บนโลกมีรถขับเคลื่อนอัตโนมัติหรอ? บนดาวอังคารก็มีแต่เป็นโรเวอร์
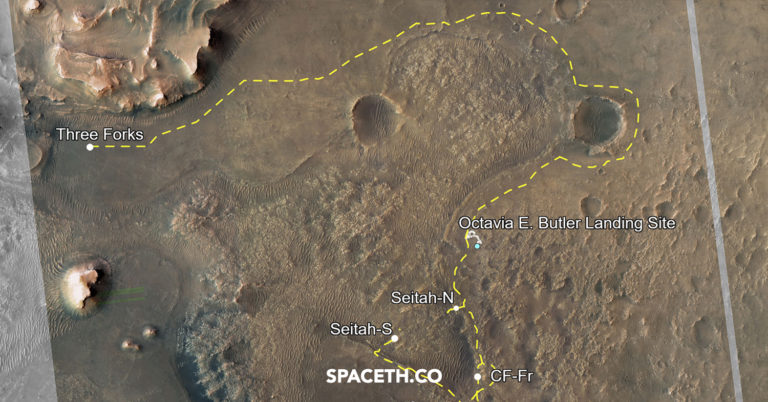
หลังจากที่ Perseverance ได้แผนที่การเดินทางแรกของมันสำหรับการสำรวจ Crater Floor ของ Jezero Crater เพื่อค้นหาร่องรอยของสิ่งมีชีวิตบนดาวอังคารแล้ว ตอนนี้มันก็ได้เริ่มออกเดินทางแล้วโดยมีทีมวิศวกรของ JPL ดูแลตลอดการเดินทาง แต่ครั้งนี้ต่างออกไปเพราะ Perseverance ไม่จำเป็นต้องพึ่งมนุษย์ในการเดินทางแต่สามารถนำทางไปยังเป้าหมายได้ด้วยตัวเองผ่านระบบนำทางอัตโนมัติที่เรียกว่า “AutoNav”
AutoNav คืออะไร
AutoNav เป็นระบบนำทางและขับเคลื่อนอัตโนมัติของ Perserverance โดย AutoNav จะสร้างแผนที่สามมิติของพื้นผิวรอบ ๆ มันด้วยตัวเองเพื่อระบุว่าพื้นผิวรอบ ๆ มันมีลักษณะเป็นยังไงและมีอันตรายใด ๆ หรือไม่หากจะขับผ่าน หากพบอุปสรรค AutoNav จะสามารถสร้างเส้นทางใหม่เพื่ออ้อมอุปสรรคดังกล่าวได้โดยอัตโนมัติ ไม่จำเป็นต้องรอคำสั่งจากวิศวกรบนโลก
อย่างไรก็ตามระบบ AutoNav ไม่ได้มีบน Perserverance เป็นคันแรก เพราะรุ่นพี่ของมันอย่าง Curiosity ก็มีระบบ AutoNav เช่นกัน แต่เป็นเทคโนโลยีและระบบที่ล้าหลังกว่า AutoNav บน Perseverance เรียกได้ว่าถอดแบบกันมาแถบจะเกือบทุกอย่าง
ระบบ AutoNav นั้นทำให้ Perseverance ไม่จำเป็นต้องถูกบังคับด้วยวิศวกรเองตลอดเวลาแต่สามารถไปให้มันขับเคลื่อนได้ด้วยตัวเอง ซึ่งนี่ทำให้ Perseverance สามารถขับเคลื่อนได้ไกลกว่า 120 เมตร/ชั่วโมง ซึ่งเร็วกว่าระบบ AutoNav บน Curiosity ที่ทำความเร็วสูงสุดได้เพียง 20 เมตร/ชั่วโมง เป็นอย่างมาก เนื่องจากระบบ AutoNav แบบใหม่บน Perseverance ใช้การกระทำหรือคำสั่งจากมนุษย์ (Human Interaction) น้อยลงกว่า Curiosity 4 ถึง 5 เท่า (ระบบมันฉลาดขึ้น)
ให้นึกอย่างงี้ สมมุติว่า Perseverance เป็นรถบังคับแล้วเรามีรีโมทบังคับมีจอให้เราดู แต่การที่เราบิดรีโมทบังคับทีนึง อีก 5 ถึง 20 นาทีต่อมารถบังคับถึงจะเคลื่อนที่ให้เราแล้วก็อีก 5 ถึง 20 นาทีภาพจากรถบังคับถึงจะมาให้เราเห็น หากเป็นเช่นนี้เราจะกล้าบังคับให้มันเคลื่อนที่แบบเดินหน้าซ้ายขวาพร้อมกันหรือไม่ ก็ไม่เพราะเราไม่รู้ว่าบิดไปทีหนึ่งแล้วมันจะเคลื่อนที่ไปยังไง จึงต้องทำทีละอย่าง เช่น เดินหน้าไปดูก่อนซัก 10 เมตร พอยืนยันได้แล้วว่ามันเดินหน้าไปแล้วก็อาจจะค่อยเลี้ยว ซึ่งคำสั่งแต่ละอันเดินทางไปกลับโลกอาจใช้เวลาเกือบชั่วโมง ทำให้โรเวอร์บนดาวอังคารเคลื่อนที่ไปมาได้ช้ามาก เพราะมันต้องรอคำสั่งจากมนุษย์
ระบบ AutoNav ทำให้เราสามารถตัดการมีส่วนร่วมของมนุษย์ออกไปได้ส่วนหนึ่งทำให้ทุกอย่างเร็วขึ้นมาก อย่างไรก็ตามมันก็ยังต้องอาศัยมนุษย์ป้อนข้อมูลการเดินทางให้อยู่ดีว่าจะให้มันไปไหนแล้วพอถึงแล้วจะให้ทำอะไรต่อ
ระบบ AutoNav กับมนุษย์
ถึง Perseverance จะอาศัย AutoNav ในการขับเคลื่อน ซึ่งก็เหมือนเป็นโชเฟอร์แท็กซี่ มันก็จะต้องรอรับคำสั่งจากทีมวิศวกรของโรเวอร์ ซึ่งเป็นเหมือนลูกค้าว่าจะให้มันไปไหน และข้อมูลสถานที่ต่าง ๆ ก็จะต้องมาจากลูกค้าด้วยเช่นกัน ดังนั้นทีมวิศวกรที่ทำหน้าที่วางแผนการเดินทางจึงสำคัญเป็นอย่างมากเพราะบนดาวอังคารไม่มี Google Map และบนพื้นอาจจะมีหินมีหลุมมีบ่อทรายที่เป็นอันตรายต่อโรเวอร์ได้
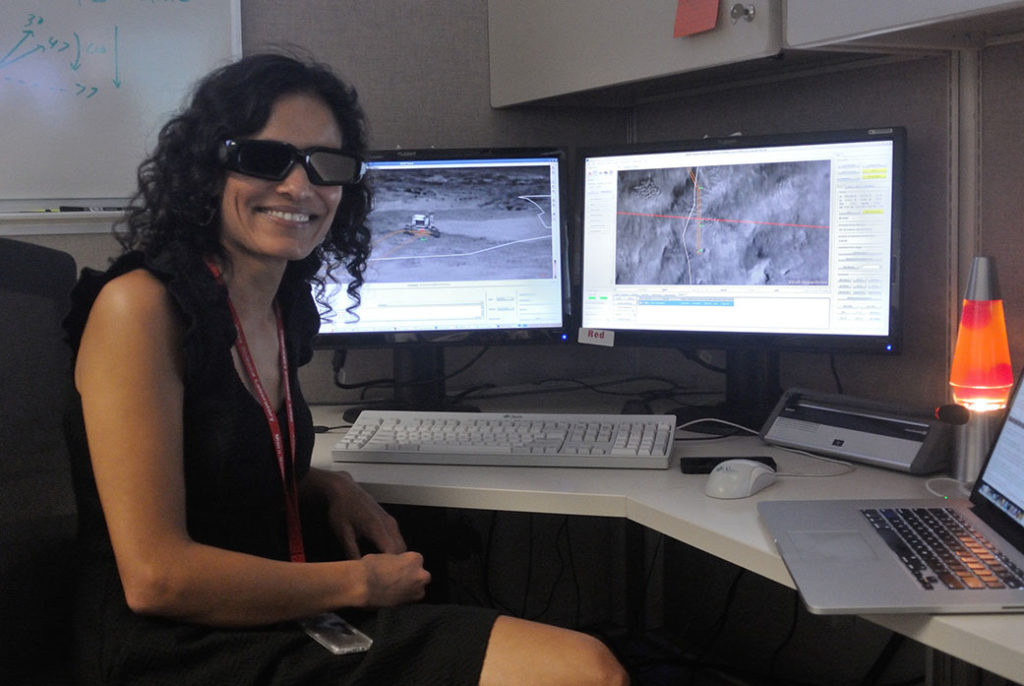
ทำให้ทีมวิศวกรของ Perseverance จะต้องศึกษาสภาพแวดล้อมในเส้นทางที่ Perseverance จะเดินทางให้ดีก่อน จึงต้องอาศัยการวิเคราะห์ภาพถ่ายดาวเทียม บางครั้งถึงขั้นต้องเอาภาพถ่ายดาวเทียมมาประกอบกันเป็นภาพพื้นผิว 3 มิติให้ทีมวิศวกรใส่แว่น 3 มิติศึกษาสภาพทางภูมิศาสตร์ก่อนที่จะแพลนเส้นทางให้ Perseverance นอกจากนี้คำสั่งที่จะส่งไปให้ Perseverance อาจใช้เวลาหลายชั่วโมงในการส่งผ่าน Deep Space Network และ Mars Relay Network ทำให้จะต้องส่งทิ้งไว้แล้วตั้งเวลาให้โรเวอร์ดำเนินการตามคำสั่งในวันถัดไป
ที่ Curiosity ไม่สามารถวิ่งได้ไกลเท่ากับ Perseverance ด้วยระบบ AutoNav นั้น เป็นเพราะว่าระบบ AutoNav ใน Curiosity มี Software และ Hardware ที่ยังไม่มีความสามารถพอที่จะขับหลบหินแหลม ๆ บนพื้นได้อย่างมีประสิทธิภาพ ก็เลยเหยียบแทงล้อไปเต็ม ๆ จนทำให้ล้อเสื่อมสภาพเร็วกว่าปกติจนต้องเปลี่ยนมาพึงการขับเคลื่อนโดยมนุษย์เพื่อลดการเสื่อมสภาพโดยไม่จำเป็น แต่ AutoNav ของ Perseverance สามารถข้ามปัญหาตรงนี้ไปได้แล้วด้วยระบบ AutoNav ที่ดีขึ้น ล้อที่ถูกออกแบบมาให้ทนมากขึ้น และความสูงของตัวโรเวอร์ที่ทำให้มันสามารถขับผ่านพื้นผิวขรุขระได้โดยไม่เอาท้องของมันไปขูดพื้น
นอกจากนี้ Curiosity ยังมีระบบคอมพิวเตอร์ที่เก่าพอสมควร (อย่างน้อยก็คือเทคโนโลยียุค 2000 – 2010) ซึ่งไม่สามารถทำ Multi-tasking หรือทำหลาย ๆ อย่างพร้อม ๆ กันได้ เช่น นำทางไปด้วยและบังคับมอเตอร์เพื่อขับเคลื่อนไปด้วยได้ แต่ Perseverance สามารถทำได้แล้ว และหลาย ๆ อุปกรณ์ยังถูกออกแบบมาให้ใช้ได้หลายวัตถุประสงค์อีกด้วย อย่างเช่นระบบ VCE (Vission Compute Element) และ Visual Odometry
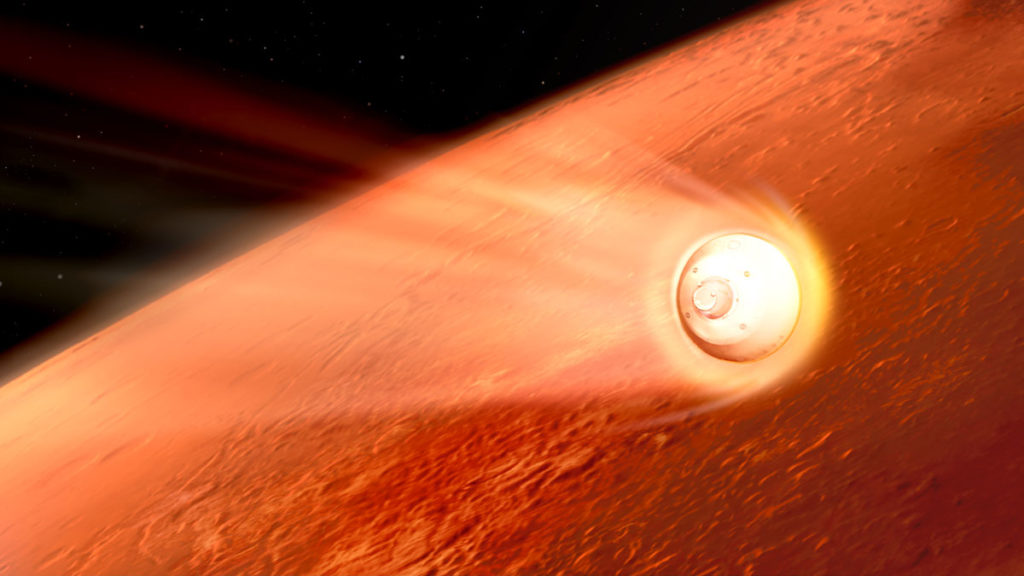
ระบบ Vission Compute Element หรือ VCE นั้นเป็นระบบนำทางลงจอดระหว่างการ EDL (Entry, Descent, Landing) ของ Perseverance และตอนนี้ข้อมูลของมันที่ใช้ตอนเข้าสู่ชั้นบรรยากาศและลงจอดกำลังถูกเอามาใช้ในการสร้างแผนที่บริเวณจุดลงจอดเพื่อใช้ในการนำทาง
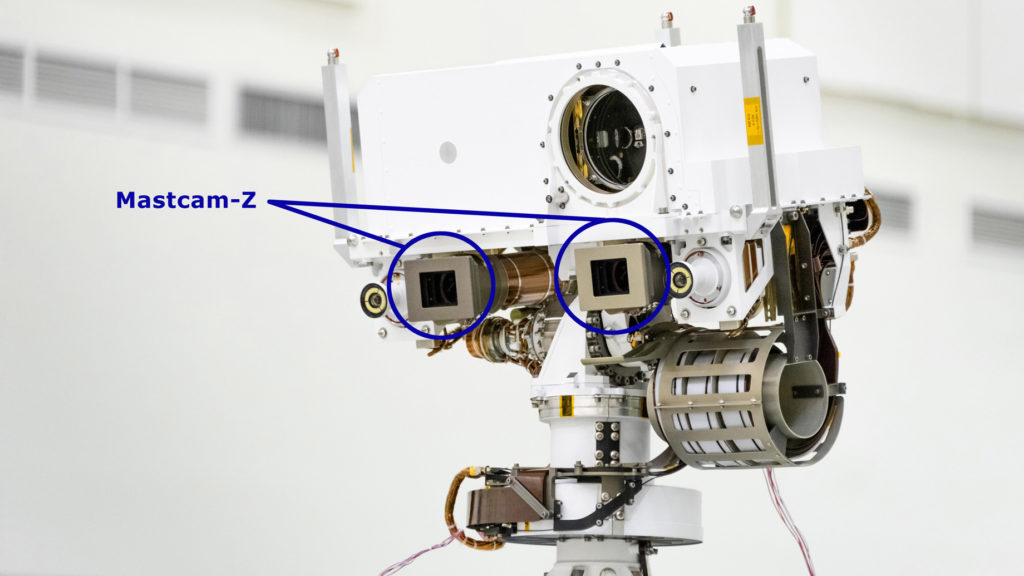
ระบบ Visual Odometry เป็นการประยุกต์ใช้ภาพที่ถ่ายจาก Perseverance แล้วเปรียบเทียบว่าวัตถุจุดเด่นในภาพเคลื่อนที่ไปในทิศทางที่คาดการณ์ไว้หรือไม่เพื่อประมาณระยะทางที่มันเคลื่อนที่ไปแล้ว อาศัยกล้องอย่าง Mastcam-Z ที่มีสองอันซ้ายขวาทำหน้าที่เหมือนตาของมนุษย์ที่สามารถสร้าง Depth Perception เพื่อทำให้เรารู้ได้ว่าวัตถุไหนอยู่ไกลหรือใกล้กว่ากันนั่นเอง
ที่เป็นครั้งแรก ๆ ที่เราได้เห็นโรเวอร์ขับเคลื่อนอัตโนมัติบนดาวอังคาร
อ่านแผนการเดินทางของ Perseverance ได้ที่นี่ – Perseverance เริ่มการเดินทางอันยาวไกลสู่ Jezero Crater ค้นหาร่องรอยของสิ่งมีชีวิต
เรียบเรียงโดย ทีมงาน SPACETH.CO
อ้างอิง
NASA’s Self-Driving Perseverance Mars Rover ‘Takes the Wheel’