเรื่อย ๆ จนแตะพื้นแล้วจึงปรับให้ใบพัดขนานกับพื้น ใบพัดก็จะไม่สร้างแรงยก
และหากเฮลิคอปเตอร์จะเคลื่อนที่ไปข้างหน้าถอยหลังหรือซ้ายขวา (Pitch และ Row) จะทำได้ด้วยการใช้ Control Surface ที่เรียกว่า “Cyclic” ในการปรับความเอียงของใบพัดให้เอียงไปด้านใดด้านหนึ่งเพื่อสร้างแรงที่ไม่สมมาตร (Asymmetric Lift) ให้เครื่องเคลื่อนที่ไปด้านใดด้านหนึ่ง
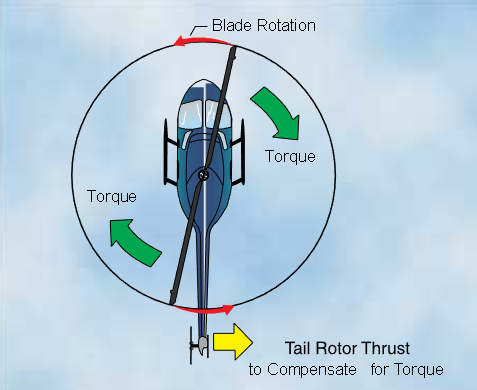
ส่วนการหมุนนั้น (Yaw) เฮลิคอปเตอร์บนโลกจะใช้ใบพัดหลัง (Tail Rotor) ช่วยในการหมุน เนื่องจากใบพัดหลักนั้นสร้างแรง Torque ตรงข้ามกับทิศทางที่ใบพัดหมุนตามกฎข้อที่ 3 ของนิวตัน และนั่นจะทำให้ตัวเฮลิคอปเตอร์หมุนแบบควบคุมไม่ได้ (ถ้าใบพัดหมุนขวา แรง Torque จะไปซ้าย) จึงต้องมี Tail Rotor มาช่วยในการต้านแรง Torque โดยแรงจาก Tail Rotor จะต้องพอดีเป๊ะกับแรง Torque ที่กระทำเฮลิคอปเตอร์เพื่อหักล้างกันและป้องกันไม่ให้เฮลิคอปเตอร์หมุน แต่ถ้าเราอยากหมุนเราก็สามารถลดลงหรือเพิ่มแรงของ Tail Rotor ให้มากกว่าแรง Torque ได้ เพื่อหมุนนั่นเอง
Ingenuity ทำได้ดีแค่ไหนในฐานะเฮลิคอปเตอร์ลำแรกบนดาวอังคาร
อธิบายกันมาขนาดนี้แล้ว Ingenuity ก็คือ เฮลิคอปเตอร์ดี ๆ ลำหนึ่งนี่เองและมันไม่ใช่โดรน Ingenuity มี Control Surface เหมือนเฮลิคอปเตอร์บนโลกทั้งหมดไม่ว่าจะเป็น Collective ที่ควบคุม AOA หรือ Cyclic ที่ควบคุม Pitch และ Roll ส่วน Yaw นั้น เนื่องจาก Ingenuity ไม่มี Tail Rotor แต่มันมีใบพัดสองอันซึ่งหมุนสลับทิศทางกันเพื่อหักล้างแรง Torque จากกันและกัน หากจะ Yaw ก็สามารถปรับความเร็วของใบพัดอันใดอันหนึ่งให้ช้าลงหรือเร็วขึ้นเพื่อสร้างแรง Torque ในการหมุนได้
ด้วยชั้นบรรยากาศที่เบาบางของดาวอังคาร แม้ Ingenuity จะควบคุมแรงยกด้วยระบบ Collective Control ผ่านการปรับ AOA ก็ยังต้องใช้อัตราการหมุนของใบพัดที่สูงถึง 2,537 RPM ในการขึ้นบิน เทียบกับเฮลิคอปเตอร์บนโลกที่ใช้น้อยกว่าหลักพัน แต่ก็ยังถือว่ารับได้เนื่องจากไกลจากความเร็วเสียงมาก ๆ (ใบพัดโดรนบนโลกยังหมุนที่ RPM หลักหมื่นต้น ๆ)
Takeoff
การขึ้นบินของ Ingenuity จะรุนแรงกว่าการบินขึ้นของเฮลิคอปเตอร์พอสมควรด้วยการปรับ AOA ผ่าน Collective Control แบบกะทันหันเพื่อสร้างแรงยกให้ Ingenuity สามารถบินขึ้นได้ทันที ทั้งนี้เพื่อเตรียมการสำหรับปรับ Angular Rate จากอิทธิพลของลม ต่างจากเฮลิคอปเตอร์บนโลกที่จะค่อย ๆ ปรับ AOA แบบนิ่ม ๆ แล้วค่อย ๆ ขึ้น โดยการ Takeoff ของ Ingenuity ใช้เวลาไม่ถึง 1 วินาทีเท่านั้น ใน 1 วินาทีนี้ Flight Control ของ Ingenuity จะถูกจำกัดไว้แค่ Angular Rate (ควบคุมไม่ให้ส่าย) เท่านั้นเพื่อป้องกันไม่ให้มันทำอะไรแปลก ๆ เช่น เอาหน้าจุ่มดิน
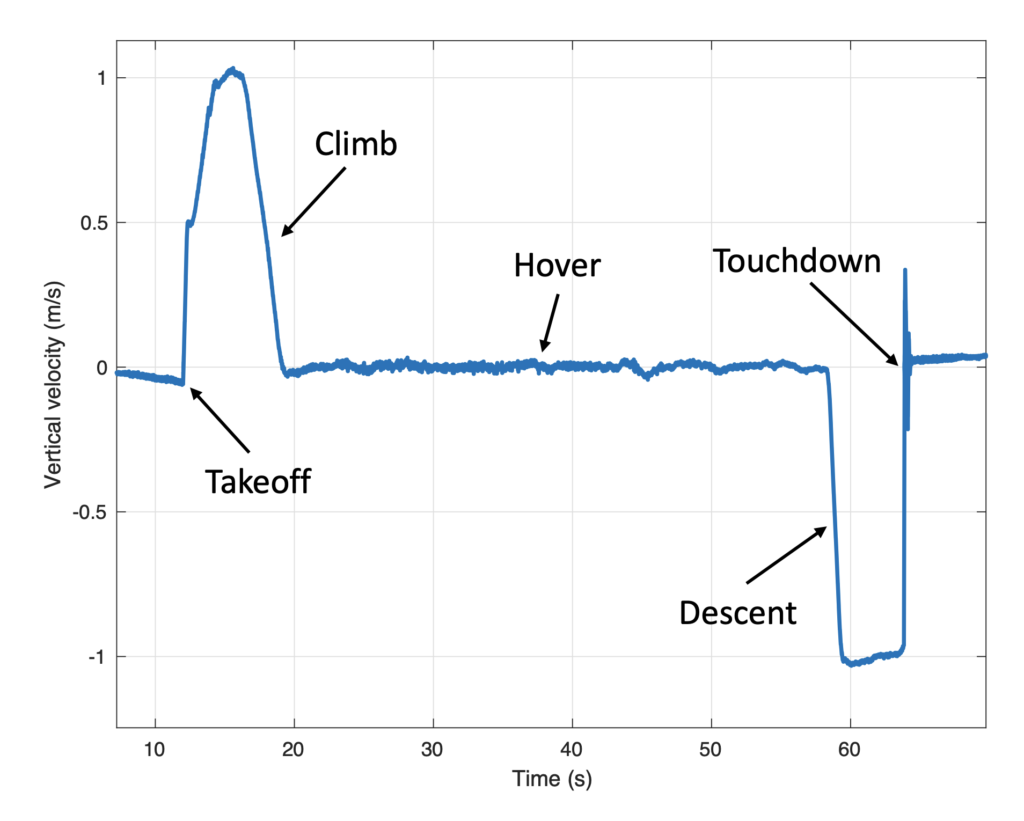
เมื่อ Ingenuity บินขึ้นได้ความสูง 5 เซนติเมตร ระบบ Flight Control ของ Ingenuity จะ Takeover Control Surface ทั้งหมดและเพิ่มระดับไปยังระดับที่ Plan ไว้ก่อนบินด้วยความเร็วแนวดิ่ง 1 m/s ระหว่างที่ Ingenuity อยู่ต่ำกว่า 1 เมตร และตอนที่มันลงจอด มันจะใช้เพียงแค่ระบบ IMU (Inertial Measurement Unit) ในการคำนวณตำแหน่ง ทิศทาง ความสูง และค่าอื่น ๆ ทั้งหมด แทนที่การใช้เซนเซอร์และกล้องของ Navigation System ที่เที่ยงตรงกว่าในการวัดความสูงเนื่องจากตอนบินขึ้นใหม่ ๆ อาจมีฝุ่นเกาะเซนเซอร์ทำให้มันเพี้ยนได้ การใช้ IMU เพียงอย่างเดียวก็เหมือนกับการเดินนับก้าวแล้วเอามาคำนวณว่าเดินไปกี่เมตรแล้วซึ่งคลาดเคลื่อนได้ง่ายมาก แต่มันจะอยู่ใน Mode นี้แค่ไม่กี่วินาทีจึงถือว่าพอรับได้
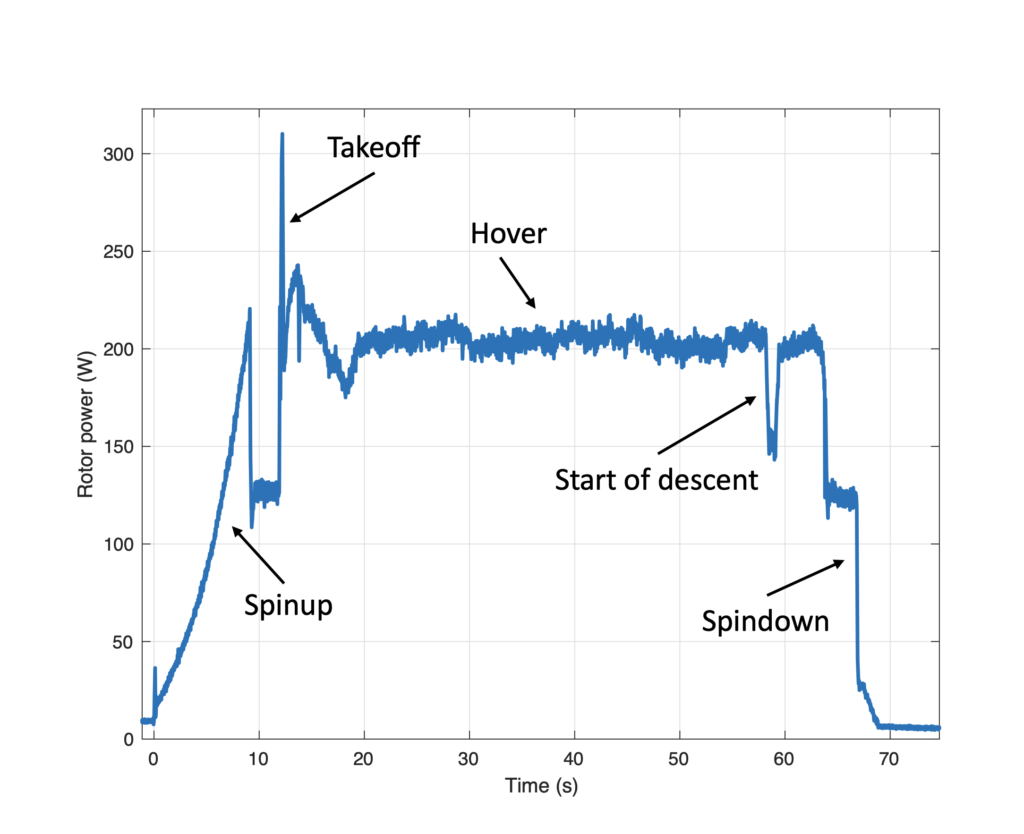
หลังจากบินขึ้นสูงกว่า 1 เมตร จึงจะเปิดใช้งานระบบเซนเซอร์และกล้องใน Navigation System เพื่อใช้งานเป็นระบบ Redundant ร่วมกับ IMU เรายังพบว่า Ingenuity ณ ตอน Takeoff ในเวลา 0.25 วินาทีนั้นใช้พลังงานเพิ่มแบบกะทันหันไปที่ 310 watts ซึ่งแบตเตอรี่สามารถรองรับการกระชากกระแสไฟฟ้าได้ถึง 510 watts จึงถืออยู่ในเกณฑ์ที่ใช้ได้เลยทีเดียว
Hover
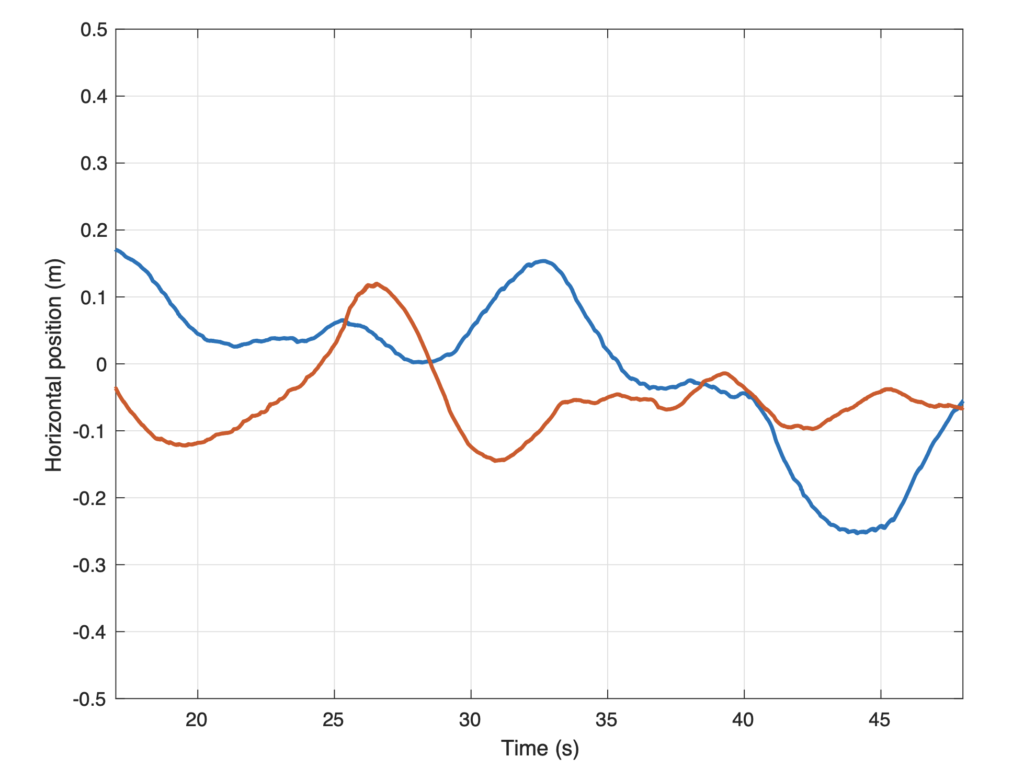
การ Hover หรือการลอยตัวอยู่กับที่ของ Ingenuity นั้นอาศัยข้อมูลจากเซนเซอร์ของมันอย่างเดียวเนื่องจากบนดาวอังคารเราไม่มีระบบ GNSS ให้ Ingenuity อ้างอิงตำแหน่งของมันเพื่อใช้ในการ Hover จึงทำให้อาจมีการคลาดเคลื่อนสูง อย่างไรก็ตามข้อมูลจาก Ingenuity บอกเราว่ามันสามารถ Hover ในระดับที่แม่นยำได้พอสมควร โดยความสูงคลาดเคลื่อนไม่เกิน 1 เซนติเมตร Pitch, Yaw, Roll เอียงจากทิศทางที่ตั้งไว้ไม่เกิน 1.5 องศา และตำแหน่งแนวราบไม่เกิน 25 เซนติเมตร ซึ่งตำแหน่งแนวราบนั้นคลาดเคลื่อนเยอะกว่าเพื่อนเนื่องจากลมมีผลต่อตำแหน่งของ Ingenuity อย่างไรก็ตาม ถือว่าทำได้ดีมาก
อากาศบนดาวอังคารถูกเฝ้าระวังด้วยอุปกรณ์ MEDA (Mars Environmental Dynamics Analyzer) บน Perseverance ซึ่งทำหน้าที่เป็นเหมือนสถานีพยากรณ์อากาศบนดาวอังคารที่คอยช่วยวัดความเร็วและทิศทางของลม เพื่อให้วิศวกรสามารถรู้สภาพอากาศล่วงหน้าก่อนนำ Ingenuity ขึ้นบินได้ โดยในเที่ยวบินโลก MEDA พบว่าความเร็วลมอยู่ที่ประมาณ 4-6 m/s จากทิศตะวันออกไปทิศตะวันออกเฉียงใต้ขณะที่ Ingenuity กำลังบิน และเร็วสูงสุดถึง 8 m/s แต่วิศวกรคาดว่าลมที่ Ingenuity เจอน่าจะเร็วกว่าที่ MEDA วัดได้ เนื่องจาก MEDA อยู่บนพื้นแต่ Ingenuity อยู่ในอากาศที่สูงขึ้นไปหลายเมตรซึ่งกระแสลมแรงกว่า
อย่างไรก็ตามแรงของลมก็จะมีผลน้อยลงตามความหนาแน่นของชั้นบรรยากาศของดาวอังคารที่น้อยลงด้วย MEDA พบว่าระหว่างการบินในเที่ยวบินที่ 1 นั้น ความหนาแน่นของชั้นบรรยากาศอยู่ที่ 0.0165 kg/m³ (ประมาณ 1.3% ของโลกที่ระดับน้ำทะเลปานกลาง) เมื่อเรามีข้อมูลเหล่านี้ เราก็สามารถนำไปคำนวณเพื่อประเมินประสิทธิภาพในการบินของ Ingenuity ได้
Collective Control
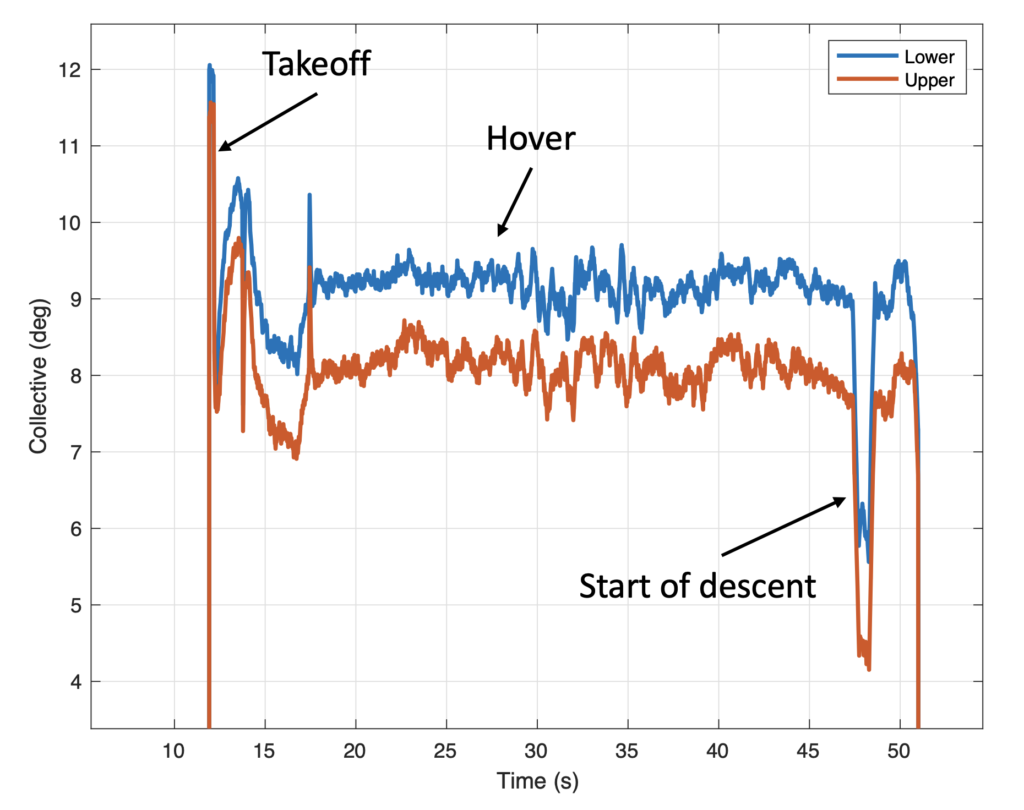
Collective Control ซึ่งมีไว้ปรับมุมต้านอากาศหรือ AOA ของใบพัดเพื่อปรับแรงยกนั้น ในเที่ยวบินที่ 1 พบว่าการ Hover ในอากาศนั้นใช้ AOA ที่ 9.2 องศาในใบพัดบนและ AOA ที่ 8.2 องศาในใบพัดล่าง อ้างอิงจาก Chord Line ของใบพัด (เส้นที่เป็นฐานของปีกเพื่อใช้อ้างอิงมุม AOA) ทีมของ Ingenuity พบว่าค่า AOA เหล่านี้ต่ำกว่าที่คาดไว้ประมาณ 0.7-0.8 องศา (AOA 9.0 Upper Rotor และ 9.9 องศา Lower Rotor) แต่อาจจะเป็นเพราะลม นอกจากนี้พลังงานที่ใช้ในการ Hover อยู่ที่ประมาณ 210 watts เท่านั้นซึ่ง Ingenuity รับได้สบาย ๆ
Cyclic Control
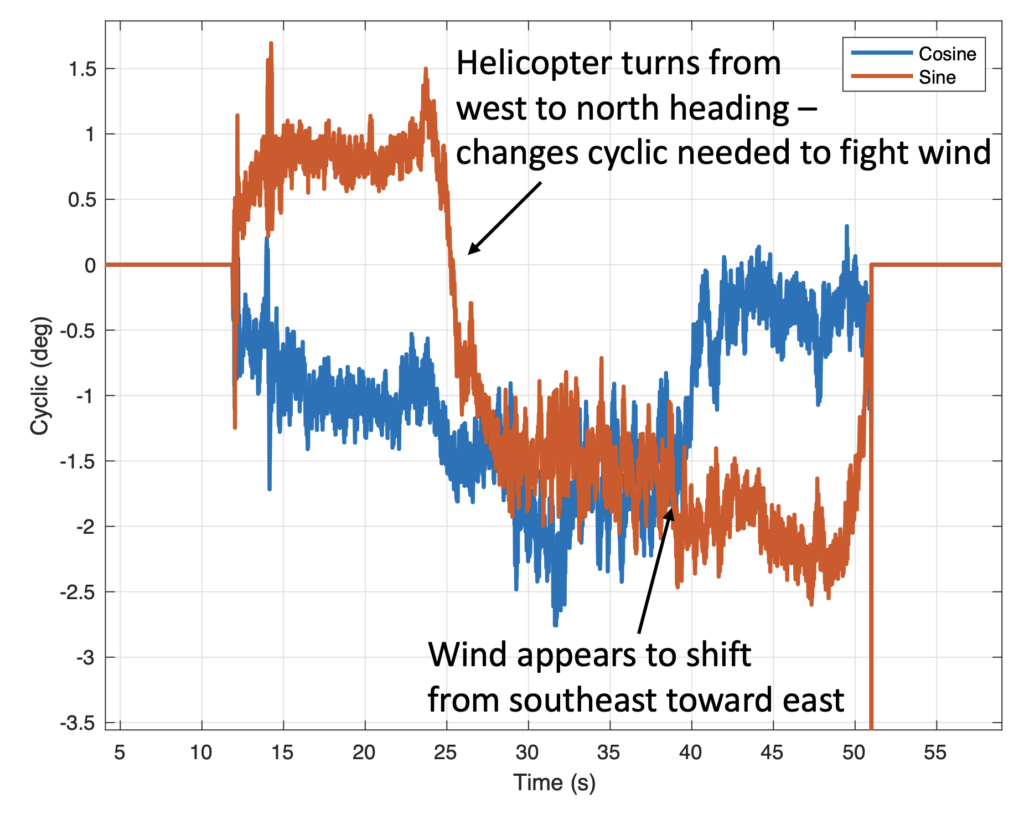
Cyclic Control ซึ่งใช้ในการ Translate หรือปรับทิศทางของ Ingenuity (Pitch และ Roll) นั้น พบการปรับเอียงใบพัดไม่เกิน 3 องศา ในขณะที่ Ingenuity สามารถเอียงใบพัดได้มากสูงสุดถึง 10 องศาเพื่อใช้ในการต้านลม ในเที่ยวบินที่ 1 พบว่า Ingenuity มีการปรับ Cyclic Control เพื่อสู้กับลมสอดคล้องกับข้อมูลของ MEDA ที่ระบุว่ามีลมจากทิศตะวันออกไปยังทิศตะวันออกเฉียงใต้
Landing
การลงจอดก็ยากไม่แพ้การขึ้นบินและการลอยตัวกลางอากาศ ก่อนที่จะลงจอด Ingenuity จะค่อย ๆ ลดระดับด้วยความเร็วแนวดิ่ง 1 m/s จากนั้นเมื่อ Ingenuity อยู่สูงเหนือพื้นดินประมาณ 1 เมตร ระบบ Flight Computer ของ Ingenuity จะตัดการใช้งานของระบบเซนเซอร์จาก Navigation System ออกเหมือนกับตอน Takeoff แล้วใช้แค่ระบบ IMU เพียงอย่างเดียวในการคำนวณ Flight Parameters ซึ่งที่ต้องใช้ IMU อย่างเดียวเพราะว่า ระบบ Navigation System ที่ใช้กล้องในการคำนวณเสี่ยงต่อการ Error ในด้านของการตรวจจับการ Touchdown ก่อนกำหนดและอาจปรับ AOA ใบพัดให้ขนานกับพื้นจน Ingenuity สูญเสียแรงยกกะทันหันและกระแทกพื้นได้นั่นเอง
หลังจากการเปลี่ยนไปใช้ระบบ IMU อย่างเดียวเพื่อแค่เสี้ยววินาที Ingenuity ก็จะอยู่เหนือพื้นแค่ 0.5 เมตรแล้ว และนี่เป็นความสูงที่ Touchdown Detection หรือระบบตรวจจับการแตะพื้นทำงาน เมื่อไหร่ที่อัตราการลดระดับของมันลดลงต่ำกว่า 25 cm/s มันจะถือว่ามันแตะพื้นแล้ว (Ingenuity ลดระดับที่ความเร็วแนวดิ่ง 1 m/s พอมันแตะพื้นค่านี้จะลดลงอย่างรวดเร็วเนื่องจากมันลดระดับต่อไม่ได้แล้วเพราะติดพื้น)
เมื่อ Ingenuity ตรวจจับการแตะพื้น Flight Computer จะสั่งให้ Control Surface ปรับ Collective Control ให้มุม AOA ต่ำที่สุด (ใบพัดขนานกับพื้นอ้างอิงจาก Chord Line) ซึ่งจะทำให้ Ingenuity ไม่สร้างแรงยกหรือสร้างน้อยมาก ๆ จากนั้นมันจะรอ 3 วินาทีเพื่อยืนยันว่า Ingenuity อยู่บนพื้นแล้วก่อนที่จะเริ่มหยุดหมุนใบพัดของมัน (Spindown)
จริง ๆ แล้วความเร็วในการลดระดับซึ่งอยู่ที่ 1 m/s ถือว่าเร็วมาก เฮลิคอปเตอร์บนโลกยังต่ำกว่า ที่ต้องเร็วแบบนี้เพราะว่า Ingenuity มันเป็นเฮลิคอปเตอร์ที่จะถือว่าเป็น Autopilot ก็ได้ ทุกการบินมันอาศัยข้อมูลจากระบบเซนเซอร์ของมันไม่ว่าจะเป็นจาก IMU และ Navigation System ไม่เหมือนกับเฮลิคอปเตอร์บนโลกที่มีนักบินซึ่งใช้การกะระยะด้วยความรู้สึกและสายตาที่มี Depth Perception ในการลงจอด
ในการลงจอด เมื่อ Ingenuity ตัดระบบ Navigation System และใช้เพียงแค่ IMU หมายถึงมันกำลังลงจอดด้วย Sensory Unit ที่หายไปหนึ่งระบบ นึกง่าย ๆ ว่าถ้าเป็นมนุษย์ก็คือตาบอด (ไม่มี Navigation System) แต่ใช้ IMU เพียงอย่างเดียว (เทียบเท่าหู และระบบการทรงตัวในหู) การใช้ IMU อย่างเดียวมีข้อเสียร้ายแรงอย่างหนึ่ง คือ ความคลาดเคลื่อนจะค่อย ๆ เกิดขึ้นและสะสมไปเรื่อย ๆ เรียกว่า Accumulated Error วิศวกรของ Ingenuity ต้องการที่จะลดความเสี่ยงจาก Error ดังกล่าวให้มากที่สุดด้วยการใช้เวลาอยู่ใน IMU-only Mode ให้น้อยที่สุด และการตัดระบบเซนเซอร์กล้องของ Navigation System แล้วเปลี่ยนไปใช้ IMU อย่างเดียวในตอนลงจอดก็ช่วยชีวิต Ingenuity มาแล้วครั้งหนึ่งในเที่ยวบินที่ 6 ซึ่งไม่ใช่จาก Accumulated Error เองด้วยซ้ำ แต่จากระบบที่ป้องกัน Accumulated Error ซึ่งเกิดพังซะเอง
เหตุใดการใช้เพียงแค่ IMU เป็นเหตุผลที่ Ingenuity รอดจาก Accumulated Error ในเที่ยวบินที่ 6 ด้วย – Accumulated Error ความผิดปกติในเที่ยวบินที่ 6 ของ Ingenuity เกิดอะไรขึ้นกับระบบ IMU และระบบนำทาง
นอกจากนี้การลดระดับแบบเร็ว ๆ จะทำให้ Ingenuity สามารถตรวจจับการเปลี่ยนแปลงของความเร็วแนวดิ่งเมื่อขาของ Ingenuity แตะกับพื้นได้ชัดเจนขึ้น ทำให้ Ingenuity สามารถเปลี่ยนโหมดการบินและ Spindown ใบพัดได้อย่างปลอดภัยนั่นเอง
เรียบเรียงโดย ทีมงาน SPACETH.CO
อ้างอิง
What We’re Learning About Ingenuity’s Flight Control and Aerodynamic Performance