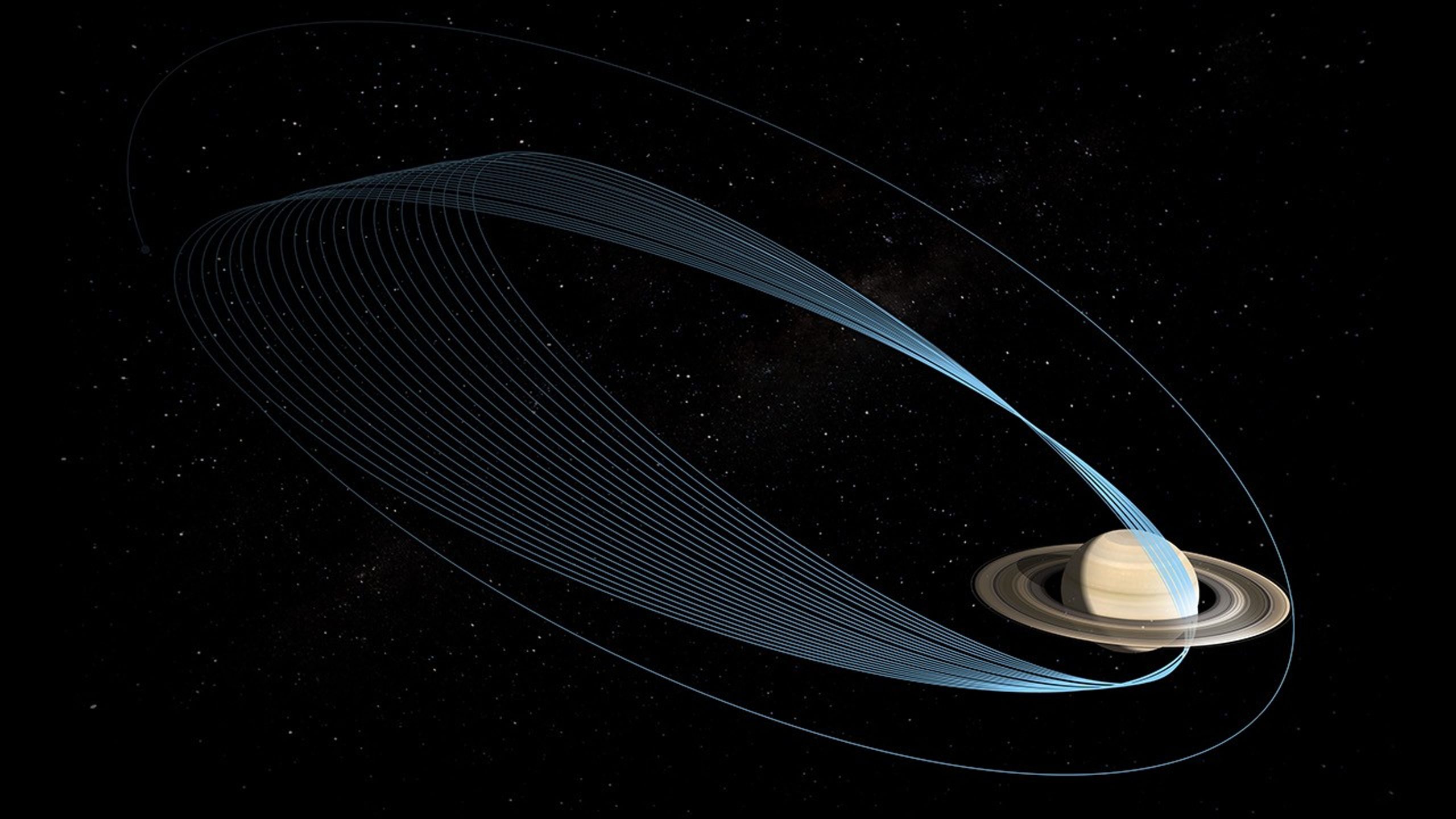
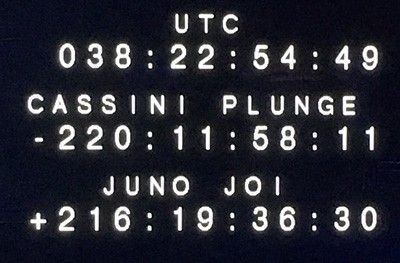
เมื่อเรามองภาพถ่ายอันงดงามของ Cassini ที่โคจรรอบดาวเสาร์ตลอด 13 ปี มันอาจดูเหมือนการเดินทางอิสระท่ามกลางวงแหวนและดวงจันทร์มากมาย แต่เบื้องหลังคือความจริงที่ซับซ้อนกว่านั้นอย่างมหาศาล Cassini ไม่ได้ “บินวน” อย่างง่ายดายเหมือนยานในภาพยนตร์ ทุกวงโคจรถูกกำหนดล่วงหน้าด้วยการคำนวณ Trajectory ที่แม่นยำในระดับวินาที การแก้เส้นทางด้วยแรงขับเพียงไม่กี่เมตรต่อวินาทีสามารถเปลี่ยนเส้นทางให้โฉบเฉียดดวงจันทร์ไททันหรือเอนเซลาดัสได้ตามแผน และทุกการตัดสินใจขึ้นอยู่กับข้อมูล Doppler, Ranging, Ephemeris และ Star Tracker ที่ช่วยให้ยานรู้ว่าตัวเองอยู่ตรงไหนในห้วงอวกาศที่ไร้พิกัดอ้างอิงจริง ๆ ความงดงามที่เราเห็นจึงไม่ใช่ความบังเอิญ
ถ้าเราจะพูดถึง “การรู้ว่าตัวเองอยู่ที่ไหน” บนโลก มันคือสิ่งที่เราชินจนแทบไม่เคยคิดถึงกลไกเบื้องหลังจริง ๆ เลย ทุกวันนี้เครื่องบินที่บินอยู่เหนือหัวเรา แทบทั้งหมดติดตั้งระบบที่เรียกว่า ADS-B หรือ Automatic Dependent Surveillance–Broadcast อยู่แล้ว ระบบนี้คือหัวใจของสิ่งที่ทำให้แอปอย่าง Flightradar24 ทำงานได้ เพราะเครื่องบินแต่ละลำจะส่งสัญญาณออกมาเป็นพิกัดที่คำนวณจาก GPS ของตัวเอง แล้ว Broadcast ออกไปแบบ Public ให้ใครก็ตามที่มี Receiver ฟังได้ แถมสัญญาณยังรวมเอาข้อมูลความสูง ความเร็ว และ Heading ของเครื่องบินด้วย ตรงนี้เองที่ทำให้เครือข่ายผู้รับสัญญาณภาคพื้นดินซึ่งกระจายตัวอยู่ทั่วโลก (ตั้งแต่สถานีควบคุมการบิน ไปจนถึงอาสาสมัครที่ตั้งเสาอากาศเล็ก ๆ ที่บ้าน) สามารถสร้าง Global Picture ของการจราจรทางอากาศได้แบบ Real-time อย่างที่เราเห็นในเว็บแผนที่บนมือถือ แต่ที่สำคัญคือทั้งหมดนี้เกิดขึ้นบนโลกที่มีระบบโครงสร้างพื้นฐาน หนาแน่น ทั้งเครื่องส่งสัญญาณ ระบบเรดาร์ และระบบดาวเทียม GPS ที่อยู่ใน Medium Earth Orbit ซึ่งออกแบบมาเพื่อยิงสัญญาณครอบคลุม “ผิวโลก” เป็นหลัก
ในโลกของ GPS กลไกเบื้องหลังคือเครื่องรับจะจับสัญญาณเวลา หรือ Timing Signal จากดาวเทียมหลายดวง แล้วใช้หลักการ Trilateration คำนวณหาตำแหน่งบนพื้นผิวโลกได้ภายในระดับความแม่นยำเมตรเดียว สิ่งนี้เป็นไปได้เพราะเรามี Constellation ของดาวเทียมที่ออกแบบให้กระจายครอบคลุมทุกจุดบนโลกตลอดเวลา แต่สำหรับยานอวกาศที่โคจรสูงกว่านั้นขึ้นไป หรือบินออกไปไกลจากโลกหลายล้านกิโลเมตร มันไม่สามารถ “เห็น” Constellation ในแบบเดียวกับบนโลกได้อีกต่อไป
ถ้าอย่างนั้นก่อนหน้านั้นมนุษย์รู้ตำแหน่งตัวเองได้ยังไง
ตรงนี้คือรากฐานของคำว่า Wayfinding ที่แท้จริง ในการเดินเรือโบราณ มนุษย์อาศัยการสังเกตดาวบนท้องฟ้า การวัดมุมด้วยเครื่องมืออย่าง Sextant และที่สำคัญที่สุดคือการวัด “เวลา” อย่างแม่นยำผ่าน Marine Chronometer เพื่อคำนวณหาลองจิจูด คือ Latitude หาได้จากดาว แต่ Longitude ต้องใช้เวลา การตี Grid ของละติจูด–ลองจิจูดบนโลกคือการยกระดับจากการ “เดา” ไปสู่การ “คำนวณ” และเปลี่ยนการเดินทางของมนุษยชาติไปตลอดกาล

แนวคิดนี้เองที่ถูกสืบทอดเข้ามาในยุคอวกาศ เพียงแต่เปลี่ยนจากการสังเกตด้วยสายตาเป็นกล้อง Star Tracker และเปลี่ยนจากนาฬิกาเดินเรือเป็นการวัดเวลาอย่างแม่นยำด้วยการวาง Epoch การ Tracking ยานอวกาศจึงไม่ใช่แค่การ “ตามสัญญาณ” แบบที่ Flightradar ทำกับเครื่องบิน แต่คือการผสมผสานระหว่าง Radio Navigation, Celestial Navigation และ Precision Timing ที่ต้องอาศัยเครือข่ายภาคพื้นดินยักษ์ใหญ่อย่าง Deep Space Network หรือ DSN เข้ามาเป็นศูนย์กลาง
หรือพูดอีกแบบหนึ่ง ทุกการ Tracking ไม่ว่าจะเป็นเครื่องบินหรือยานอวกาศ ก็เป็นการหาคำตอบเดียวกันว่า “เราอยู่ตรงไหน และกำลังจะไปทางไหน” เพียงแต่บนโลกเรามีโครงสร้างพื้นฐานพร้อมสรรพ ในขณะที่ในอวกาศ สิ่งที่เรามีมีเพียงโลกใบเดียวกับสัญญาณวิทยุที่อ่อนเหลือเกิน ซึ่งต้องใช้ศาสตร์เกือบทุกแขนงเพื่อค่อย ๆ คลี่ออกมาเป็น Trajectory ที่เชื่อถือได้
ยุคแรกที่มนุษย์ส่งดาวเทียมขึ้นสู่วงโคจรและเรารู้ตำแหน่งของมัน
การ Tracking ยุคแรกสุดของอวกาศ ไม่ได้เริ่มจากเครือข่ายสถานีระดับโลก ไม่ได้มี Optical Navigation หรือ Star Tracker แต่เริ่มจากสิ่งที่พื้นฐานที่สุด นั่นคือสัญญาณวิทยุ “บี๊บ ๆ” ที่ดังออกมาจากโลหะทรงกลมขนาดเพียง 58 เซนติเมตร นั่นคือ Sputnik 1 ที่โซเวียตปล่อยขึ้นสู่วงโคจรเมื่อวันที่ 4 ตุลาคม 1957
สิ่งที่หลายคนมักลืมก็คือ ก่อนที่จะ Tracking ได้ เราต้องมั่นใจเสียก่อนว่า “มันจะขึ้นไปโคจรได้จริง” นี่คือความท้าทายเชิงวิศวกรรมและฟิสิกส์ที่โซเวียตในยุคนั้นต้องเผชิญ พวกเขาต้องคำนวณ Orbital Mechanics ตั้งแต่ก่อนการปล่อย ว่าถ้าเราจะวางดาวเทียมบน Low Earth Orbit ที่สูงราว 200–300 กิโลเมตร เราต้องให้ความเร็ว “วงโคจร” Orbital Velocity ประมาณ 7.8 กิโลเมตรต่อวินาที หากต่ำกว่านี้มันจะตกกลับโลก หากสูงเกินไปมันจะกลายเป็นวงโคจรที่ยกตัวขึ้นเรื่อย ๆ หรือหลุดหนีไป

การคำนวณพวกนี้อิงกับ กฎของเคปเลอร์ และ สมการจรวด Tsiolkovsky Rocket Equation ซึ่งวิศวกรต้องนำมาประกอบเข้ากับข้อมูลสมรรถนะของจรวด R-7 Semiorka ที่ดัดแปลงมาจากขีปนาวุธข้ามทวีป ICBM ทุกองศาของการยิงขึ้นท้องฟ้าคือผลลัพธ์จากการแก้ปัญหา Two-Body Problem ของโลก–ดาวเทียม ที่รวมเข้ากับเงื่อนไขทางภูมิศาสตร์ เช่น ความเอียงของวงโคจร หรือ Orbital Inclination ที่โซเวียตเลือกให้ครอบคลุมพื้นที่บ้านตัวเองได้มากที่สุด
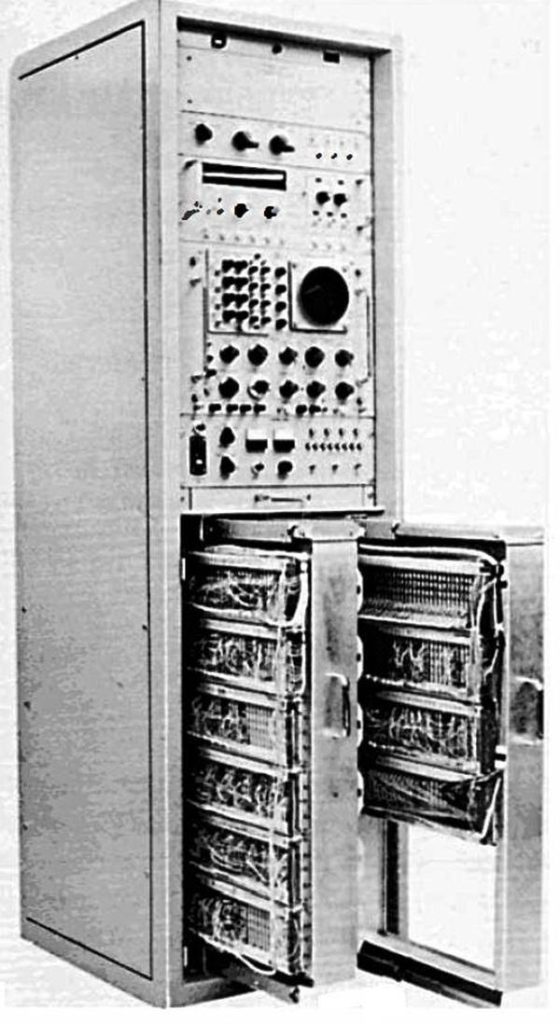
พอจรวดพาดาวเทียมขึ้นสู่วงโคจรได้แล้ว สิ่งที่โซเวียตทำให้โลก “เชื่อ” ว่านี่คือดาวเทียมดวงแรกจริง ๆ ไม่ใช่แค่โฆษณาชวนเชื่อ ก็คือการให้ Sputnik ส่งสัญญาณวิทยุออกมาบนย่านความถี่ 20.005 MHz และ 40.002 MHz เสียง “บี๊บ บี๊บ” ที่นักวิทยุสมัครเล่นทั่วโลกสามารถรับได้กลายเป็นหลักฐานที่ปฏิเสธไม่ได้ว่าวัตถุนี้กำลังโคจรอยู่เหนือท้องฟ้าจริง ๆ
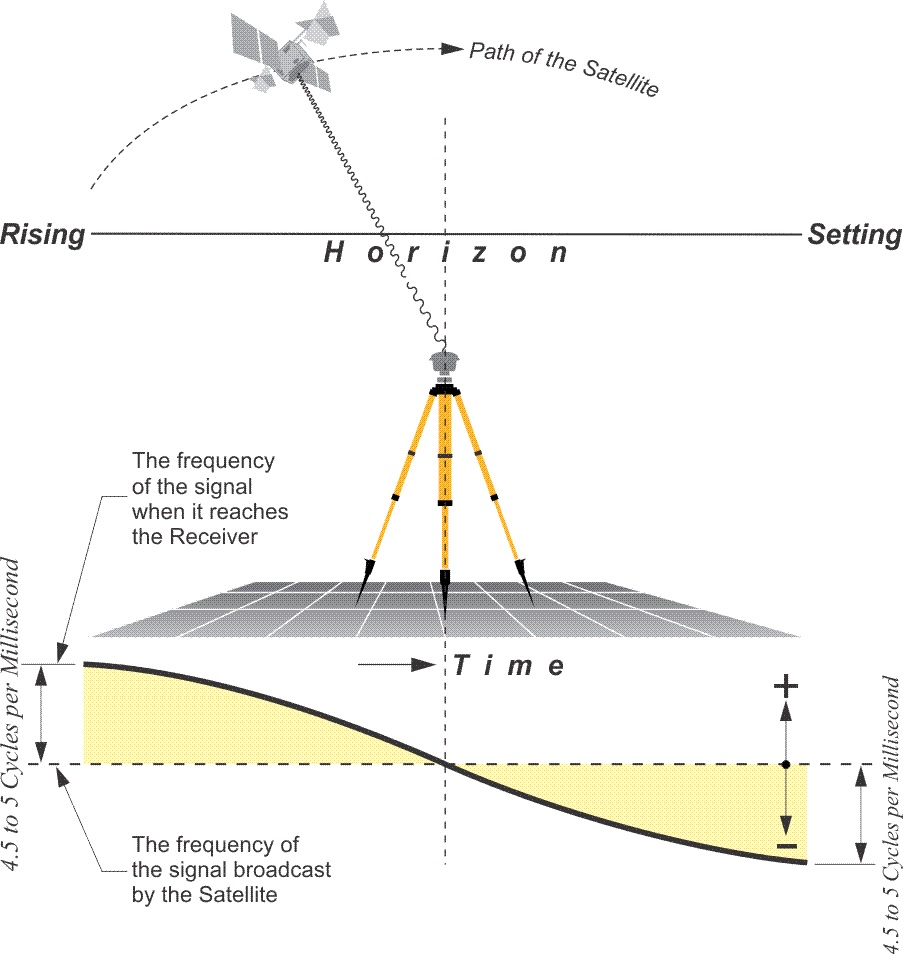
เทคนิคการ Tracking ที่ใช้กับ Sputnik อาศัยการวัด Doppler Shift ของสัญญาณ ถ้าดาวเทียมเคลื่อนที่เข้าหาสถานีรับ ความถี่ที่วัดได้จะสูงกว่าความถี่ส่ง และถ้าเคลื่อนที่ออกห่าง ความถี่ก็จะต่ำลง การบันทึกเส้นโค้ง Doppler แบบนี้จากหลายสถานี ทำให้นักวิทยาศาสตร์สามารถย้อนคำนวณหาวงโคจร หรือ Orbit Determination ได้อย่างแม่นยำ
พูดอีกแบบ สิ่งที่เราเรียกว่า “การติดตามดาวเทียม” ในยุคนั้นก็คือการฟังเสียงวิทยุที่เบี้ยวไปตามกฎ Doppler แล้วใช้สมการฟิสิกส์ตีความว่ามันบินอยู่เหนือหัวเราใน Path ไหน ความยิ่งใหญ่ของ Sputnik จึงไม่ใช่แค่การเปิดยุคอวกาศ แต่ยังเป็นการพิสูจน์ว่า มนุษย์สามารถคำนวณและมั่นใจในวงโคจรได้ก่อนที่จะมีระบบ Tracking หรูหราใด ๆ และการ “ฟังเสียงบี๊บ” ก็เป็นการยืนยันขั้นสุดท้ายว่าการคำนวณนั้นถูกต้อง
จุดเริ่มต้นของ Deep Space Network
ทันทีที่ Sputnik ส่งเสียง “บี๊บ” ก้องออกมา มันไม่ใช่แค่สัญญาณจากวงโคจร แต่คือ “สัญญาณเตือน” ต่อสหรัฐอเมริกาด้วย ความจริงก็คือก่อนหน้านั้นสหรัฐเองก็มีโครงการดาวเทียมอยู่แล้ว นั่นคือ Project Vanguard ที่ทำโดย Naval Research Laboratory แต่การทดสอบปล่อยในปี 1957 กลับล้มเหลวต่อหน้ากล้องถ่ายทอดสด สร้างภาพจำที่สังคมอเมริกันเรียกกันว่า Flopnik ต่างจากโซเวียตที่สามารถส่ง Sputnik 1 และต่อด้วย Sputnik 2 ได้สำเร็จรวดเดียว
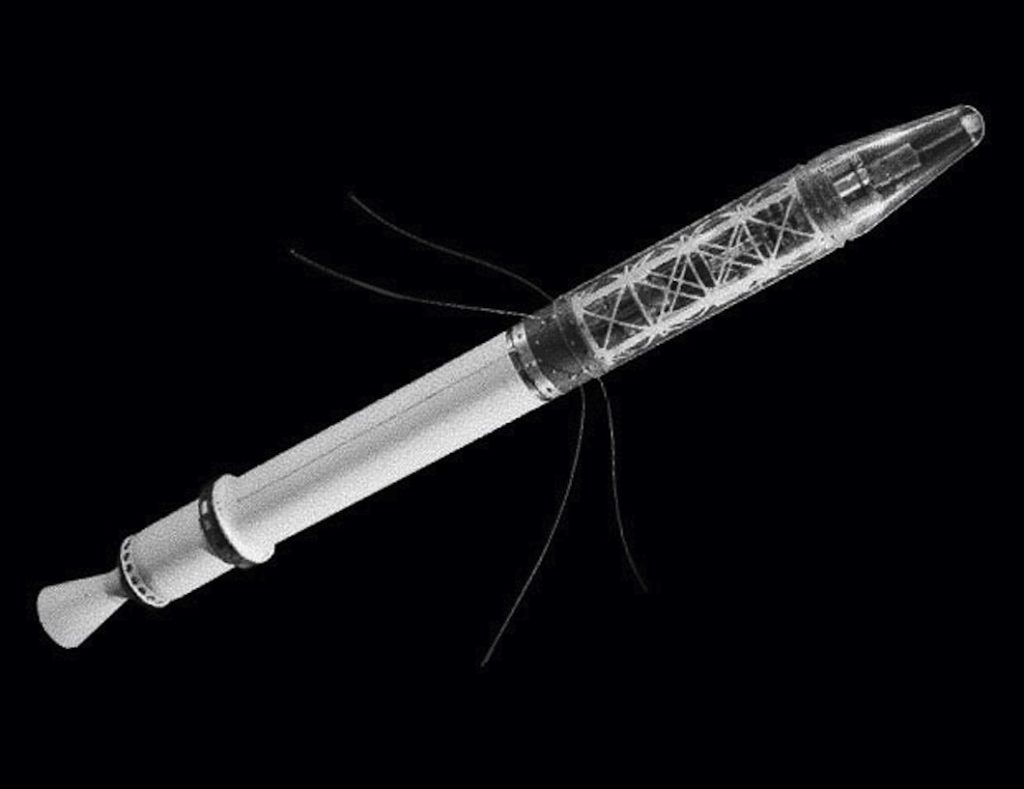
“Sputnik Shock” ทำให้สหรัฐต้องเร่งเครื่องอย่างหนัก จนเกิดการก่อตั้ง NASA ในปี 1958 และปล่อย Explorer 1 โดย Jet Propuslion Laboratory หรือ JPL ได้สำเร็จในเวลาไม่ถึง 4 เดือนหลัง Sputnik ความสำเร็จของ Explorer 1 ไม่เพียงแต่ทำให้สหรัฐกลับมาทันคู่แข่ง แต่ยังค้นพบ Van Allen Radiation Belt ผ่านเครื่องวัด Cosmic Ray Detector อีกด้วย
สิ่งที่น่าสนใจคือทั้งฝั่งโซเวียตและสหรัฐต่างรู้ตั้งแต่แรกว่าการ Tracking ไม่อาจอาศัยการฟัง “บี๊บ” ไปเรื่อย ๆ ได้ มันต้องมีโครงสร้างพื้นฐานที่เป็นระบบกว่านั้น สหรัฐจึงเริ่มสร้างเครือข่ายภาคพื้นขนาดใหญ่เพื่อรองรับการสื่อสารและติดตามยานอวกาศ ทั้งในโครงการ Mercury, Gemini, Apollo และที่สำคัญที่สุดคือการวางรากฐานของสิ่งที่เรารู้จักในปัจจุบันว่า Deep Space Network หรือ DSN
DSN เกิดขึ้นในปี 1958 โดย JPL เพื่อตอบโจทย์การติดต่อกับยานอวกาศที่บินไกลเกินกว่าจะใช้เรดาร์หรือสถานีธรรมดา เครือข่ายนี้มีสถานีสามแห่งวางห่างกัน 120 องศาบนผิวโลกได้แก่ที่ โกลด์สโตน ในแคลิฟอร์เนีย, มาดริด ที่สเปน, และแคนเบอร์รา ในออสเตรเลีย หลักการคือไม่ว่ายานจะอยู่ตรงไหนของท้องฟ้า ต้องมีอย่างน้อยหนึ่งสถานีที่มองเห็นยานได้ตลอดเวลา
เทคนิคที่ DSN ใช้ไม่ใช่แค่การรับสัญญาณเพื่อส่งข้อมูลอย่างเดียว แต่รวมถึงการทำ
- Two-Way Doppler Tracking ยิงสัญญาณไปที่ยาน ให้ยานส่งกลับมา แล้ววัด Doppler Shift เพื่อคำนวณความเร็วเชิงเส้นของยาน
- Ranging แทรกโค้ด Pseudo-Random Noise เข้าไปในสัญญาณ แล้ววัดเวลาที่สัญญาณเดินทางไป–กลับ เพื่อหาค่าระยะทางที่แม่นยำ
- VLBI หรือ Very Long Baseline Interferometry ใช้เสาอากาศหลายแห่งรับสัญญาณพร้อมกัน เพื่อตีมุมตำแหน่งของยานในท้องฟ้าให้ละเอียดถึงระดับมิลลิเมตร
พูดง่าย ๆ คือ DSN ไม่ได้ “ดู” ยานเหมือนกล้องโทรทรรศน์ แต่วัดทุกเศษเสี้ยวของสัญญาณวิทยุเพื่อเปลี่ยนเป็นข้อมูลตำแหน่งและความเร็ว ยิ่งเสาอากาศมีเส้นผ่านศูนย์กลางใหญ่ เช่น Goldstone 70 เมตร ก็ยิ่งสามารถดึงสัญญาณที่อ่อนมาก ๆ ออกมาจาก Noise ของจักรวาลได้

ในยุค Apollo เครือข่าย Tracking นี้กลายเป็นสิ่งจำเป็นที่ทำให้มนุษย์สามารถพายานไปลงจอดดวงจันทร์ได้จริง และเมื่อก้าวเข้าสู่ยุคของ Planetary Mission อย่าง Pioneer, Voyager, Cassini หรือ Juno เครือข่าย DSN ก็กลายเป็น “สะพานเชื่อม” เพียงหนึ่งเดียวระหว่างโลกกับยานที่กำลังเดินทางออกไปไกลเป็นพันล้านกิโลเมตร
การเดินทางในยุคแรกคือค่อย ๆ คลำหาทางไป
ในยุคแรกของการสำรวจอวกาศ ความท้าทายไม่ได้อยู่แค่การปล่อยจรวดให้ขึ้นสู่วงโคจร แต่คือการ “รักษา Trajactory ให้เข้าเป้า” ซึ่งเป็นโจทย์ที่อาศัยการคำนวณล้วน ๆ แทบไม่มีตัวช่วย Onboard เลย ความจริงก็คือ บ่อยครั้งมันก็พลาดแบบเจ็บปวด
ตัวอย่างคลาสสิกคือ Mariner 8 ของ NASA ในปี 1971 ที่ถูกออกแบบให้ไปโคจรรอบดาวอังคาร แต่ระบบจรวด Centaur ดันทำงานผิดพลาดหลังปล่อย ทำให้ Trajectory พัง ยานตกกลับมหาสมุทรแอตแลนติกทันที อีกเพียงไม่กี่เดือนต่อมา Kosmos 419 ของโซเวียตที่ตั้งใจจะไป Mars ก็ล้มเหลวเพราะจรวด Blok D ที่จะพายานออกจากวงโคจรโลกไม่ติดเครื่องตามแผน ยานเลยค้างอยู่แค่ Low Earth Orbit ก่อนตกกลับสู่ชั้นบรรยากาศ
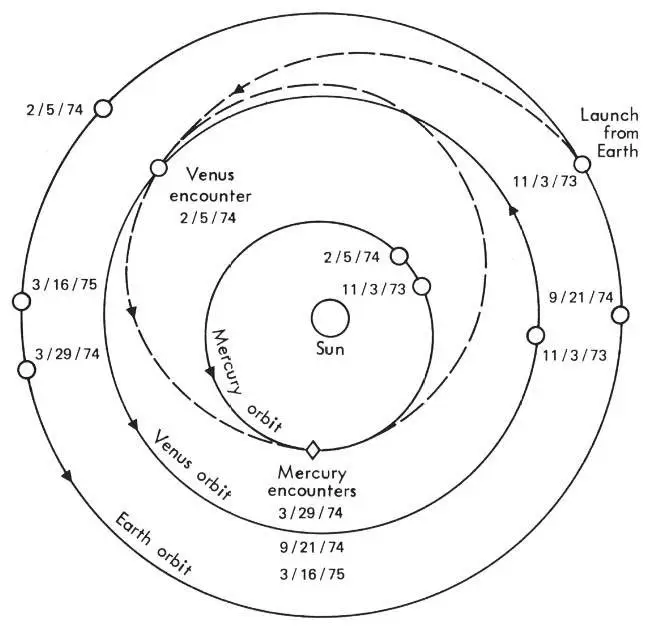
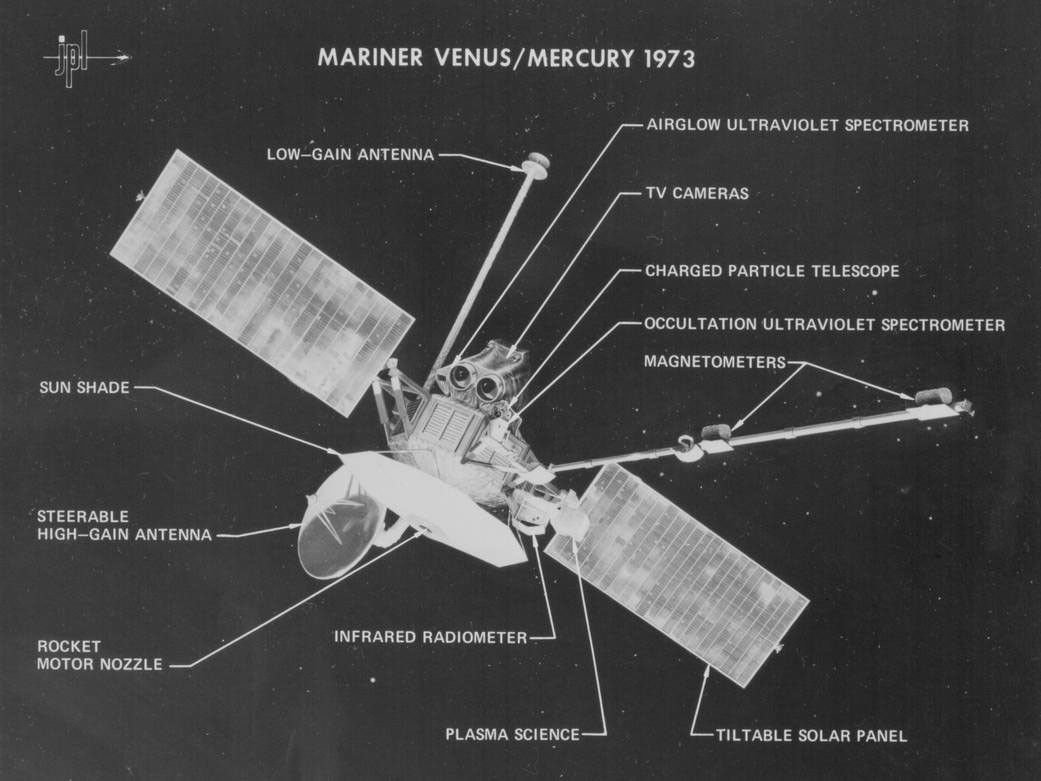
แม้แต่ภารกิจที่ดูเหมือนสำเร็จจริง ๆ ก็ยังสะท้อนความโหดของโจทย์นี้ เช่น Mariner 10 ปี 1973 ที่ถูกส่งไปดาวศุกร์ และดาวพุธ การจะทำให้ Trajectory เข้าใกล้ดาวพอดีต้องใช้ Gravity Assist จาก Venus ช่วยบังคับทิศ ถ้าคลาดไปเพียงไม่กี่ร้อยกิโลเมตร มันอาจไม่เฉียดพอที่จะเปลี่ยนเส้นทางไปดาวพุธ ได้เลย ความแม่นยำระดับนี้คือสิ่งที่ต้องพึ่งพา DSN และการติดตามการทำ Ranging จาก Mission Control แบบสุด ๆ
หรืออย่าง Pioneer Venus Orbiter ในปี 1978 ที่ Trajectory เข้าใกล้เกินไปเล็กน้อย จนทำให้ต้อง “จุดเครื่องยนต์” เกินกว่าที่วางแผนไว้เพื่อแก้ Trajectory ไม่งั้นอาจพุ่งเลยไปจากดาวศุกร์โดยตรง
ความผิดพลาดเหล่านี้ตอกย้ำว่า การส่งยานไปดาวเคราะห์ในยุคแรกคือการเล่นเกมที่เดิมพันสูงสุด ถ้าการคำนวณพลาดไปแม้เพียงเล็กน้อย หรือจรวดไม่สามารถส่งยานให้ออกไปด้วย Parameter ที่เป๊ะ ยานทั้งลำก็หมดอนาคตทันที ความเฟลพวกนี้เกิดขึ้นซ้ำแล้วซ้ำอีกตลอดทศวรรษ 1960–70 และเป็นบทเรียนว่าการ Tracking และการรู้ตำแหน่งยานอวกาศคือโจทย์ที่ยากพอ ๆ กับการสร้างจรวดเลยด้วยซ้ำ
หลักการทางเทคนิคของการจับตำแหน่งยานอวกาศ
ก่อนที่จะไปถึงยุคที่ใกล้เรามากขึ้น ขอเล่าให้ฟังในเชิง Technical ก่อนว่า แล้วหลักการทำ Doppler Tracking และ Ranging ที่ว่ามันทำงานอย่างไร และข้อมูลตัวแปรที่เราต้องรู้คืออะไรบ้าง
Doppler Tracking ใช้หลักการง่ายมากจากฟิสิกส์ คือถ้ายานเคลื่อนที่เข้าหาโลก ความถี่ที่รับได้จะสูงกว่าที่ส่งออกไป และถ้าเคลื่อนที่ออกห่าง ความถี่ก็จะต่ำลง ยานพวก Pioneer หรือ Voyager จะรับสัญญาณที่ส่งมาจาก DSN แล้วสะท้อนกลับด้วยความถี่ที่ปรับตามอัตราส่วนที่ตกลงกันไว้ เรียกว่า Coherent Transponding ทำให้เราวัด Doppler Shift ได้ละเอียดถึงระดับ Milli Hertz ซึ่งแปลออกมาเป็นความเร็ว Radial Velocity ที่แม่นยำในระดับ มิลลิเมตรต่อวินาที แนะนำให้อ่านใน Doppler Tracking of Planetary Spacecraft และ The PN Technique of Ranging as Applied in the Ranging Subsystem Mark I
ขณะที่ Ranging คือการวัด “ระยะทาง” โดยตรง DSN จะส่งสัญญาณที่ถูก Modulate ด้วยรหัสสุ่ม Pseudo-Random Code ไปยังยาน จากนั้นยานจะส่งกลับมา เมื่อโลกจับคู่รหัสได้ เราจะรู้ว่าเวลาที่สัญญาณใช้ในการเดินทางไป–กลับคือเท่าไหร่ แล้วหารด้วยสองเพื่อคำนวณระยะทาง ความละเอียดของการวัดนี้อยู่ในระดับ หลายเมตรถึงสิบเมตร แม้ยานจะอยู่ไกลเป็นร้อยล้านกิโลเมตรก็ตาม
ลองนึกภาพว่าเราเอาเสียง “ท่องสูตรคูณ” ใส่เข้าไปในคลื่นวิทยุเลยก็ได้ แบบ 2-4-6-8… พอส่งขึ้นไป ยานก็แค่ “พูดกลับมา” ตามที่รับไป เราก็จะได้ยินเสียงท่องสูตรคูณย้อนกลับมา ทีนี้เราก็เทียบได้ว่าตัวเลขมัน “เลื่อน” ไปเท่าไหร่ระหว่างต้นฉบับกับที่ยานสะท้อนกลับมา เลื่อนมากก็แปลว่ายานอยู่ไกล ใช้เวลาส่งกลับนาน ข้อดีคือ โค้ด PRN นี้มันมีเอกลักษณ์ ไม่ซ้ำกับสัญญาณรบกวนอื่น ๆ เพราะมันยาวและซับซ้อนพอ ทำให้เราจับคู่ได้แม่นว่า “นี่คือโค้ดของเราแน่ ๆ”
แต่ Doppler กับ Ranging อย่างเดียวไม่เพียงพอ เพราะมันให้ข้อมูลเพียง “ความเร็วในแนวตรง” และ “ระยะห่าง” ไม่ได้บอกมุมที่แน่ชัด ดังนั้นสิ่งที่วิศวกรต้องทำคือการสร้าง Trajectory Design และทำกระบวนการที่เรียกว่า Orbit Determination โดยเอาข้อมูล Doppler มารวมกับ Ranging จากหลายสถานี DSN ที่กระจายทั่วโลกมาฟิตเข้ากับแบบจำลองแรงโน้มถ่วงของดวงอาทิตย์ ดาวเคราะห์ และแรงกวนอื่น ๆ อย่าง Solar Radiation Pressure แล้วแก้สมการด้วยเทคนิคอย่าง Least Squares Estimation สิ่งที่ได้ออกมาคือเส้นทางการเคลื่อนที่ของยานในเชิงคณิตศาสตร์
Ephemeris การที่มนุษย์บันทึกตำแหน่งของวัตถุบนท้องฟ้า
เส้นทางที่ว่านี้ก็คือสิ่งที่เราเรียกว่า Ephemeris ตารางหรือชุดข้อมูลที่บอกตำแหน่งและความเร็วของยานในช่วงเวลาต่าง ๆ มันคือ “พิกัดชีวิต” ของยานอวกาศทุกลำ
คำว่า Ephemeris มาจากภาษากรีก Ephemeris ที่แปลว่า “สิ่งที่มีขึ้นเพียงวันเดียว” แต่ในวิทยาศาสตร์อวกาศมันหมายถึง “ชุดข้อมูลที่บอกตำแหน่งและความเร็วของวัตถุท้องฟ้า ณ เวลาใดเวลาหนึ่ง” พูดให้ง่ายที่สุด Ephemeris คือ “พิกัดที่เวลา” ของยานอวกาศ ดาวเคราะห์ หรือแม้แต่ดาวเทียมที่โคจรรอบโลก มันไม่ใช่เพียงตัวเลขตำแหน่งสามมิติ แต่รวมถึงความเร็วเชิงเวกเตอร์ ที่ใช้ในการทำนายว่าในอีก 1 ชั่วโมง 1 วัน หรือ 1 ปี วัตถุนั้นจะอยู่ตรงไหนบนฟ้า
ยกตัวอย่างใกล้ตัวที่สุดคือ JPL Horizons System ที่นักดาราศาสตร์ทั่วโลกใช้ ซึ่ง ณ วันที่เขียนบทความนี้ มีการเก็บ Ephemeris ของดาวเคราะห์ 8 ดวง ดวงจันทร์บริวารอื่น ๆ อีก 423 ดวง ดาวเคราะห์น้อย 1,461,943 ดวง ดาวหาง 4,030 ดวง (ซึ่งถ้าใครเป็นนักดาราศาสตร์จะทำแอพดูดวง แนะนำให้ดึงเอามาใช้เพราะดวงจะแม่นยำมาก)
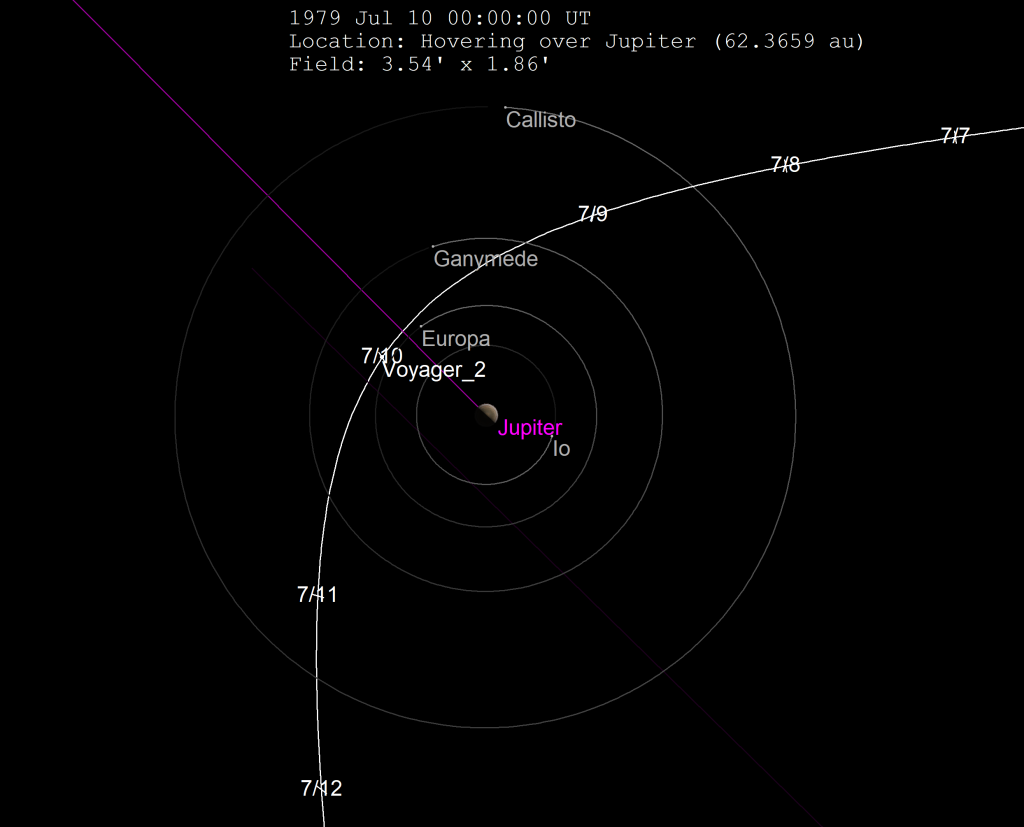
เวลาที่เราจะส่องกล้องดูดาวเคราะห์น้อย หรือส่งยานไปเฉียดดาวเคราะห์ เราไม่ได้เดาสุ่ม แต่เราเรียกใช้ Ephemeris ที่ JPL คำนวณไว้แล้วเพื่อบอกพิกัดท้องฟ้าอย่างละเอียด เช่น “ดาวพฤหัสบดีจะอยู่ที่ Right Ascension 21 ชั่วโมง 12 นาที และ Declination ลบ 16 องศา 14 ลิปดา” ในวันที่เราสนใจ ซึ่งตัวเลขเหล่านี้ก็มาจากกระบวนการเดียวกันกับที่ใช้วัด Trajectory ของยานอวกาศ
สำหรับยาน Pioneer 10 นั้น Ephemeris จะบันทึกว่าหลังจากปล่อยเมื่อปี 1972 มันเดินทางออกจากโลกด้วยความเร็ว 14 กิโลเมตรต่อวินาที และจะเฉียดดาวพฤหัสบดีในเดือนธันวาคม 1973 ที่ระยะใกล้สุด 132,000 กิโลเมตร ตัวเลขเหล่านี้ไม่ได้ “เดา” แต่ได้มาจาก Doppler, Ranging และการแก้สมการแรงโน้มถ่วงของระบบสุริยะ เมื่อ Trajectory จริงตรงกับ Ephemeris ที่คำนวณไว้ นั่นคือความสำเร็จ
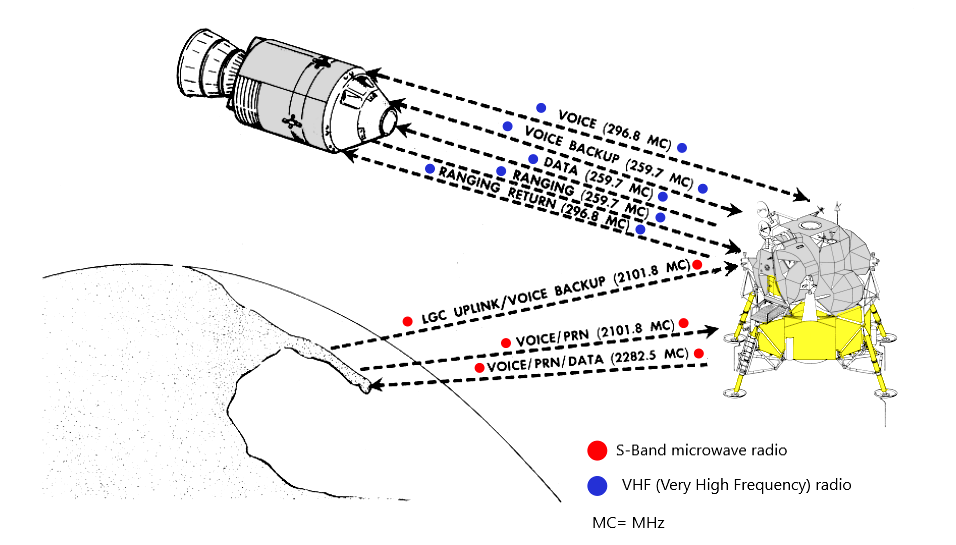
หรือในกรณีของ Apollo 11 ทีมงานใน Mission Control ต้องใช้ Ephemeris ของทั้งยานแม่ Command Module และ Service Module กับยานลงจอด Lunar Module เพื่อคำนวณเส้นทาง Lunar Orbit Rendezvous การรู้พิกัดกับความเร็วของแต่ละยานในเวลาจริง ๆ จึงเป็นสิ่งที่ทำให้การนัดเจอบนวงโคจรดวงจันทร์สำเร็จโดยไม่มีการคลาดเคลื่อน
พูดอีกแบบ ถ้าไม่มี Ephemeris เราจะไม่รู้เลยว่ายาน Voyager 1 วันนี้อยู่ที่ห่างไปกี่กิโลเมตรจากโลก กำลังเคลื่อนที่ออกไปด้วยความเร็ว 17 กิโลเมตรต่อวินาที และหันจานอากาศกลับมาทางไหนเพื่อส่งสัญญาณ Ephemeris คือ “แผนที่ชีวิต” ของทุกภารกิจอวกาศ และเป็นสะพานที่เชื่อมความแน่นอนเล็ก ๆ ของคณิตศาสตร์เข้ากับความเวิ้งว้างไร้ที่สิ้นสุดของจักรวาล
และเมื่อฐานข้อมูลใหญ่ขึ้น เราก็รู้จักที่จะสร้าง SPICE
เมื่อเรามี Ephemeris ของยานอวกาศแล้ว เราก็เหมือนมี “พิกัดเวลา” ที่จะบอกว่าในแต่ละวินาทียานอยู่ที่ไหนและกำลังวิ่งไปทางใด แต่ปัญหาที่เกิดขึ้นเมื่อการสำรวจอวกาศก้าวหน้ามากขึ้นก็คือ ข้อมูลเหล่านี้มันไม่ได้มีแค่ “ตำแหน่งยาน” เท่านั้น ยานทุกลำยังมีทิศทางที่มันหันไปคือ Orientation, เครื่องมือที่มันติดตั้งคือ Instrument Geometry, เวลาเปิดรับแสง Timing และการชี้ไปที่วัตถุท้องฟ้าซึ่งก็เคลื่อนที่ตามแรงโน้มถ่วงของระบบสุริยะด้วย
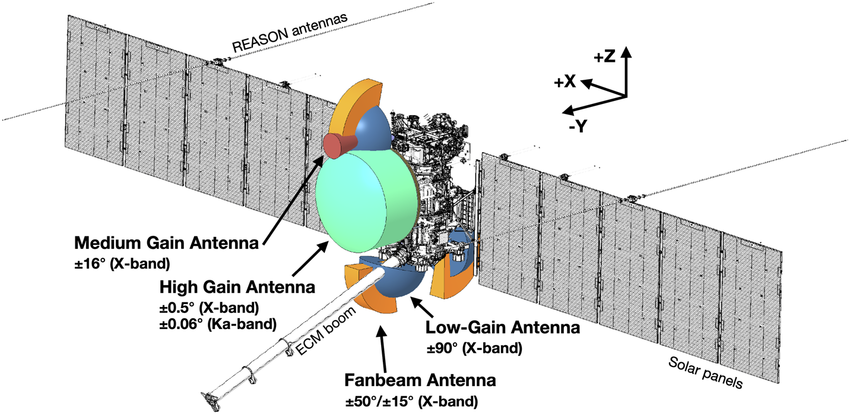
ทุกยานอวกาศจะถูกนิยามด้วย กรอบพิกัด หรือ Reference Frame ของมันเอง ซึ่งกำหนดแกน X, Y, Z เอาไว้ชัดเจน เช่น แกน X อาจชี้ไปทางจานสื่อสาร, แกน Z อาจชี้ตามแนวกล้องหลัก หรือแกน Y อาจตั้งฉากกับแผงโซลาร์ ขึ้นอยู่กับการออกแบบ ภายในกรอบพิกัดนี้เราจะอ้างอิงได้ว่าเครื่องมือหันไปทางไหน, Thruster แต่ละตัวชี้ทิศใด, และท่าทางของยาน (Attitude ที่เราได้ยินในคำว่า Attitude ในที่นี้ไม่ได้หมายถึงความสูง ที่หลายคนอาจะฟังผิดเป็น Altitude แค่คือท่าทางทิศทางของยาน) เป็นอย่างไร เมื่อนำกรอบนี้ไปประกอบกับข้อมูล Ephemeris และ SPICE เราก็จะแปลงได้ทันทีว่าภาพที่กล้องถ่ายมาตรงกับตำแหน่งบนดาวเคราะห์ หรือแรงที่ Thruster สร้างขึ้นส่งผลต่อ Trajectory ของยานอย่างไร
ลองนึกภาพยาน Europa Clipper ที่จะไปโคจรรอบดาวพฤหัสบดี มีกล้องหลายตัวชี้ไปคนละทิศ เวลาที่มันถ่ายภาพดวงจันทร์ Europa เราไม่ได้อยากรู้แค่ว่าภาพนี้สวยหรือไม่ แต่ต้องรู้ด้วยว่า พิกเซลแต่ละจุด บนภาพนั้นสอดคล้องกับพิกัด Latitude Longitude ไหน และถ้าอยากรวมภาพหลายพันภาพเข้าด้วยกันเป็นแผนที่ เราต้องอาศัยระบบที่บันทึก Geometry อย่างละเอียด
ตรงนี้เอง JPL จึงสร้างสิ่งที่เรียกว่า SPICE Toolkit ขึ้นมาในช่วงทศวรรษ 1980 ภายใต้การดูแลของ Navigation and Ancillary Information Facility หรือ NAIF ที่ JPL โครงสร้างของ SPICE ออกแบบให้เก็บข้อมูลทุกอย่างที่เกี่ยวกับภารกิจอวกาศในรูปแบบ “Kernel Files” ซึ่งแบ่งประเภทชัดเจน เช่น
- SPK หรือ Spacecraft and Planet Kernel เก็บ Ephemeris หรือ Trajectory ของยานและวัตถุท้องฟ้า
- CK หรือ C-matrix Kernel เก็บ Orientation ของยานและเครื่องมือ
- IK sหรือ Instrument Kernel เก็บ Geometry ของอุปกรณ์ เช่น Field of View ของกล้อง
- FK Frame Kernel เกี่ยวกับระบบพิกัดอ้างอิง
- SCLK หรือ Spacecraft Clock Kernel การแปลงเวลายานกับเวลาบนโลก
นักวิทยาศาสตร์สามารถโหลดไฟล์เหล่านี้เข้าไปในซอฟต์แวร์ SPICE แล้วถามคำถามเชิง Geometry ได้ตรง ๆ เช่น “ในวันที่ 15 กันยายน 2017 เวลา Cassini ชนชั้นบรรยากาศดาวเสาร์ กล้อง NAC ของมันชี้ไปที่มุมใด และพิกเซลกลางภาพกำลังมอง Longitude Latitude ตรงไหนของดาวเสาร์”
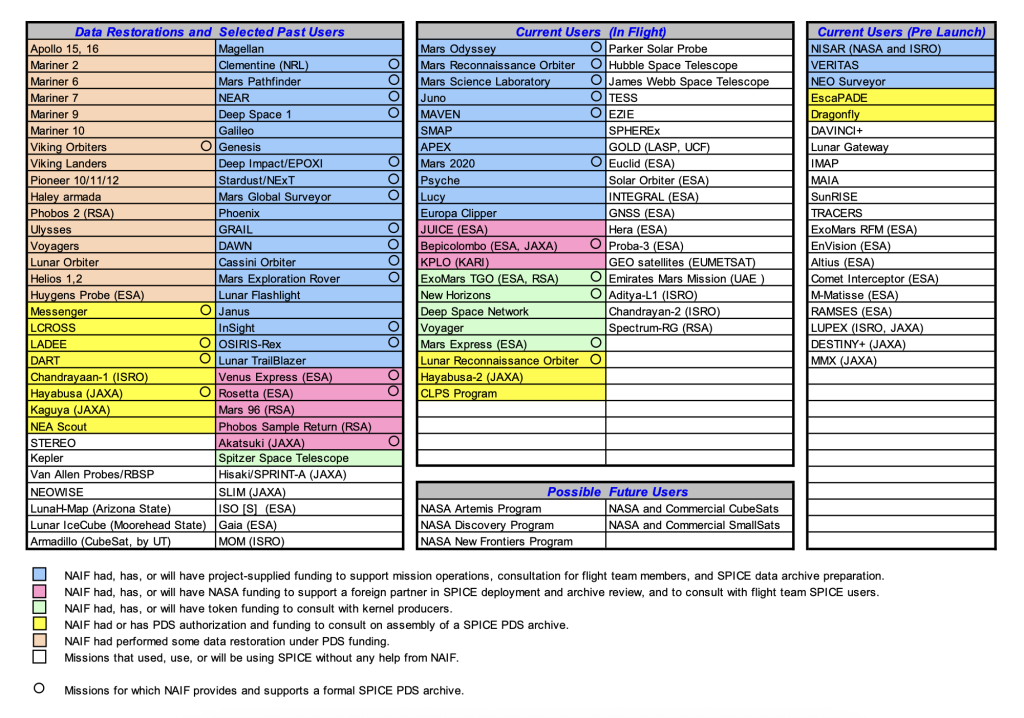
SPICE จึงไม่ใช่แค่ฐานข้อมูล แต่เป็น มาตรฐานกลางของการวิเคราะห์ข้อมูลอวกาศ ที่ทำให้ภารกิจ Voyager, Galileo, Cassini, Juno, New Horizons ไปจนถึงภารกิจดาวเคราะห์น้อยอย่าง OSIRIS-REx สามารถแชร์ Geometry Data ที่สอดคล้องกันได้ทั่วโลก วันนี้ถ้าเราเห็นภาพดาวพฤหัสบดี, วงแหวนเสาร์, หรือการบินเฉียดดาวพลูโต ที่นักวิทยาศาสตร์วิเคราะห์ออกมาเป็นแผนที่ละเอียด สิ่งนั้นเกิดขึ้นได้เพราะมี SPICE เป็นรากฐานที่รวม Ephemeris เข้ากับทุกองค์ประกอบของยาน ผู้ที่ทำ Mission Design ก็จะต้องเอาข้อมูลพวกนี้มาทำเป็น Trajectory ของภารกิจ เช่น Trajectory design for the Europa Clipper mission concept นั่นเอง
Epoch และการกำหนดจุดเริ่มต้นของเวลาอ้างอิง
Epoch คือแนวคิดของการสร้าง “จุดเริ่มต้นของเวลา” สักหนึ่งจุด แล้วนับทุกวินาทีจากตรงนั้นออกมา ตัวอย่างที่ใกล้ตัวที่สุดคือ Unix Timestamp ที่วงการคอมพิวเตอร์ใช้กันมาตั้งแต่ปี 1970 โดยกำหนดให้ 1 มกราคม 1970 เวลา 00:00:00 UTC เป็น Epoch จากนั้นทุกเวลาบนโลกดิจิทัลก็จะถูกแทนด้วย “จำนวนวินาทีที่ผ่านไป” นับจากจุดนั้น เช่น วันที่ 1 มกราคม 2000 จะมีค่าเป็น 946684800 ถ้าอ่านตรง ๆ อาจดูเหมือนตัวเลขไร้ความหมาย แต่เพราะทุกคนตกลงกันว่าจุดเริ่มคือ 1970 เลขนี้จึงถูก Decode กลับมาเป็นวันเวลาได้เสมอ
หลักคิดเดียวกันนี้ถูกใช้ในวงการอวกาศ แต่ยานอวกาศไม่สามารถ “นับวันเดือนปีตามปฏิทินโลก” ได้ตรง ๆ เพราะโลกหมุนรอบตัวเอง มี Leap Second ปรับนาฬิกา และระบบเวลาเต็มไปด้วยความซับซ้อนที่ Onboard Computer ไม่ควรต้องแบก ดังนั้นวิธีแก้คือการกำหนด Spacecraft Epoch ขึ้นมา เช่น ยานจะตั้ง Epoch ของตัวเองที่ “เวลาเปิดเครื่องครั้งแรก” หรือ “เวลาที่เริ่มภารกิจ” แล้วให้นาฬิกาของยานนับไปเรื่อย ๆ
ค่าที่นับได้นี้คือ SCLK หรือ Spacecraft Clock ซึ่งเป็นเหมือนตัวเลขเคาน์เตอร์ที่เดินไปเรื่อย ๆ บนยาน มันมีความสัมพันธ์เกือบตรงกับ SCET หรือ Spacecraft Event Time หรือ “เวลาเหตุการณ์บนยาน” ที่นิยามเทียบกับ UTC แต่เพราะ SCLK มีโอกาส Drift ได้ จึงต้องมีการสร้างไฟล์ SCLK/SCET Coefficients คอยอัปเดตเพื่อบอกว่า SCLK ตอนนี้เลื่อนไปจากมาตรฐาน UTC แค่ไหน
ฝั่งทีมงานภาคพื้นจะใช้ Kernel ของระบบ SPICE โดยเฉพาะ Spacecraft Clock Kernel เพื่อแปลงค่าของ SCLK กลับไปสู่มาตรฐานเวลาสากล เช่น TDB หรือ Barycentric Dynamical Time หรือ UTC เพื่อเชื่อมกับ Ephemeris ของดาวเคราะห์และยานอื่น ๆ ได้ การแปลงนี้จำเป็นเพราะเวลาที่เราพูดถึง “เหตุการณ์บนยาน” จะต้องถูกสัมพันธ์กับเวลาที่โลกเข้าใจได้ เช่นเวลาส่งสัญญาณ TRM หรือ Transmission Time เวลาที่สัญญาณใช้เดินทาง OWLT หรือ One-Way Light Time หรือเวลาที่โลกได้รับข้อมูลจริง ERT หรือ Earth-Received Time
ในทางปฏิบัติ สมการพวกนี้ทำงานเชื่อมกันเป็นโซ่ เช่น SCET = TRM + OWLT (เวลาเหตุการณ์บนยานเท่ากับเวลาส่งสัญญาณจากโลกบวกด้วยเวลาที่แสงเดินทางไปถึงยาน) ERT = SCET + OWLT (เวลาเหตุการณ์บนโลกที่ได้รับข้อมูลคือเวลาเหตุการณ์บนยานบวกด้วยเวลาที่แสงเดินทางกลับมา)
ทั้งหมดนี้ทำให้เราสามารถ “Mapping” เหตุการณ์หนึ่ง ๆ จาก onboard clock ของยานกลับมาเป็นเวลาสากลที่สัมพันธ์กับการเคลื่อนที่ของโลกและดาวเคราะห์อื่น ๆ ได้อย่างแม่นยำ ถ้าไม่ทำแบบนี้ การสื่อสารกับยานที่อยู่ห่างออกไปหลายร้อยล้านกิโลเมตรอย่าง Voyager 1 หรือแม้แต่การคำนวณวงโคจรของดาวเทียมใกล้โลกก็คงเต็มไปด้วยความสับสน สามารถศึกษาได้จาก NAIF Reference Frames
เมื่อยานอวกาศฉลาดขึ้นและอุปกรณ์ที่หลากหลาย
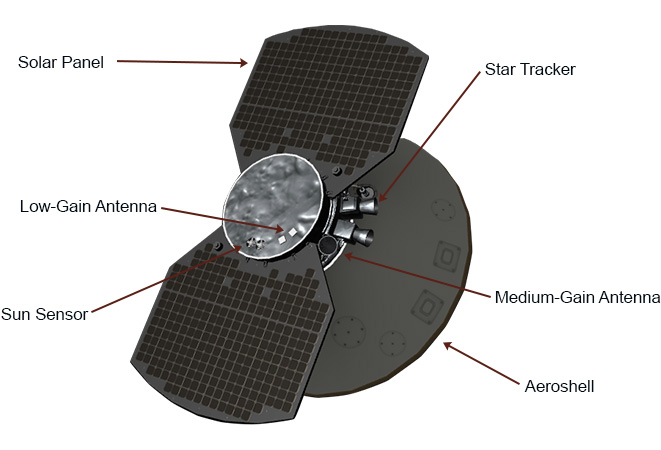
เมื่อพูดถึงการที่ยานอวกาศเริ่ม “ฉลาดขึ้น” สิ่งที่ต้องกล่าวถึงก่อนคือ Star Tracker อุปกรณ์ที่ทำหน้าที่เหมือนตาของยานในการรู้ว่าตัวเองหันไปทางไหน หลักการทำงานของมันคือการใช้กล้อง CCD หรือ CMOS ถ่ายภาพท้องฟ้า แล้วนำจุดสว่างที่ได้มาแยกแยะว่าเป็นดาวดวงใดบ้าง
ประวัติศาสตร์ของการใช้ Star Tracker นั้นค่อนข้างน่าสนใจ ก่อนหน้านั้นยานสำรวจของทั้งโซเวียตและสหรัฐมักใช้การหมุนรอบตัวเองหรือ Spin-Stabilized เพื่อรักษาเสถียรภาพ มันง่ายแต่ขาดความยืดหยุ่นในการชี้กล้องหรือเครื่องมือไปยังเป้าหมายที่ต้องการได้ตลอดเวลา ก้าวแรกที่พลิกเกมเกิดขึ้นกับ Venera 1 ของสหภาพโซเวียตที่ปล่อยเมื่อ 1961 ซึ่งถือเป็นยานลำแรกที่ติดตั้งระบบควบคุมท่าทางแบบ 3 Axis Stabilization โดยใช้อุปกรณ์สองตัวร่วมกันคือ Sun Sensor กับ Star Tracker หลักการคือให้เซนเซอร์ดวงอาทิตย์หันทิศเริ่มต้นหรือ Coarse Orientation จากนั้นให้ Star Tracker จับดาวดวงหนึ่งบนท้องฟ้าเพื่อเป็น Reference ที่นิ่งและแม่นยำมากพอสำหรับการคุมท่าทางในระยะยาว

ดาวที่ถูกเลือกก็คือ Canopus ซึ่งอยู่ห่างออกไปราว 310 ปีแสง และเป็นดาวที่สว่างเป็นอันดับสองบนท้องฟ้าราตรี รองจาก Sirius ความโดดเด่นของ Canopus คือมัน อยู่ค่อนข้างโดดเดี่ยว บนท้องฟ้า ไม่แออัดกับดาวสว่างอื่น ๆ ทำให้กล้อง Star Tracker ที่ความละเอียดไม่สูงนักในยุคนั้นสามารถแยกมันออกได้ง่าย และที่สำคัญคือมัน อยู่ใกล้แนวระนาบสุริยวิถีในตำแหน่งที่มักเห็นได้เกือบตลอดการเดินทางระหว่างดาวเคราะห์ จึงเป็นตัวเลือกที่แทบจะสมบูรณ์แบบ สำหรับใช้เป็นดาวนำทางของยานยุคแรก
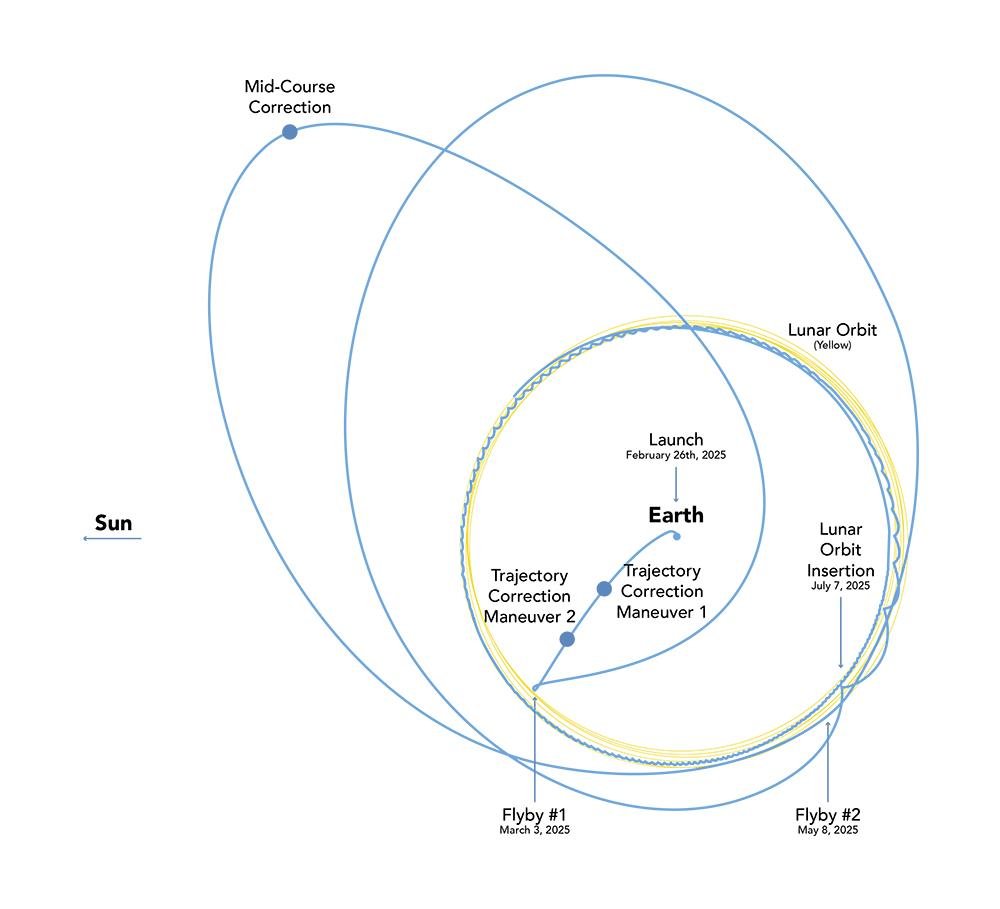
แม้ Venera 1 จะสูญเสียการติดต่อก่อนถึงดาวศุกร์ แต่แนวคิดนี้ถูกต่อยอดโดย NASA ใน Mariner 2 ซึ่งปล่อยเมื่อปี 1962 เพื่อบินเฉียดดาวศุกร์ Mariner 2 ใช้ Sun Sensor คุมให้ยานหันแผงโซลาร์เข้าหาดวงอาทิตย์อย่างต่อเนื่อง และใช้ Star Tracker ที่ “ล็อก” ไปที่ Canopus เช่นเดียวกับโซเวียต เพื่อสร้าง Attitude Reference ที่มั่นคงพอจะทำการปรับ Trajectory ระหว่างทาง ที่เรียกว่าการทำ Mid-Course Corrections ได้อย่างแม่นยำ นี่จึงเป็นครั้งแรกที่ NASA ใช้ Celestial Navigation อย่างจริงจังสำหรับ Deep Space Mission และผลลัพธ์ก็คือ Mariner 2 ประสบความสำเร็จในการเป็นยานแรกที่บินเฉียดและสำรวจดาวศุกร์ได้สำเร็จ
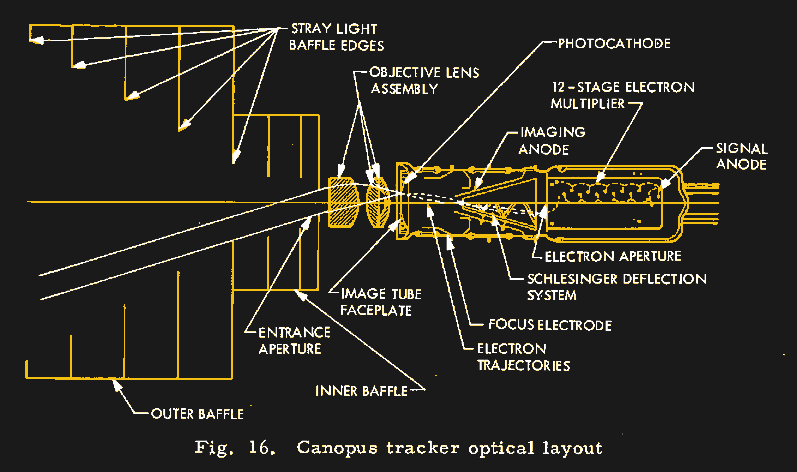
การเลือก Canopus จึงเป็นทั้งการแก้โจทย์เชิงเทคนิคและเชิงประวัติศาสตร์ มันสว่างพอที่เซนเซอร์ Primitive จะตรวจจับได้ชัด อยู่ในตำแหน่งท้องฟ้าที่เป็นประโยชน์ต่อการเดินทางระหว่างดาวเคราะห์ และที่สำคัญ มันกลายเป็น “มาตรฐานไม่เป็นทางการ” ของยานยุคแรกหลายลำที่จะใช้ Canopus เป็นเหมือน “เสาเข็ม” ของท้องฟ้าในการบอกทิศ เหมือนกับที่มนุษย์เราใช้ Polaris ในการบอกทิศเหนือ โดยรายละเอียดในเชิง Technical สามารถอ่านได้ที่ Digital Canopus Tracker Digital Electronics และ Mariner Mars 1971 Attitude Control Subsystem
ทุกวันนี้ Star Tracker ฉลาดกว่ายุค Venera หรือ Mariner มากจนแทบไม่ต้องอ้างอิงกับดาวสว่างดวงใดดวงหนึ่งอีกต่อไปแล้ว เพราะคอมพิวเตอร์บนยานอวกาศมีพลังประมวลผลสูงพอที่จะจับภาพท้องฟ้ากว้าง ๆ แล้วทำ Pattern Recognition เปรียบเทียบกับ Star Catalog ที่มีดาวนับหมื่นดวงได้แบบ Real-Time ยานไม่จำเป็นต้อง “ล็อก” กับ Canopus อย่างเดียวเหมือนเมื่อหกสิบปีก่อนอีกแล้ว จากนั้นระบบ Onboard Computer จะเปรียบเทียบกับ Star Catalog ที่เก็บไว้ในหน่วยความจำ แล้วแก้โจทย์ทางคณิตศาสตร์ที่เรียกว่า Wahba’s Problem เพื่อหา Attitude ของยานในรูปแบบควอเทอร์เนียนหรือเมทริกซ์แปลงพิกัด เรียกว่า Statistical Attitude Determination ข้อมูลนี้ช่วยให้ยานรู้ว่าตัวเองหันไปทางไหนในกรอบ Body Frame เมื่อเทียบกับกรอบ Inertial Frame การทำงานแบบนี้ให้ความแม่นยำระดับไม่กี่ Arcsecond ซึ่งถือว่าละเอียดมากพอสำหรับการหันกล้องถ่ายภาพดาวเคราะห์หรือเล็งจานสื่อสารกลับโลก

ส่วน Sun Sensor ซึ่งแม้จะไม่ละเอียดเท่า Star Tracker แต่กลับมีความเรียบง่ายและทนทานสูง หลักการทำงานก็ตรงไปตรงมา ใช้โฟโตไดโอดหรือ CCD วัดทิศทางของดวงอาทิตย์ในขอบเขตการมองหรือ Field of View อุปกรณ์ประเภท Coarse Sun Sensor จะให้ค่าคร่าว ๆ ในระดับองศา ส่วน Fine Sun Sensor จะบอกได้ละเอียดถึงไม่กี่ลิปดา จุดแข็งของมันคือทำงานได้เสมอแม้ในสภาวะที่ Star Tracker อาจใช้ไม่ได้ เช่น เมื่อถูกแสงสะท้อนรบกวน หรือในขั้นตอน Recovery หลังยานสูญเสียท่าทาง การรู้ทิศทางของดวงอาทิตย์ยังเป็นสิ่งจำเป็นสำหรับการควบคุมพลังงานและความร้อนของยานด้วย
ข้อมูลจาก Star Tracker และ Sun Sensor จะถูกนำมาผสานเข้ากับเซนเซอร์อื่น ๆ เช่น Gyroscope ผ่านตัวกรองอย่าง Extended Kalman Filter หรือ EKF ค่านี้จะถูกส่งไปยังระบบ Attitude Control System เพื่อตัดสินใจว่าจะสั่งให้ Reaction Wheels หมุนหรือให้ Reaction Control Thruster อย่างไรบนแกน X-Y-Z ของยาน เพื่อรักษาการชี้เป้าไปในทิศที่ต้องการ ความแม่นยำของระบบนี้จึงเป็นรากฐานทั้งในการถ่ายภาพ การสื่อสาร และการควบคุมเสถียรภาพโดยรวมของภารกิจ
เมื่อการสำรวจอวกาศซับซ้อนขึ้น เราไม่เพียงต้องรู้ทิศทาง แต่ยังต้องรู้ตำแหน่งสัมพัทธ์ของยานกับวัตถุเป้าหมายในแบบ Real-Time นั่นคือที่มาของ Optical Navigation หรือ OpNav หลักการคือการใช้ภาพจากกล้องนำทางหรือกล้องวิทยาศาสตร์มาเป็น “การวัด” เส้นสายตา Line-of-sight ไปยังดาวเคราะห์ ดวงจันทร์ หรือวัตถุขนาดเล็ก เช่น ดาวหางและดาวเคราะห์น้อย หรือแม้กระทั่งยานอวกาศลำอื่น ๆ แต่ละพิกเซลบนภาพจะถูกแปลงผ่านการคาลิเบรตกล้องให้กลายเป็นทิศทางในกรอบพิกัดของกล้อง และเมื่อรวมเข้ากับท่าทางของยานที่ได้จาก Star Tracker ก็จะได้ทิศทางไปยังวัตถุใน Inertial Frame
ข้อจำกัดของ Optical Navigation คือมันให้ “ทิศ” แต่ไม่ให้ “ระยะ” ดังนั้นในหลายกรณีจึงต้องผสานกับข้อมูล Radiometric อย่าง Doppler และ Ranging หรือใช้เครื่องมือเสริม เช่น LIDAR, Laser Altimeter หรือ Stereo Imaging เพื่อแก้ปัญหาสเกล โดยเฉพาะช่วงเข้าใกล้พื้นผิวที่ต้องการข้อมูลระยะทางและอัตราเร็วอย่างแม่นยำ การรวมกันของข้อมูลจาก Star Tracker, Sun Sensor, Optical Navigation และ Radiometric จึงกลายเป็น Backbone ของการนำทางสมัยใหม่ ที่ทำให้ยานอวกาศสามารถปฏิบัติภารกิจซับซ้อนอย่างการโคจรรอบดาวเคราะห์น้อยหรือการลงจอดบนวัตถุขนาดเพียงไม่กี่กิโลเมตรได้สำเร็จ
Trajectory Correction Maneuver แก้ไขเส้นทางระหว่างเดินทาง
ต่อให้เรามีการคำนวณ Trajectory ที่แม่นยำแค่ไหนก็ตาม แต่ความจริงของการบินอวกาศคือ ไม่มีการปล่อยครั้งไหนที่สมบูรณ์แบบ 100% จรวดอาจส่งยานออกไปด้วยความเร็วคลาดเพียงไม่กี่เมตรต่อวินาที หรือมุมยิงเพี้ยนไปเสี้ยวองศา แต่พอระยะทางสะสมเป็นหลายร้อยล้านกิโลเมตร ความคลาดเล็กน้อยนั้นสามารถทำให้ยานพลาดเป้าไปเป็นพันล้านกิโลเมตรได้ทันที นี่คือเหตุผลที่ทุกภารกิจจำเป็นต้องมีสิ่งที่เรียกว่า Trajectory Correction Maneuver หรือการแก้เส้นทางระหว่างทาง
หลักการคือเมื่อเราสร้าง Ephemeris จากข้อมูล Doppler, Ranging และ Optical Navigation แล้ว เราจะรู้ว่ายาน “จริง ๆ” กำลังไปในเส้นทางไหน เทียบกับ “เส้นทางที่ควรจะไป” จาก Trajectory Design ของภารกิจ ความต่างระหว่างสองเส้นนี้ถูกแปลงเป็นการ Burn ขนาดเล็กด้วย Thruster หรือ Main Engine ของยาน หรือมี Delta-V น้อยมาก ๆ แต่เพียงพอที่จะเลื่อนจุด Encounter ออกไปเป็นหมื่นหรือแสนกิโลเมตรในอนาคต ภารกิจอย่าง Voyager 2 เองยังมีการแก้เส้นทางหลายครั้งตลอดการ Grand Tour ผ่านดาวพฤหัส ดาวเสาร์ ยูเรนัส และเนปจูน ซึ่งแต่ละครั้งเป็น Burn เล็ก ๆ เพียงวินาทีถึงไม่กี่สิบวินาที แต่มีผลต่อการวาง “ตารางนัดหมาย” กับดาวเคราะห์ทั้งดวงในอีกหลายปีข้างหน้า
ใครที่อินเรื่องนี้มาก ๆ แนะนำให้อ่านบทความเรื่อง Trajectory Design and Optimization ศาสตร์เบื้องหลังการออกแบบเส้นทางการสำรวจอวกาศ
Gravity Assists รู้ได้อย่างไรว่าถูก
หนึ่งในเทคนิคที่พลิกหน้าประวัติศาสตร์การสำรวจอวกาศคือ Gravity Assist หรือการใช้แรงโน้มถ่วงของดาวเคราะห์ช่วยเปลี่ยนความเร็วและทิศทางของยานอวกาศโดยไม่ต้องใช้เชื้อเพลิงเพิ่ม วิธีนี้ถูกใช้ครั้งแรกกับ Mariner 10 ในปี 1974 ที่ใช้ดาวศุกร์บูสต์ตัวเองไปหาดาวพุธ และกลายเป็นมาตรฐานที่ Voyager, Galileo, Cassini ไปจนถึง New Horizons ใช้ซ้ำแล้วซ้ำเล่า แต่โจทย์สำคัญคือ เราจะรู้ได้อย่างไรว่าการโฉบผ่านนั้น “ถูกต้อง” ไม่พลาดเป้า
คำตอบคือทุกอย่างก็กลับมาอยู่ที่ Ephemeris และการวัด Trajectory ก่อนถึงดาวเคราะห์เป้าหมาย ยกตัวอย่าง Voyager 2 ที่ต้องโฉบผ่านดาวพฤหัสบดี ที่ระยะใกล้สุด 650,000 กิโลเมตร ถ้า Trajectory คลาดไปเพียงไม่กี่ร้อยกิโลเมตรตอนเข้าใกล้ แทนที่จะพุ่งออกไปหาดาวเสาร์ มันอาจเบี่ยงไปเป็นเส้นทางที่พลาดทั้งทริป Grand Tour เลยก็ได้ ดังนั้นก่อน Flyby หลายสัปดาห์ ทีมงานจะใช้ข้อมูล Doppler และ Ranging จาก DSN มาวิเคราะห์ Trajectory แล้วเปรียบเทียบกับ Ephemeris ของดาวเคราะห์ (ซึ่งเราคำนวณตำแหน่งของดาวพฤหัสบดี หรือ ดาวเสาร์ ได้แม่นในระดับไม่กี่กิโลเมตร) ถ้าพบว่ายานจะเข้า Flyby “ตื้นไป” หรือ “ลึกไป” ก็จะสั่ง Trajectory Correction Maneuver เล็ก ๆ ปรับทางให้แน่นอน
ในทางปฏิบัติ วิธีตรวจสอบว่า Flyby ถูกต้องทำได้จากการวัด B-plane targeting ซึ่งเป็นการฉาย Trajectory ของยานลงบนระนาบที่ตั้งฉากกับเส้นทางเข้า Incoming Asymptote ของมัน การกำหนดพิกัดใน B-plane บอกได้ว่ายานจะเฉียดผ่านดาวเคราะห์ที่ตำแหน่งไหน Impact parameter, Aim point และมุมใด การปรับเพียง Delta-V หลักเมตรต่อวินาทีทำให้พิกัดบน B-plane ขยับไปเป็นพันกิโลเมตร ซึ่งกำหนดว่า Flyby จะให้ Gravity Assist ในทิศที่ถูกหรือไม่
เมื่อยานผ่านใกล้ดาวเคราะห์จริง ๆ เรารู้ได้ทันทีจากการวัด Doppler Shift ของสัญญาณวิทยุที่เปลี่ยนตามความเร็วของยาน หาก Trajectory เป็นไปตามแผน เราจะเห็นเส้น Doppler Curve ที่ตรงกับ Prediction ของ Ephemeris เป๊ะ ความต่างระหว่าง “ของจริง” กับ “ที่คาด” จะเล็กมากในช่วงใกล้ที่สุด Closest Approach ถ้ามันตรงกัน เราก็มั่นใจได้ว่ายานได้รับพลังงานและทิศทางจาก Gravity Assist ตามที่ออกแบบไว้
พูดอีกแบบการรู้ว่า Gravity Assist ถูกหรือไม่ ไม่ได้เกิดขึ้นตอนที่มัน “โฉบ” จริง ๆ แต่เกิดจากการคำนวณ Trajectory และการตรวจสอบ Doppler และ Ranging ล่วงหน้าว่าทางที่ยานจะเข้ามันพาไปสู่ B-plane ที่ต้องการหรือไม่ เมื่อเส้นทางจริงกับเส้นทางคาดตรงกัน เราก็รู้ทันทีว่ายานถูกเหวี่ยงไปสู่เป้าหมายถัดไปตามที่ตั้งใจไว้
ตัวอย่างภารกิจโคตรเท่ที่สะท้อนการเดินทางในอวกาศ
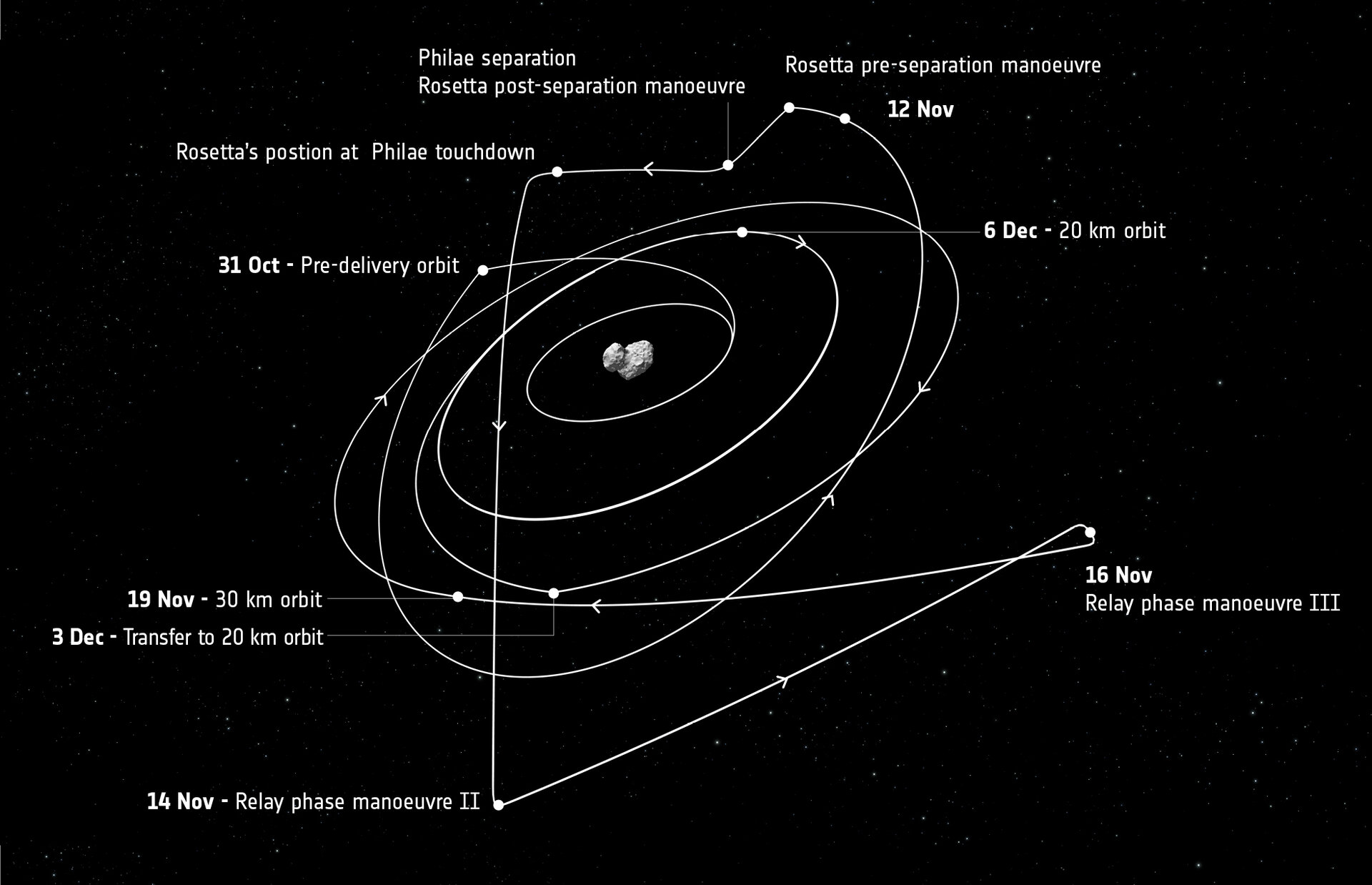
มีหลายภารกิจมากที่เราอยากหยิบยกมาเล่าให้ฟังซึ่งเป็น Milestone สำคัญของการเดินทางในอวกาศ ที่เราจะขอหยิบยกมาเล่าให้ฟังในบทความนี้ ภารกิจ Rosetta ของ ESA ที่ปล่อยในปี 2004 ถือเป็นตัวอย่างที่คลาสสิกที่สุดของ Optical Navigation ยุคแรก ๆ เพราะดาวหาง 67P/Churyumov–Gerasimenko มีขนาดเพียง 4×3 กิโลเมตรเท่านั้น การจะ “โคจรรอบ” วัตถุเล็กขนาดนี้เป็นไปไม่ได้ถ้าไม่มีการนำทางด้วยภาพ Rosetta ใช้กล้อง Onboard ได้แก่ NavCam และ OSIRIS ถ่ายภาพดาวหางซ้ำ ๆ ทุกวัน จากนั้นใช้เทคนิค Limb Fitting และ Feature Tracking เพื่อระบุจุดศูนย์กลางมวลของดาวหาง เทียบกับ Star Catalog ที่กล้องเห็นในฉากหลัง แล้วฟิวส์ข้อมูลเหล่านี้เข้ากับการวัด Doppler จาก DSN ผลลัพธ์คือ Rosetta ค่อย ๆ ปรับ Trajectory เข้าใกล้ทีละน้อยจนสามารถโคจรรอบดาวหางได้ในปี 2014 และปล่อยยาน Philae ลงจอด แม้ Philae จะกระเด้งไม่ตามแผน แต่กระบวนการนำทางของ Rosetta เองถือว่าประสบความสำเร็จและเป็น Milestone สำคัญของ Optical Nav
ในขณะที่โครงการ DART หรือ Double Asteroid Redirection Test ของ NASA ในปี 2022 ยกระดับ Optical Navigation ไปอีกขั้น เพราะเป้าหมายคือการพุ่งชนดวงจันทร์น้อย Dimorphos (เส้นผ่านศูนย์กลาง 160 เมตร) ของระบบดาวคู่ Didymos ที่อยู่ห่างโลกกว่า 11 ล้านกิโลเมตร ยานต้องเข้าชนโดยตรงที่ความเร็ว 6.6 กิโลเมตรต่อวินาที และไม่มีทางพึ่งพาคำสั่งจากโลกได้ทันเพราะสัญญาณ Delay กว่า 40 วินาที DART จึงใช้ DRACO Camera และระบบ SMART Nav หรือ Small-body Maneuvering Autonomous Real Time Navigation ที่ประมวลผลภาพ Onboard ตรวจแยกเป้าหมาย Dimorphos ออกจาก Didymos และปรับ Trajectory แบบ Real-time ในช่วงชั่วโมงสุดท้ายก่อนชน นี่คือครั้งแรกที่ Autonomous Optical Nav ถูกใช้แบบ Do-or-Die และผลลัพธ์คือยานพุ่งชนเป้าได้ตรงกลาง เปลี่ยนคาบการโคจรของ Dimorphos ลงไป 33 นาทีตามที่ออกแบบไว้

ในขณะที่อีกภารกิจที่ยังไม่เกิดขึ้นแต่น่าจับตามองมาก ๆ คือภารกิจ Martian Moons eXploration (MMX) ของ JAXA ที่มีกำหนดปล่อยในปี 2026 วางเป้าหมายจะเก็บตัวอย่างจากดวงจันทร์โฟบอสของดาวอังคารซึ่งมีแรงโน้มถ่วงต่ำมาก การลงจอดบนวัตถุที่ “ดึงดูดยาน” แทบจะไม่อยู่ในระดับมิลลิเมตรต่อวินาทีก็เป็นโจทย์ใหญ่ Optical navigation จึงเป็นหัวใจสำคัญ MMX จะใช้ Navigation Camera หรือ NavCam ผสมกับ LIDAR เพื่อสร้างข้อมูลตำแหน่งสัมพัทธ์ขณะเข้าใกล้พื้นผิว ทุกภาพที่ได้จะถูกเปรียบเทียบกับแผนที่ความละเอียดสูงของ Phobos ที่เตรียมไว้ล่วงหน้าหรือ Map-Based Navigation เพื่อให้ยานสามารถปรับการเคลื่อนที่ลงจอดอย่างปลอดภัย Autonomous Navigation จึงไม่ใช่แค่ทางเลือก แต่เป็นเงื่อนไขความอยู่รอดของภารกิจ
อนาคตของการเดินทางในอวกาศจะเป็นอย่างไร
ตลอดกว่า 60 ปีที่ผ่านมา วิธีคิดในการติดตามและนำทางยานอวกาศยังคงยึดโยงกับโลกเป็นหลัก เรามองยานเป็นวัตถุหนึ่งบนทรงกลมท้องฟ้าหรือ Celestial Sphere แล้วใช้เครือข่ายภาคพื้นดินอย่าง Deep Space Network หรือ DSN วัด Doppler และ Ranging เพื่อสร้าง Ephemeris ทุกอย่างคือการ “บอก” ยานจากโลกว่าอยู่ตรงไหนและควรไปทางไหน แต่ในความเป็นจริง การเดินทางอวกาศไม่จำเป็นต้องผูกติดกับโลกเสมอไป การสร้าง Reference ใหม่ในอวกาศเองกำลังจะกลายเป็นก้าวต่อไปของ Navigation
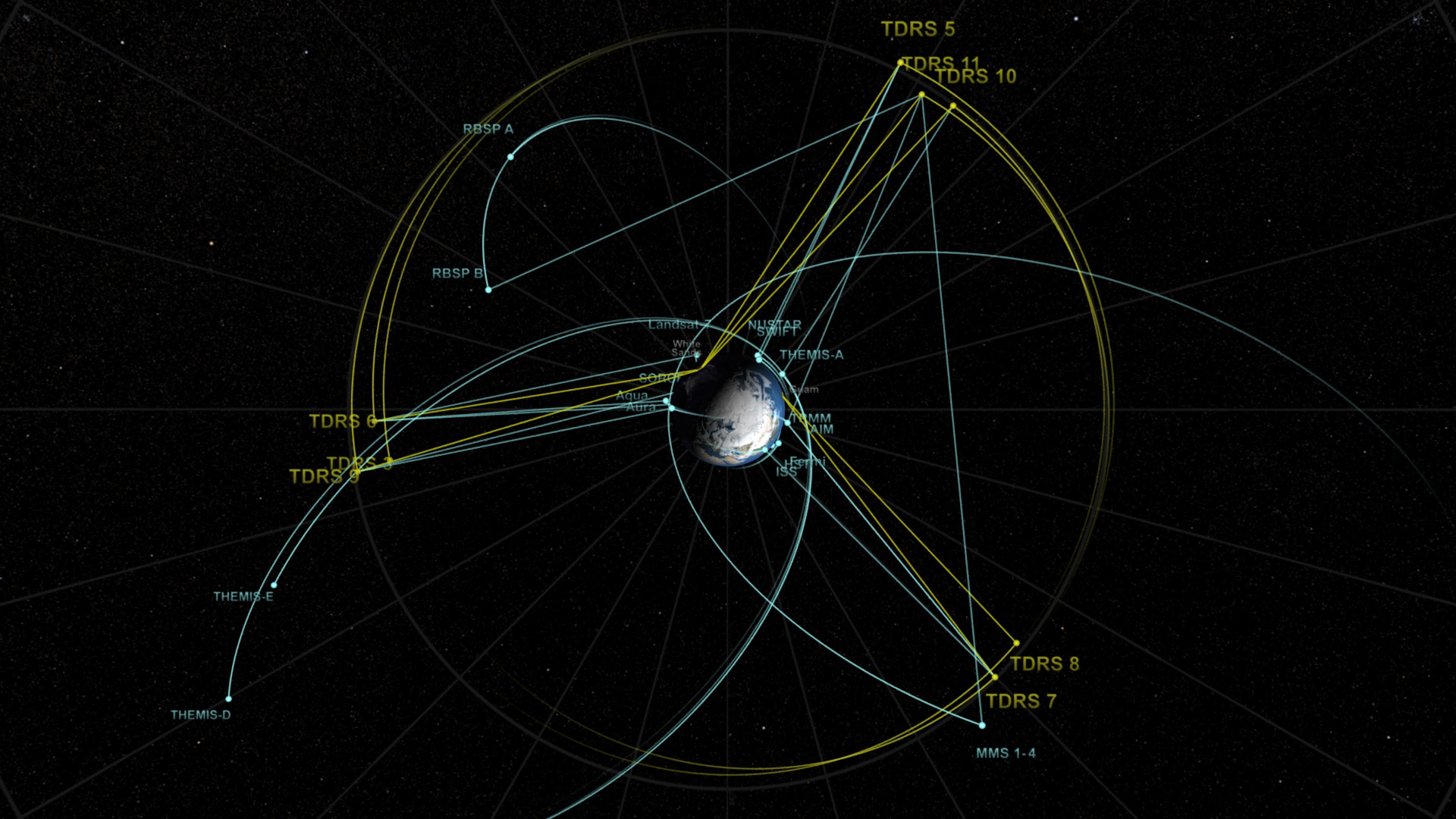
ตัวอย่างที่เริ่มใช้แล้วคือระบบ TDRSS หรือ Tracking and Data Relay Satellite System ของ NASA เครือข่ายดาวเทียม Geostationary ที่โคจรรอบโลกและทำหน้าที่เป็น Relay สัญญาณให้กับกระสวยอวกาศ, สถานีอวกาศนานาชาติ, และดาวเทียม LEO อื่น ๆ แทนที่จะรอจังหวะโลกหมุนให้สถานีภาคพื้นเห็นยานตรง Overhead ดาวเทียม TDRS สามารถเชื่อมต่อได้เกือบต่อเนื่อง ทำให้ได้ข้อมูล Tracking และ Telemetry แบบ Real-time ตลอดภารกิจ แนวคิดนี้ขยายขอบเขตการมองจาก “โลก” ไปสู่วงโคจรเหนือโลก
จีนเองก็พัฒนาแนวทางคล้ายกันในโครงการสำรวจดวงจันทร์ เช่น Queqiao Relay Satellite ที่วางไว้ที่ตำแหน่ง Earth–Moon L2 Lagrange Point เพื่อใช้เป็นสะพานเชื่อมการสื่อสารกับยาน Chang’e ที่อยู่ฝั่งไกลของดวงจันทร์ ตำแหน่ง L2 ทำให้ Queqiao มองเห็นทั้งโลกและดวงจันทร์ด้านไกลพร้อมกัน ซึ่งไม่เพียงแค่ส่งข้อมูลกลับ แต่ยังใช้สำหรับการ Tracking และการกำหนดพิกัดสัมพัทธ์ของยานที่อยู่บนดวงจันทร์ได้ด้วย
ในอนาคต เราอาจได้เห็นการสร้าง “เครือข่ายนำทางนอกโลก” ที่หลากหลายขึ้น เช่น ดาวเทียม Navigation Network รอบดวงจันทร์หรือดาวอังคาร ซึ่งจะทำงานแบบเดียวกับ GPS บนโลกแต่ปรับให้ครอบคลุมพื้นที่เป้าหมาย, Inter-Satellite Links ที่ให้ยานอวกาศหลายลำสื่อสารหากันเองเพื่อสร้าง Reference เฉพาะกิจ คล้ายการทำ GNSS กลางอวกาศ, หรือแม้กระทั่งการใช้ X-ray Pulsar Navigation ซึ่งอาศัยการวัดเวลาของการกระพริบจากดาวนิวตรอน เป็น “นาฬิกาธรรมชาติ” ในอวกาศเพื่อให้ยานกำหนดตำแหน่งของตัวเองโดยไม่ต้องพึ่งสัญญาณจากโลกเลย
การเปลี่ยน Reference จาก “โลก” ไปสู่ “อวกาศเอง” จึงไม่ใช่แค่เรื่องของเทคนิค แต่เป็นการเปลี่ยนวิธีคิดเชิงยุทธศาสตร์ด้วย เพราะเมื่อเราสามารถสร้างระบบนำทางที่พึ่งพาได้ในระดับท้องถิ่น เช่น ดวงจันทร์ ดาวอังคาร หรือแม้แต่ระหว่างดาวเคราะห์ การสำรวจอวกาศจะไม่ต้อง “รอโลกบอก” อีกต่อไป แต่ยานอวกาศจะมีความเป็นอิสระมากขึ้นในการตัดสินใจ เส้นทางการเดินทางก็จะยืดหยุ่นและแม่นยำขึ้น และนี่คือก้าวที่ทำให้อนาคตของการสำรวจดาวเคราะห์น้อย ดาวหาง หรือแม้แต่การเดินทางระหว่างดวงดาวมีความเป็นไปได้จริง
การเดินทางในอวกาศนั้นเป็นสิ่งที่ยากมากแต่เราทำได้
เรารู้จักการเดินทางจากการเงยหน้ามองดาว ตั้งแต่ยุคนักเดินเรือใช้ Sextant และนาฬิกาเดินเรือวัดละติจูดลองจิจูด สู่ยุคอวกาศที่เราวัด Doppler และ Ranging จาก DSN เพื่อคำนวณ Trajectory ของ Pioneer และ Voyager จากนั้นต่อยอดเป็น ephemeris และ SPICE ที่ทำให้ตำแหน่ง ทิศทาง และการชี้เครื่องมือของทุกภารกิจถูกบันทึกอย่างเป็นระบบ ยานอวกาศเริ่มมี Star Tracker, Sun Sensor และ Optical Navigation ช่วยให้มัน “รับรู้” ตัวเอง และ Course Correction กับ Gravity Assist ก็ทำให้เราสามารถวางเส้นทางที่แม่นยำอย่างไม่เคยมีมาก่อน
แต่ทั้งหมดนี้ยังสะท้อนวิธีคิดแบบ “โลกเป็นศูนย์กลาง” ที่ทุก Reference เริ่มจากเครือข่ายภาคพื้นดิน และมองยานอวกาศเป็นวัตถุหนึ่งบนท้องฟ้า สิ่งที่กำลังเกิดขึ้นคือการเปลี่ยนกรอบคิดครั้งใหญ่ เราเริ่มสร้าง Reference ใหม่ในอวกาศเอง ไม่ว่าจะเป็น TDRSS ของ NASA ที่ให้การเชื่อมต่อแบบ Real-time, Queqiao ของจีนที่ยืนคุม Lagrange Point ระหว่างโลก–ดวงจันทร์ หรือแนวคิด Pulsar Navigation ที่ใช้การกระพริบของดาวนิวตรอนเป็น GPS ของจักรวาล ทั้งหมดนี้คือการค่อย ๆ หลุดออกจากการผูกติดกับโลก
นี่จึงไม่ใช่แค่การพัฒนาทางเทคนิค แต่มันคือการประกาศว่า มนุษย์ไม่ได้เป็นเพียงผู้สังเกตดวงดาวอีกต่อไป แต่เรากำลังสร้างระบบนำทางของตัวเองท่ามกลางดวงดาว จาก Sextant ที่เคยช่วยนักเดินเรือในมหาสมุทร ไปจนถึง Star Tracker ที่บอกทิศ Cassini รอบดาวเสาร์ หรือ SMART Nav ที่ทำให้ DART พุ่งชนเป้าได้เอง ทุกอย่างคือเส้นเรื่องเดียวกัน การรู้ว่าตัวเองอยู่ที่ไหน เพื่อจะได้ก้าวต่อไปอย่างมั่นคง และวันนี้ Trajectory ที่เราคำนวณไม่ได้พาเราแค่ไปดาวเคราะห์ แต่กำลังพาเราออกจากโลกไปสู่จักรวาลทั้งผืน
ชวนอ่านบทความเรื่อง เยือน NASA Jet Propulsion Laboratory จากห้องควบคุม สู่โรงเก็บโรเวอร์
เรียบเรียงโดย ทีมงาน Spaceth.co